
Активность
Лента обновляется автоматически
- Последний час
- Сегодня
-
 qazse123 присоединился к сообществу
qazse123 присоединился к сообществу -
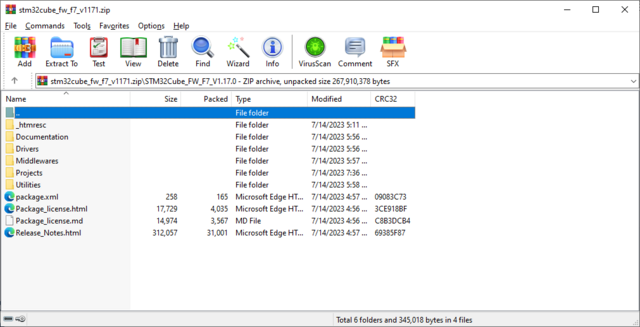
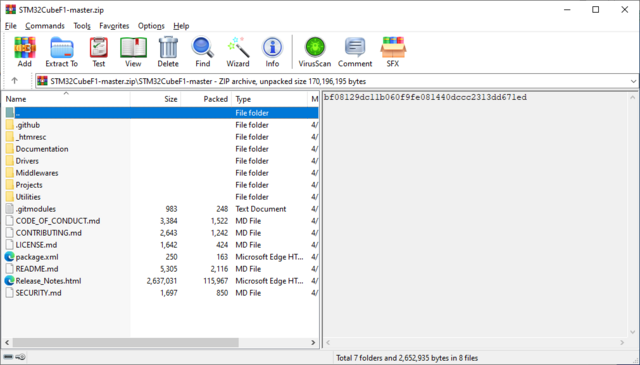
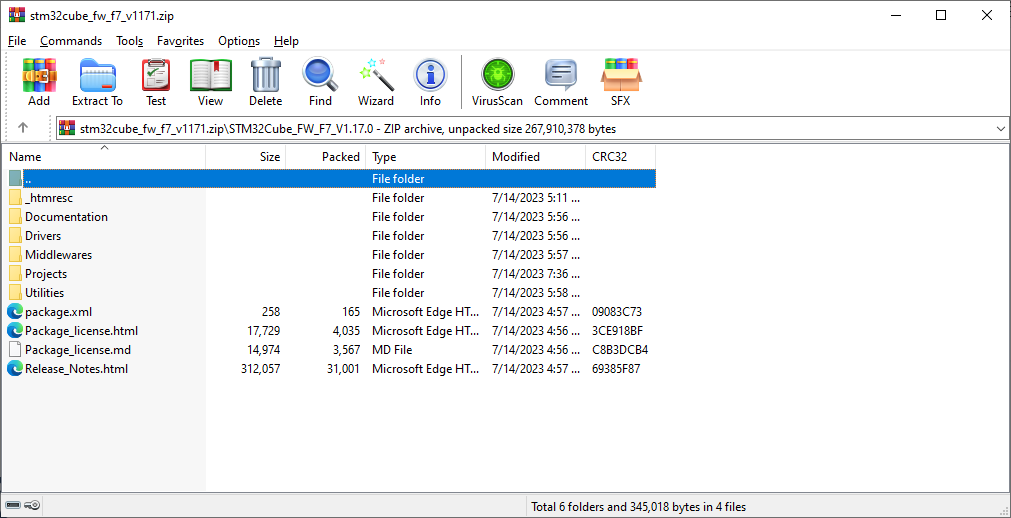
Скачиваете нужный и пдсовывете Вот содержимое пакета А вот корневой каталог repo после скачивания
-
Вот что выяснил: Задержка при приеме из виртуального COM-порта возникает, если ReadFileEx не знает сколько байт нужно принять и ждет паузы между принятыми байтами. Например так : ReadFileEx(hSerial, DataBuf, sizeof(DataBuf), &OverLap, (LPOVERLAPPED_COMPLETION_ROUTINE)RxComplete); Примет он например 10 байт, паузы дождется(по факту плюс еще 35 мс) и вызовет RxComplete. Если же четко задать сколько байт надо принять (например 1 байт), то все происходит намного быстрее. Задержка между приемом и отправкой ~ 3 мс. ReadFileEx(hSerial, DataBuf, 1, &OverLap, (LPOVERLAPPED_COMPLETION_ROUTINE)RxComplete); Конечно теперь придется другой функции разбираться в этой каше, искать где начало данных, но в принципе задержка стала почти в 10 раз меньше.

-
Работа периодическая, не на полную занятось, те больше в режиме подработки. География - чтобы можно было иногда доехать в офис, но в целом дистанционная. Работаем в основном над своими идеями, заказного мало. Производим, в основном, диктофоны Edic-mini ( www.telesys.ru ). Идеологически они несложные (по сути микрофон, контроллер (STM32 сейчас) и память) и похожие, но мы выжимаем максимум из параметров (минимальный размер и тд) те оптимизация - это основное. Суть работы сводится к сборке проектов в кучу, их проверке, наведению лоска, отладке технологии сборки, доделке ничейных мелочей и тд. Как правило, схему, прошивку у нас делает один человек, плату разводит другой, корпусные детали делает третий. Все это нужно в кучу собрать чтобы получился диктофон, потестить, собрать обратку от продажников, истории ремонтов, дать рекомендации что надо изменить, где поправить (или сделать это самому, если есть навыки - получится быстрее), описать (или видео) технологию сборки и контроля для серийной сборки (сборку плат мы заказываем на стороне, а у себя делаем финальную сборку) и тд. Какие навыки полезны: тестер, осциллограф, паяльник, лазерный гравер/резак, 3D принтер. Ну и общее понимание техники. Все мелкое, поэтому хороошее зрение важно. Если можете делать какую-то работу на уровне разработчика/конструктора, то можем озадачить и ею. Оплата - ну, наверное, попроектно. Договоримся. Раньше у нас был человек для этой работы, но у нас случился большой перерыв во внедрении новых изделий, поэтому ищем нового. С предложениями пишите в личку, плиз.
-
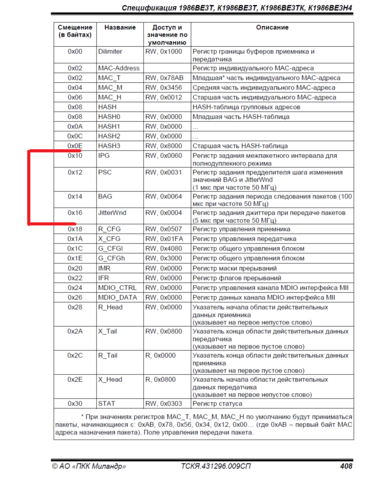
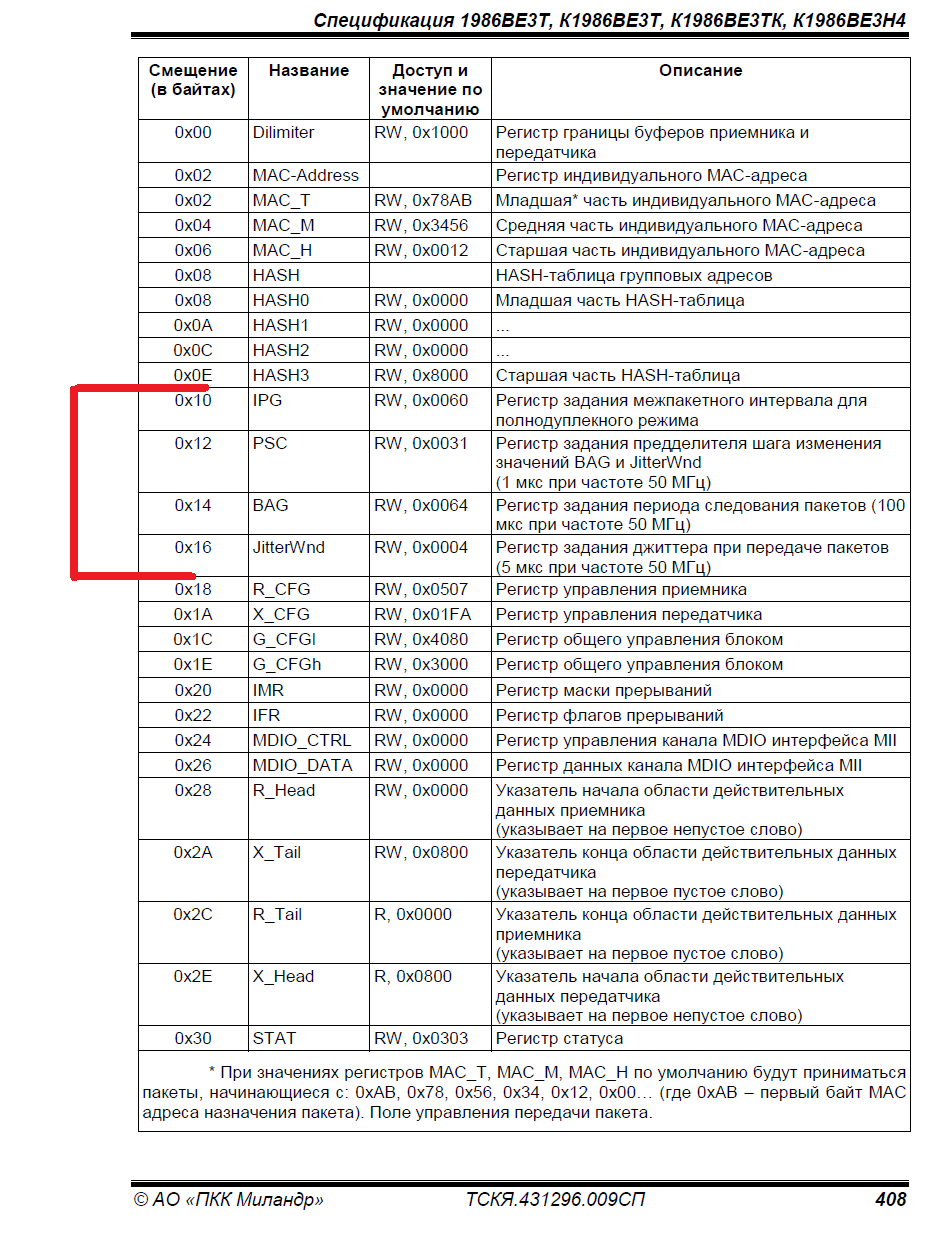
Факт есть факт. На своём устройстве я ничего не трогаю, на ПК меняю ful/half. В обоих случаях на ПК есть приём. Если не трудно повторите тезисно, может действительно что-то пропустил. Да проверял уже... Ну оно, собственно, и логично. Если скорости совпадают, то почему должен отсутствовать приём. Это делалось исключительно ради эксперимента. У меня была задача проверить мой передатчик, передаёт ли он все кадры. В ответ с ПК я ничего не посылал. Я только подсчитывал кадры. То есть виндовозными средствами никак? У меня нет уверенности что установка режима в 1986BE3T отрабатывает правильно. К тому же есть подтверждение И если BE1 глючат то почему BE3 не могут? Вот я и хотел через ПК посмотреть какой режим стоит по факту. И ещё вопрос, кто-нибудь может объяснить мне смысл этих полей:
- Вчера



-
Пользователи
- gazpar
- dm_mur
- kochevkv
- alex2022
- HardEgor
- tony_copper
- Ozelot
- A.V.Avtomat
- sh007
- illich
- vsrb
- BOS
- тау
- DAV
- Палыч
- Пыщ-пыщ
- speleoastronom
- makc
- Zig
- zxc_pavel
- 3apw
- mcuprog
- Алексей ВМ1
- Alex_2015
- fighter_161
- Alex77
- aBoomest
- iosifk
- Михась
- Shamil
- Katatsuburi
- vguard
- stells
- remontsofta
- antis
- EdgeAligned
- kpv
- oratie
- uve
- ANATOLP
- НЕХ
- Burenkov
- Vasil_Riabko
- AlexMI
- MartensA93
- RDutch
- Ramil
- BigRed
- EugeneS
- GPP
- Flip-fl0p
- aegis
- Anxigeros
- whale
-
Статистика пользователей
55 009
Пользователей3 774
Максимум онлайн