Поиск
Показаны результаты для тегов 'spi'.
-
Spartan3AN - SPI Device not found
Valek87 опубликовал тема в Работаем с ПЛИС, области применения, выбор
Здравствуйте. Помогите пожалуйста разобраться с программированием внутренней flash микросхемы Spartan3AN. PROG_B и INIT_B через резистор 4,7 кОм к VCC, SUSPEND = GND, M2:0 = "JTAG" Вот что пишется после подачи питания при нажатии "Get device ID": Вот что пишется после подачи питания при нажатии "Read device status": Если просто прошить ПЛИС, то без проблем она прошивается. Но стоит попытаться прошиться во внутреннюю flash, то вот что пишется: Пишется якобы не найден внутренний SPI. Я пробовал на трёх микросхемах. И везде одинаковый результат. Подскажите, пожалуйста, на что обратить внимание!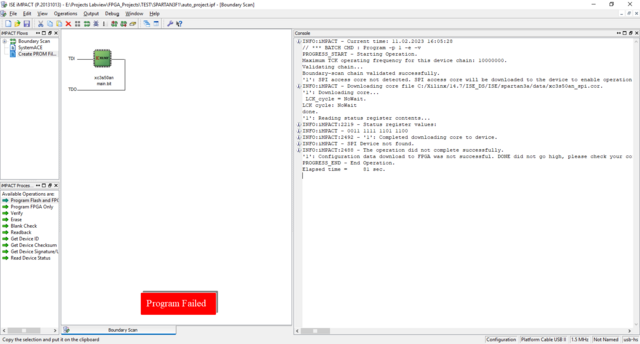
-
Компания Everspin объявила о запуске производства образцов нового семейства микросхем памяти с интерфейсами SPI/QSPI/xSPI – серия EMxxLX. Данная серия является самой высокопроизводительной постоянной памятью с полной пропускной способностью чтения и записи 400 Мбайт/c. Подробнее

-
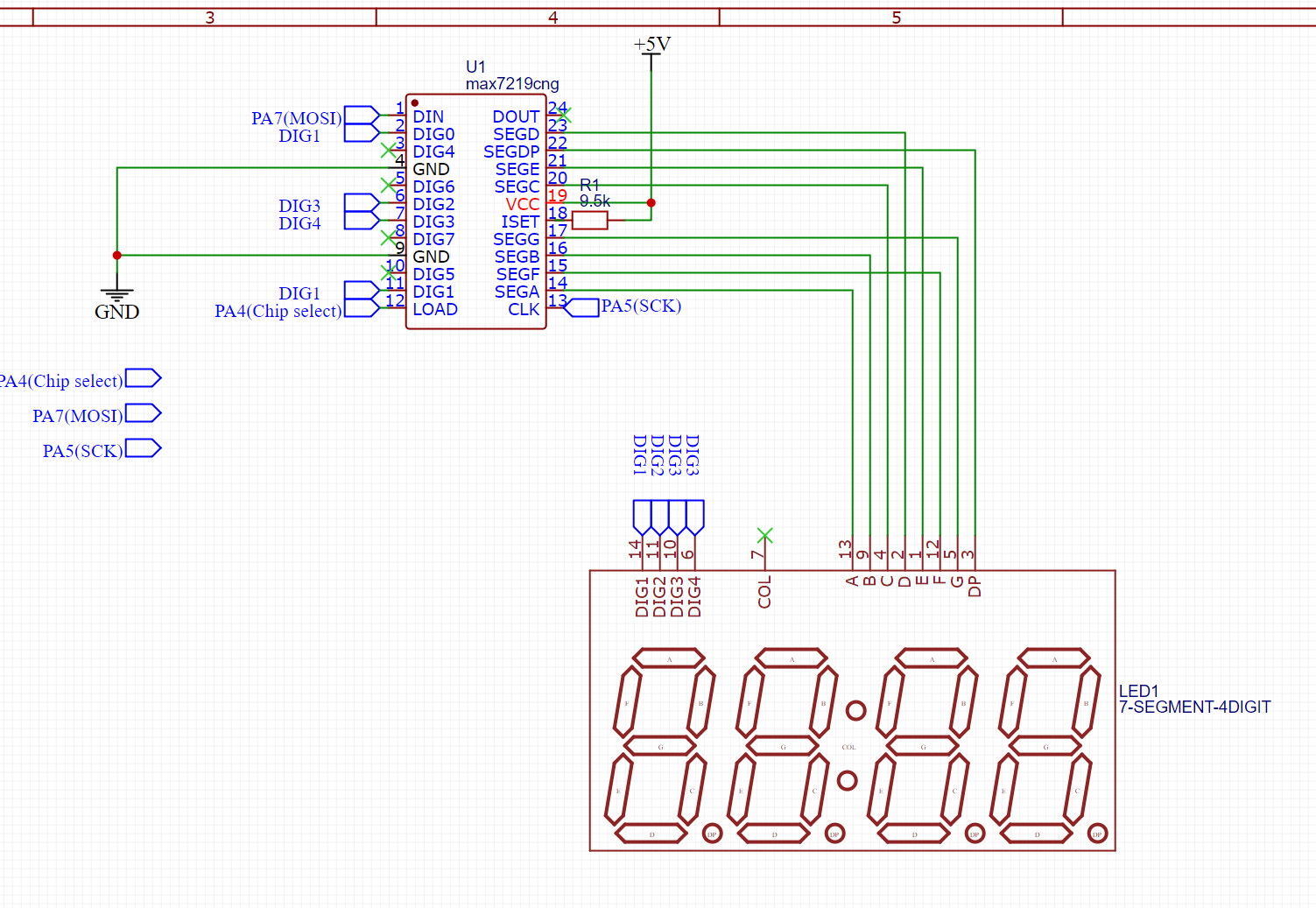
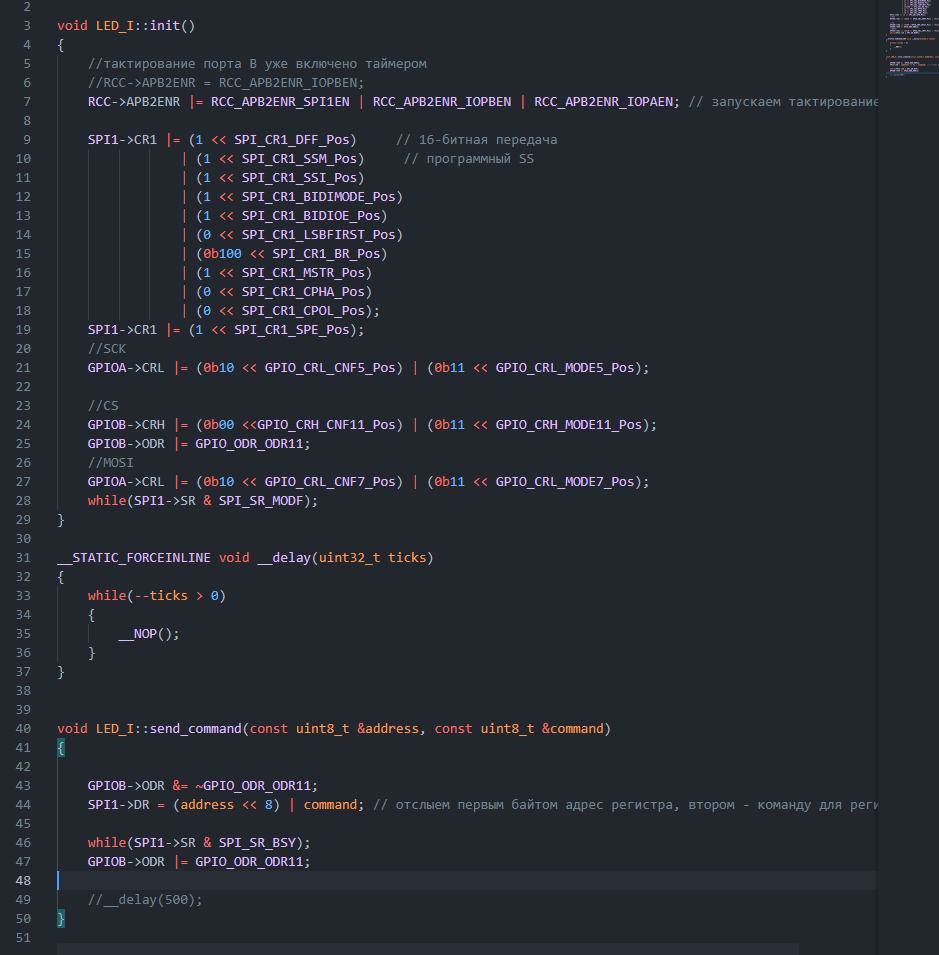
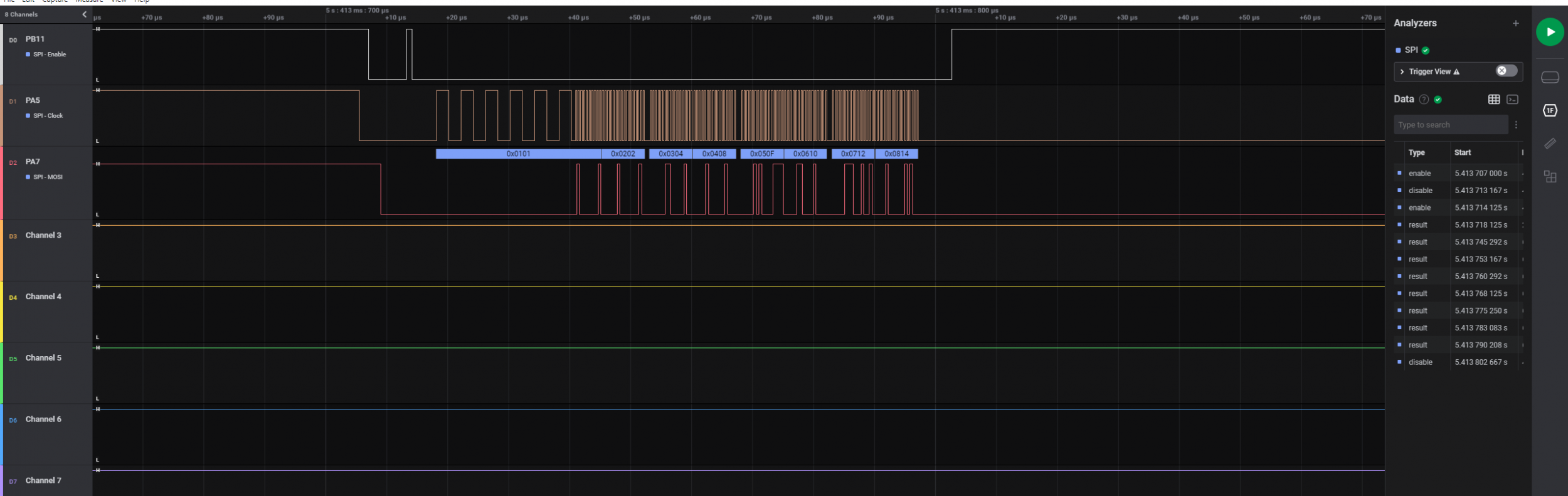
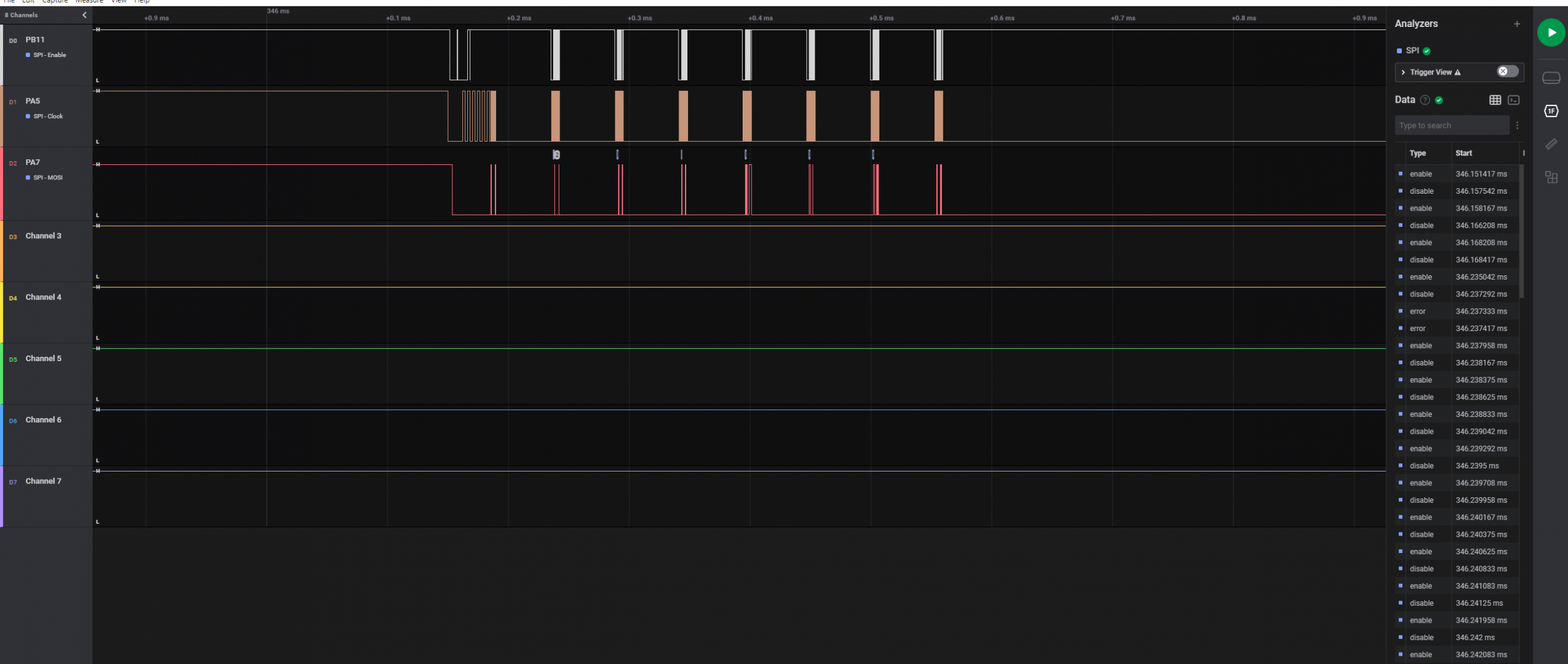
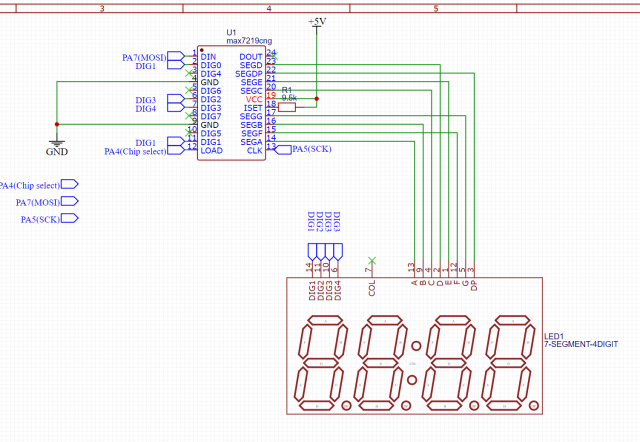
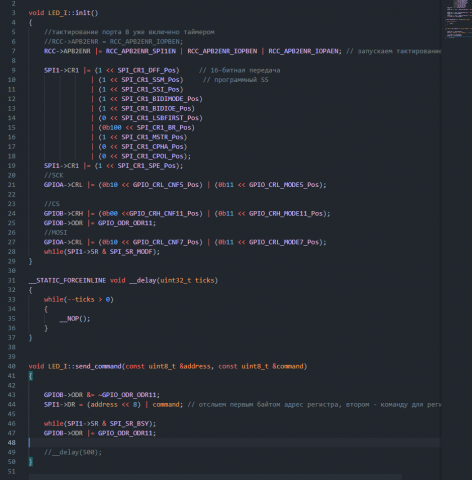
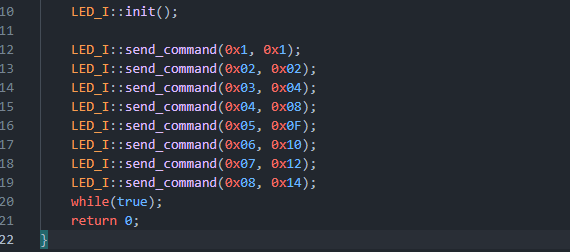
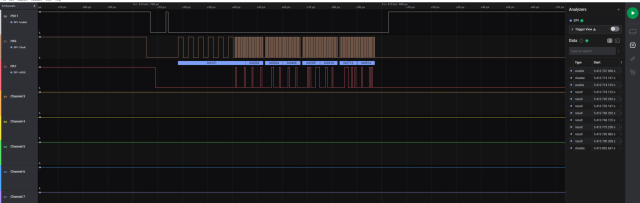
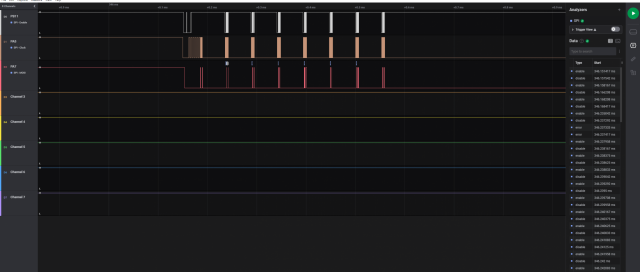
Приветствую, друзья! Передо мной стоит задача: подключить камень stm32f103c8t6 по SPI через MAX7219 к семисегментнику. Подключал по схеме: Выясняется, что у меня ничего не работает. Понять почему я, увы, не могу. Функции инициализации SPI и отправки данных: Чтобы понять проблему, я подключил логический анализатор ко всем трем выводам(MOSI, SCK, SS): Исходя из даташита на MAX7219, она принимает данные после того, как будут отправлены 2 байта и поднята ножка SS. На фотографии с анализатора становится понятно, что SS дергается после того, как абсолютно все данные уйдут. В чем проблема, с чем это связано - я не могу понять. Пробовал добавить задержку в функции отправки, подумав, что, может быть, мой анализатор не фиксирует их. На что я получил ошибки в отправляемых данных: Не понимаю, что я сделал не так... Буду очень рад, если Вы подскажете! Заранее большое спасибо!
-
Нужна помощь по SPI, DMA, Vivado
Nano2021 опубликовал тема в Работаем с ПЛИС, области применения, выбор
Здравствуйте! Я работаю над реализацией высокоскоростной передачи SPI и ищу лучший вариант для блока DMA. Схематическое изображение моей конструкции:прикрепил На сайте Xilinx я нашел следующиe блоки, который могу использовать: DMA Central Direct Memory Access DataMover 1. В чем разница между DMA и CDMA? Судя по описаниям и блок-схемам, это ... как будто потоковым устройством будет устройство, которое производит или потребляет поток байтов. Устройство с отображением памяти подключается к шине памяти. Таким образом, периферийному устройству, которое хранит входящие данные в регистре с отображением в память, потребуется CDMA, а периферийному устройству, где данные поступают непосредственно из буфера FIFO, потребуется DMA. 2. AXI Data Mover. Если я подключу его с блоком AXI FIFO Stream (параметры передачи команд), я получу блок DMA, как я понял. Этот блок дает мне больше свободы в реализации? 3. Какой вариант лучше всего для передачи данных из высокоскоростного SPI через DMA в память? Я бы хотел достичь 50-100 Мбит / с Заранее спасибо за вашу помощь
-
Корпорация Winbond Electronics объявила о расширении своей линейки SPI NOR Flash, представив одинарную монолитную флеш-память SPI NOR 1,8 В 512 Мбайт, которая может поддерживать стандартную/двойную частоту до 166 МГц/quad SPI clocks. Подробнее

-
Ограничения Multi cycle
Tik31 опубликовал тема в Языки проектирования на ПЛИС (FPGA)
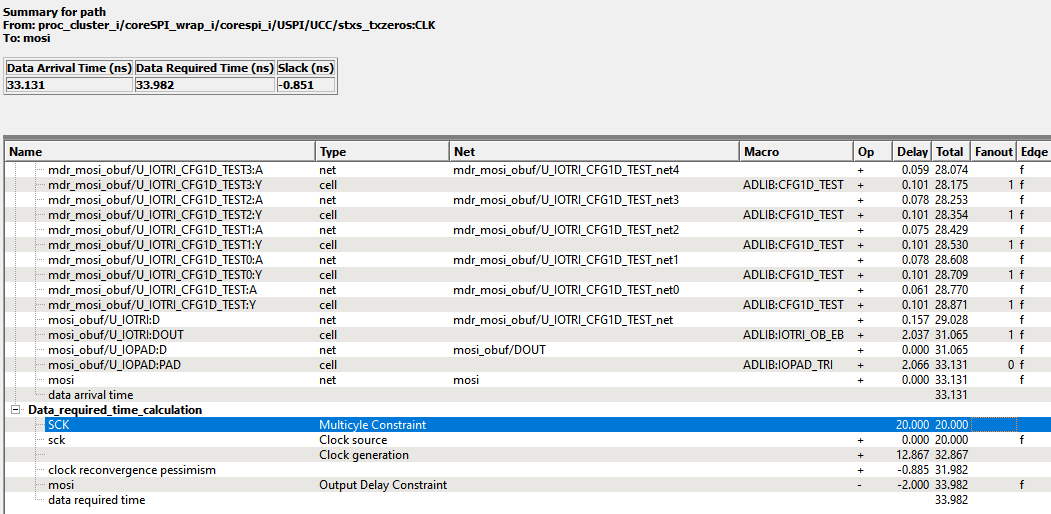
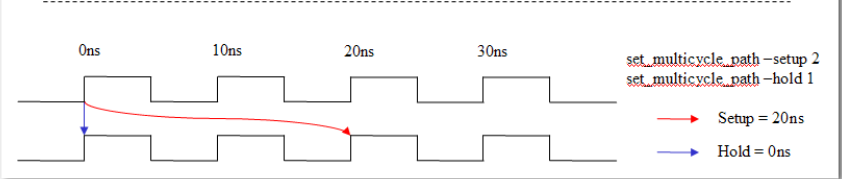
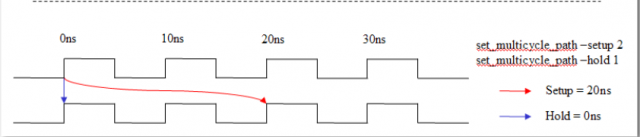
Здравствуйте! Продолжаю разбираться с написанием констрейнтов для текущего проекта (Polarfire Microchip). В этот раз проблема связана с ограничениями для SPI ядра (частота шины - 50 МГц, SPI - 25 МГц). Мною (на основе примера) был подготовлен следующий файл с ограничениями. ################################################################# # Определение частоты ################################################################## # Частота системной шины - 50 МГц. Максимальная частота SPI - 25 МГц set clkSysPeriod 20 set clkSpiPeriod 40 create_generated_clock -name SCK \ -divide_by 2 \ -source [get_pins proc_cluster_i/coreSPI_wrap_i/corespi_i/USPI/UCC/spi_clk_out/CLK] \ [get_ports sck] ################################################################# # Задание входных и выходных задержек ################################################################# set trace_delay_clock 0 set trace_delay_mosi 0 set trace_delay_miso 0 set trace_delay_ss 0 set mosi_setup 2.0 set mosi_hold 2.0 set ss_setup 3.0 set ss_hold 3.0 set mosi_max_delay [expr {$trace_delay_mosi + $mosi_setup - $trace_delay_clock}] set mosi_min_delay [expr {$trace_delay_mosi - $mosi_hold - $trace_delay_clock}] set ss_max_delay [expr {$trace_delay_ss + $ss_setup - $trace_delay_clock}] set ss_min_delay [expr {$trace_delay_ss - $ss_hold - $trace_delay_clock}] # Задание Tco для MISO (см. datasheet) set Tco_Max 8.0 set Tco_Min 0.0 set miso_max_delay [expr $Tco_Max + $trace_delay_clock + $trace_delay_miso] set miso_min_delay [expr $Tco_Min + $trace_delay_clock + $trace_delay_miso] # Данные из FPGA изменяются по заднему фронту частоты SCK и защелкиваются по переднему во Flash set_output_delay -clock [get_clocks {SCK}] -clock_fall -max $mosi_max_delay [get_ports {mosi}] set_output_delay -clock [get_clocks {SCK}] -clock_fall -min $mosi_min_delay [get_ports {mosi}] set_output_delay -clock [get_clocks {SCK}] -clock_fall -max $ss_max_delay [get_ports {ss}] set_output_delay -clock [get_clocks {SCK}] -clock_fall -min $ss_min_delay [get_ports {ss}] # Данные из Flash изменяются по заднему фронту частоты SCK и защелкиваются по переднему в FPGA set_input_delay -clock [get_clocks {SCK}] -clock_fall -max $miso_max_delay [get_ports {miso}] set_input_delay -clock [get_clocks {SCK}] -clock_fall -min $miso_min_delay [get_ports {miso}] ################################################################# # Multi-Cycle ################################################################# set multiCycleCount [expr {int(ceil($clkSpiPeriod/$clkSysPeriod))}] set_multicycle_path -setup $multiCycleCount \ -to [get_ports {mosi}] set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -to [get_ports {mosi}] set_multicycle_path -setup $multiCycleCount \ -to [get_ports {ss}] set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -to [get_ports {ss}] set_multicycle_path -setup $multiCycleCount \ -through [get_ports {miso}] \ -to [get_clocks {clk50}] set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -through [get_ports {miso}] \ -to [get_clocks {clk50}] Системная частота задается в другом файле и имеет вид: # Входная тактовая частота create_clock -name {clk} -period 20 -waveform {0 10 } [ get_ports { clk } ] # Входная частота JTAG create_clock -name {tck} -period 166.67 -waveform {0 83.33 } [ get_ports { tck } ] # Частоты SYS_PLL create_generated_clock -name {clk125} -multiply_by 5 -divide_by 2 -source [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/OUT1} ] create_generated_clock -name {clk50} -multiply_by 1 -divide_by 1 -source [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/REF_CLK_0 } ] -phase 0 [ get_pins { pll_0/PF_CCC_C0_0/pll_inst_0/OUT2} ] После P&R и Timing Verify я получил нарушение по Hold В данном очтете мне не понятно откуда берется +20 нс (Multicycle), если я задал: set_multicycle_path -hold [expr {$multiCycleCount - 1}] \ -to [get_ports {mosi}] Libero корректно воспринял конструкции как -setup 2 -hold 1. Ориентировался я на картинку ниже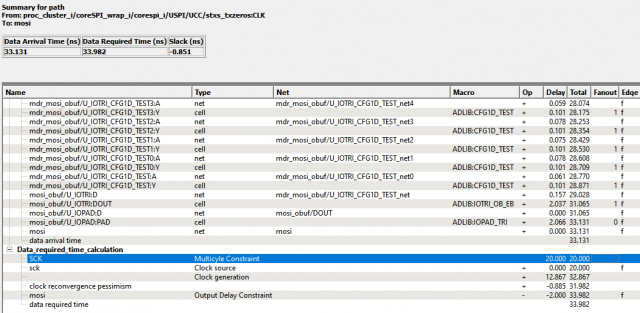
-
Гадание по эпюрам: какому контроллеру LCD они принадлежат?
Doka опубликовал тема в В помощь начинающему
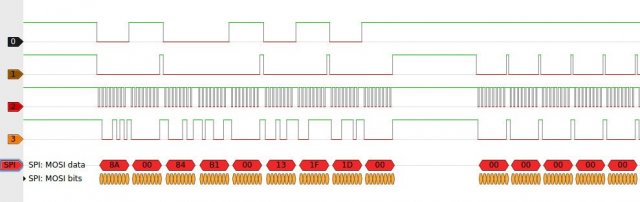
Взываю к помощи коллективного разума. Проснифал SPI-подобный интерфейс монохромного матричного LCD экрана и пытаюсь отыскать на каком контроллере он реализован, чтобы узнать полный набор команд. Сам интерфейс самый что ни на есть банальный: SCK, MOSI, CS + CMD (в даташитах на контроллеры называют RS - наследие эпохи HD44780): 0 - команда, 1 - данные. помимо десятка непонятных команд выяснилось следующее, сам вывод пиксельной инфы: команда 0xB1 - индекс строки (8битной) в которую будем выводить пиксели команда 0x1D - позиция (индекс столбца) начиная с которого выводим пиксели После 0x1D и индекса идут сразу непосредственно данные экрана, для экрана 100х100 это, например, 100 байтов (т.е. строка 8х100). Этот протокол (и контроллер) используется и в дисплее 100х100, и в дисплее 256х64, притом есть некая разновидность контроллера, когда CS выдаётся не на каждую команду, а только на данные, сопровождающие конкретную команду (скриншот приложу). Притом похоже встрачаются двухбайтовые команды (не В1, а 84В1 а после payload — байт данных для этой команды) Может кому попадался такой протокол и подскажет конкретную модель контроллера?

-
ADSP-CM409F проблемы c SPI
Vengin опубликовал тема в Все остальные микроконтроллеры
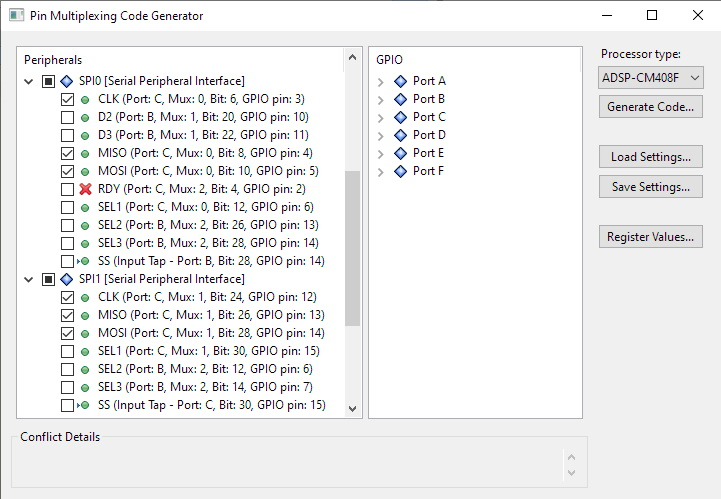
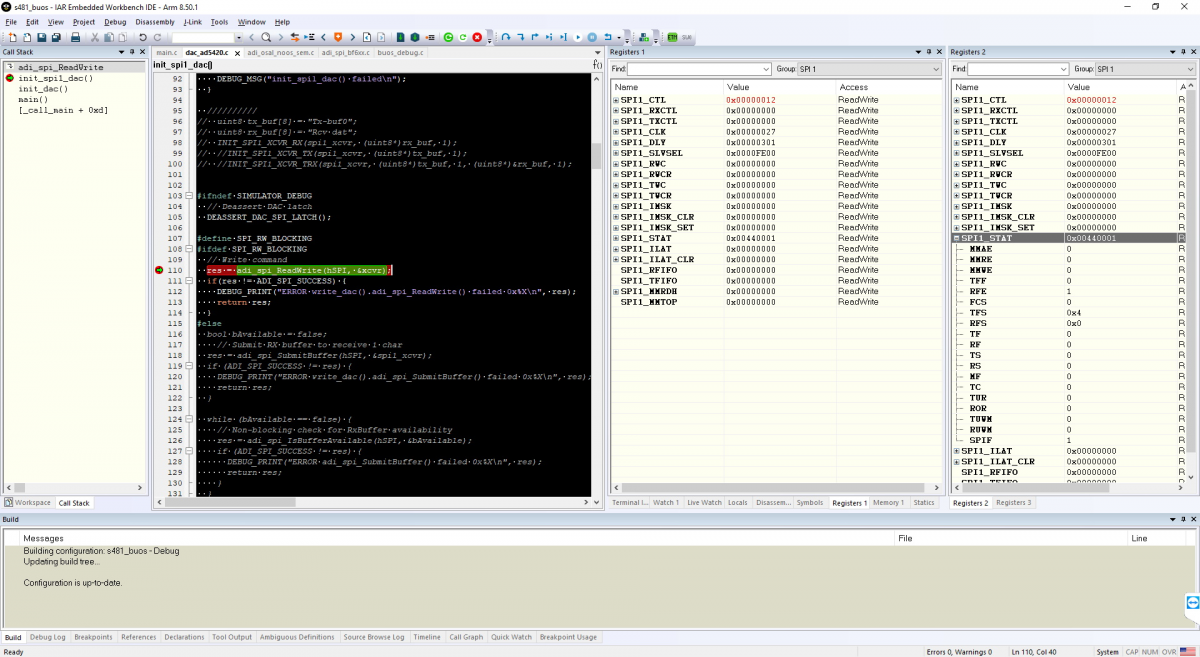
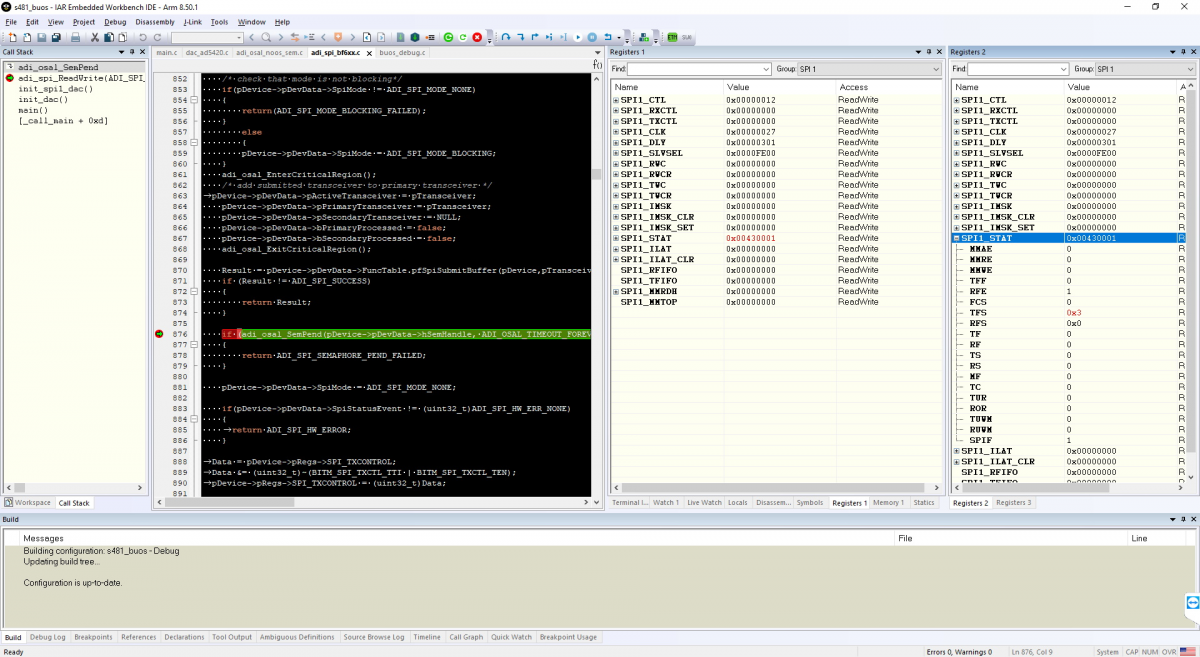
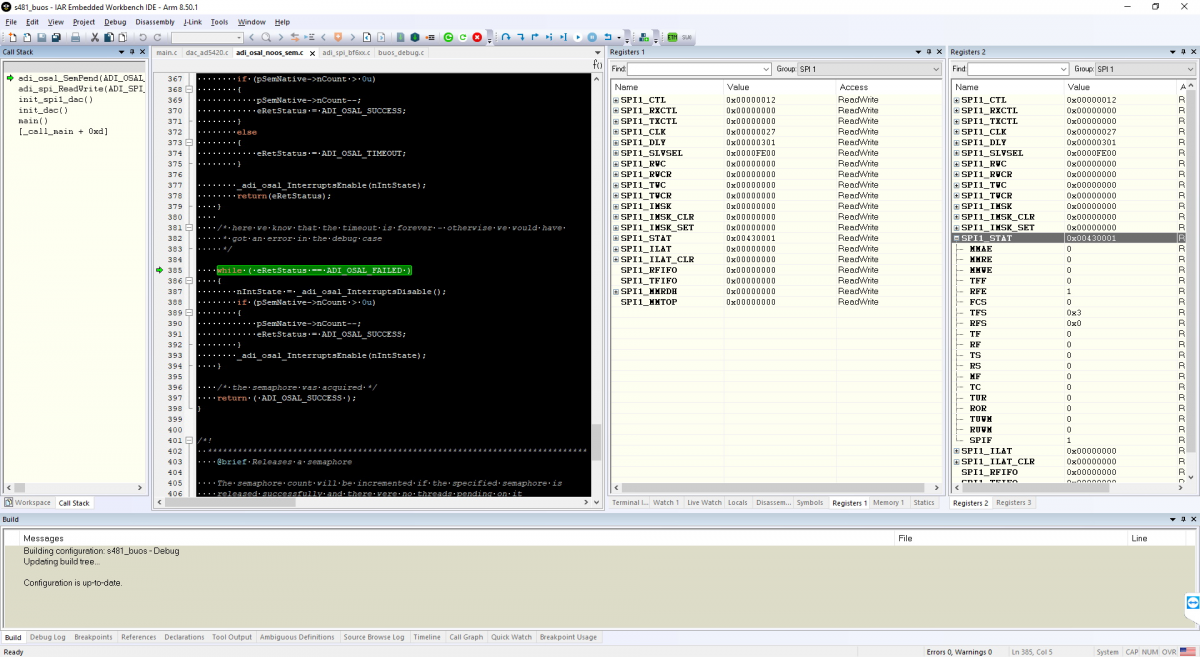
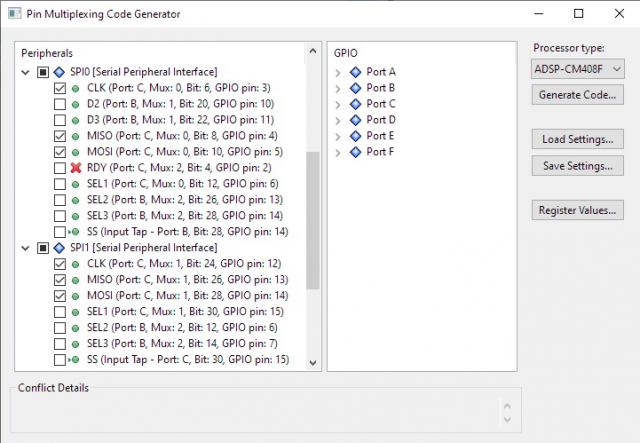
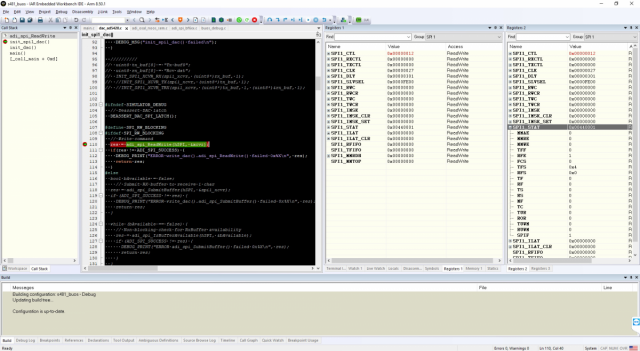
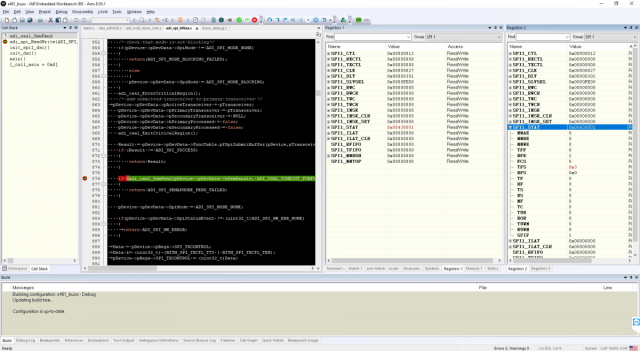
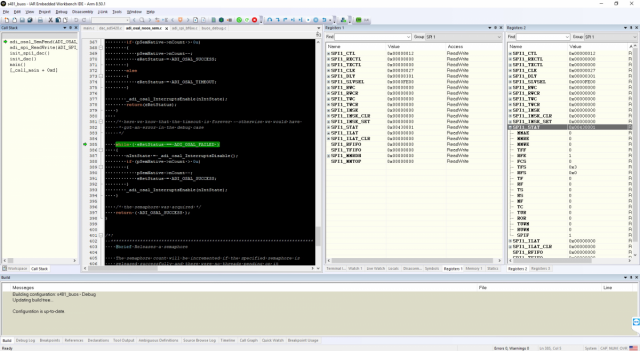
Здравствуйте. Имеется кастомная плата с процессором ADSP-CM409F (Analog Devices). Задействовано два SPI интерфейса, и любые попытки транзакций чтения/записи не происходят (блокируются). Далее детали. Используется два SPI интерфейса (SPI_0, SPI_1), оба подсоединены к Porct_C (к специальным пинам, которые могут быть промультиплексированы на SPI интерфейс): Мультиплексирование сделано используя PinMux тул (часть "ADSP-CM40x Enablement Package"): Код для тестирования SPI базируется на примере “SPI_flash_read” (также входящий в "ADSP-CM40x Enablement Package"), который использует выделенный SPI_2 интерфейс для чтения встроенной Flash памяти, и этот пример работает. Далее упрощённая версия кода (который не работает) для инициализации и чтения одного байта по SPI_1: #include <stdio.h> #include <drivers/spi/adi_spi.h> // SPI variables uint8_t rx_buf[4] = {0}; // SPI_1 transceiver setup for 1 byte RX operation (without prologue) ADI_SPI_TRANSCEIVER xcvr = { NULL, 0, NULL, 0, &rx_buf[0], 1 }; static ADI_SPI_HANDLE hSPI; static uint8_t SpiMemory[ADI_SPI_INT_MEMORY_SIZE]; ADI_SPI_RESULT tst_spi1() { /******************************************************************************* * SPI Init: Master, Non-DMA mode, Software SlaveSelect ******************************************************************************/ ADI_SPI_RESULT res; res = adi_spi_Open(1, &SpiMemory, ADI_SPI_INT_MEMORY_SIZE, &hSPI); res += adi_spi_SetMaster(hSPI, true); //set as master res += adi_spi_SetHwSlaveSelect(hSPI, false); // Software (not Hardware) Slave Select res += adi_spi_SetWordSize(hSPI, ADI_SPI_TRANSFER_8BIT); // 8-bits word size res += adi_spi_SetClock(hSPI, 39); // 2 MHz (for SYSKCLK = 80MHz) res += adi_spi_SetClockPolarity(hSPI, true); // Active HIHG clock res += adi_spi_SetClockPhase(hSPI, true); // Data transitions on the RISING edge of the clock res += adi_spi_RegisterCallback(hSPI, NULL, NULL); // none res += adi_spi_EnableDmaMode(hSPI, false); // Interrupt driven mode /******************************************************************************* * SPI transfer to read 1 byte in either Blocking/Non-Blocking mode ******************************************************************************/ #define SPI_RW_BLOCKING #ifdef SPI_RW_BLOCKING // Blocking Transfer res = adi_spi_ReadWrite(hSPI, &xcvr); #else // Non-Blocking Transfer bool bAvailable = false; // Submit RX buffer to receive 1 char res = adi_spi_SubmitBuffer(hSPI, &xcvr); do { // Non-blocking check for rx_buf availability res = adi_spi_IsBufferAvailable(hSPI, &bAvailable); if (ADI_SPI_SUCCESS != res) { break; // exit the loop } } while (!bAvailable); #endif // SPI_RW_BLOCKING return res; } Код состоит из двух частей: Инициализация (Master, Non-DMA mode, Software Slave-Select). Транзакция чтения 1 байта в блокирующем/неблокирующем режиме. Проблема возникает во 2-ой части при попытке транзакции данных. Любая транзакция (чтения/записи в блокирующем или неблокирующем режиме) никогда не заканчивается, а зависает в бесконечном цикле ожидания. В блокирующем режиме код зависает на строке adi_spi_ReadWrite(hSPI, &xcvr): Внутри функции adi_spi_ReadWrite() видно, что код зависает на функции adi_osal_SemPend(): При входе в функцию adi_osal_SemPend(): видно что код просто крутится в бесконечном цикле while, в котором вроде что-то связанное с прерываниями (функции _adi_osal_InterruptsDisable()/_adi_osal_InterruptsEnable()): Такая же проблема возникает в неблокирующем режиме. В этом случае после передачи буфера (функция adi_spi_SubmitBuffer(hSPI, &xcvr) ), код зависает на функции adi_spi_IsBufferAvailable(), т.е. буфер данных никогда не становится доступным. Что конкретно не так непонятно. Пробовал разные настройки инициализации – не помогает. Пробовал разные комбинации чтения/записи данных разных размеров – ничего. Проблема идентична для обоих SPI интерфейсов (SPI_0 и SPI_1). Может кто знает, в чем может быть проблема и как это решить? ADSP-CM409F SPI debug.zip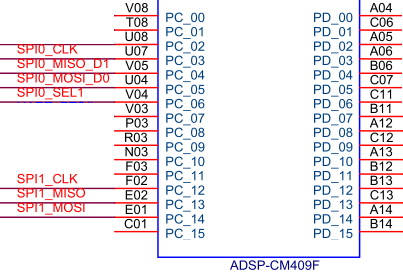
-
Помогите разобраться с AT89s8253
Владимир В опубликовал тема в MCS51, AVR, PIC, STM8, 8bit
Пытаюсь освоить работу с AT89s8253. Начал мастерить отладочную плату и для дальнейшей разработки встал вопрос о связи с внешними устройствами посредством: USB, LAN, RS485. Наткнулся в инете на LAN модули имеющие интерфейс SPI, однако порты ввода вывода модуля LAN имеют несколько соединительных линий (SS, MOSI, MISO, SCK) а AT89s8253 имеет на своем борту для SPI только Р 3.0 Ранее я работал с 80С51 Intel, теперь пытаюсь вспомнить молодость и собрать конкретную умную железку. Информации о AT89s8253 в свободном доступе очень мало, даже не попадается карта адресов регистров данной сборки. А говорить о решениях с интерфейсами пока только кажется наглостью с моей стороны. Ощущение, что Atmel не поддерживает свои изделия. На данный контроллер практически отсутствуют средства разработки: Эмуляторы, симуляторы. Нашел отладочную плату для студентов и разработчиков, жду доставку. Хоть что то чем совсем ни чего. Городить кучу кубиков вокруг контроллера не хочется, было бы идеальным получить вектор в котором нужно двигаться для объединения высокоскоростных последовательных интерфейсов с вышеупомянутым контроллером.
-
Варианты отображения карты регистров конфигурации чипа
alexunder опубликовал тема в Программирование
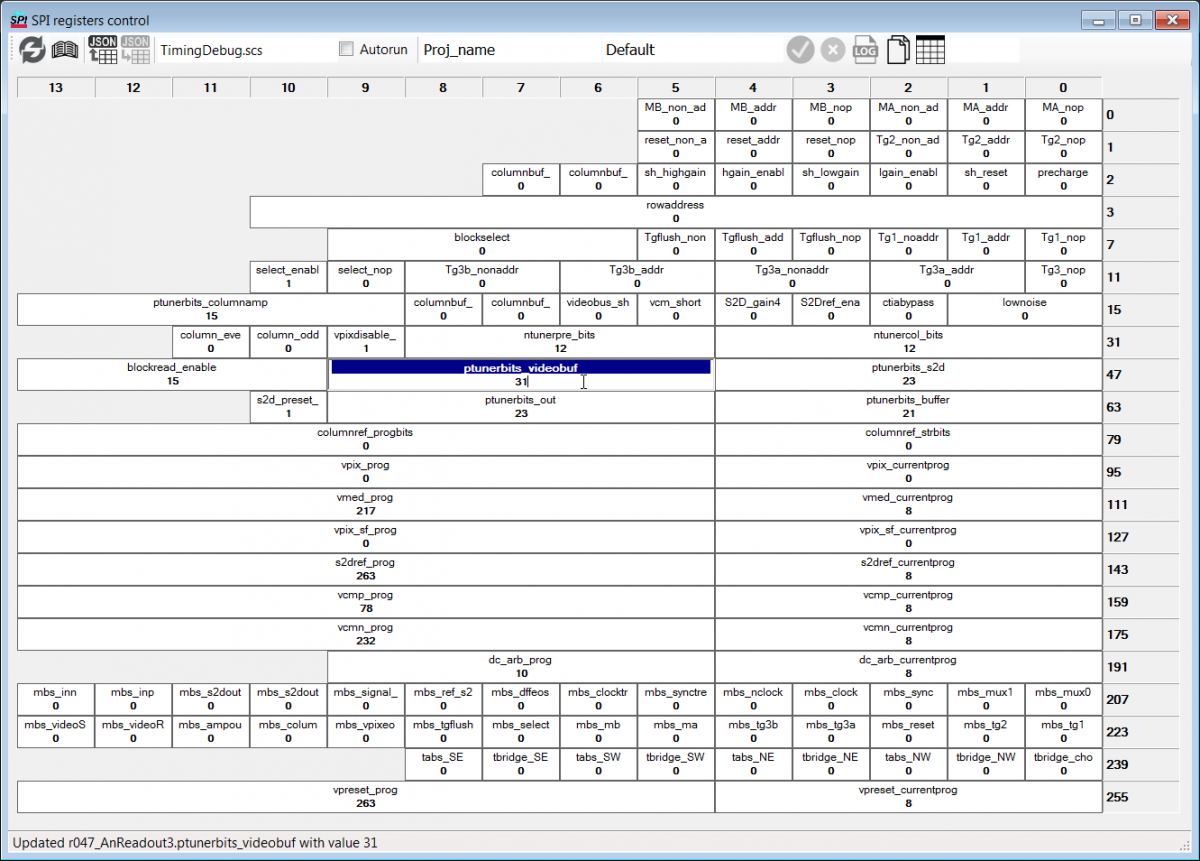
Приветствую! Для конфигурации ИМС используем набор регистров, доступных по интерфейсу SPI. Регистры бывают разной длины (как правило, не больше 14 бит), отдельные поля внутри регистров так же могут быть разной длины. Для первичного тестирования поведения чипа в статическом режиме я сделал форму, в которой содержимое отдельных полей каждого регистра может меняться на лету. Пример такой формы с картой регистров представлен на картинке ниже. Регистры расположены по вертикали, содержимое регистров (отдельных битовых полей) - по горизонтали. Внутри каждой ячейки отображено имя поля и его текущее значение. Принцип работы прост: оператор нажимает на ячейку, меняет значение, форма отсылает команду по SPI, оператор наблюдает, что происходит с ИМС и т.д. Для каждого проекта своя карта регистров, которая "подцепляется" к форме из JSON файла. Форма создавалась по-быстрому и, как это обычно бывает, так и осталась в первозданном виде. Хотелось бы сделать что-то более удобное или компактное, даже не знаю, что конкретно в этой не устраивает, но хочется, чтобы содержимое отображалось покомпактнее. Наверняка многие сталкивались с задачами удобного отображения конфигурации регистров. Буду рад, если кто-нибудь поделится своими или чужими визуальным решениями.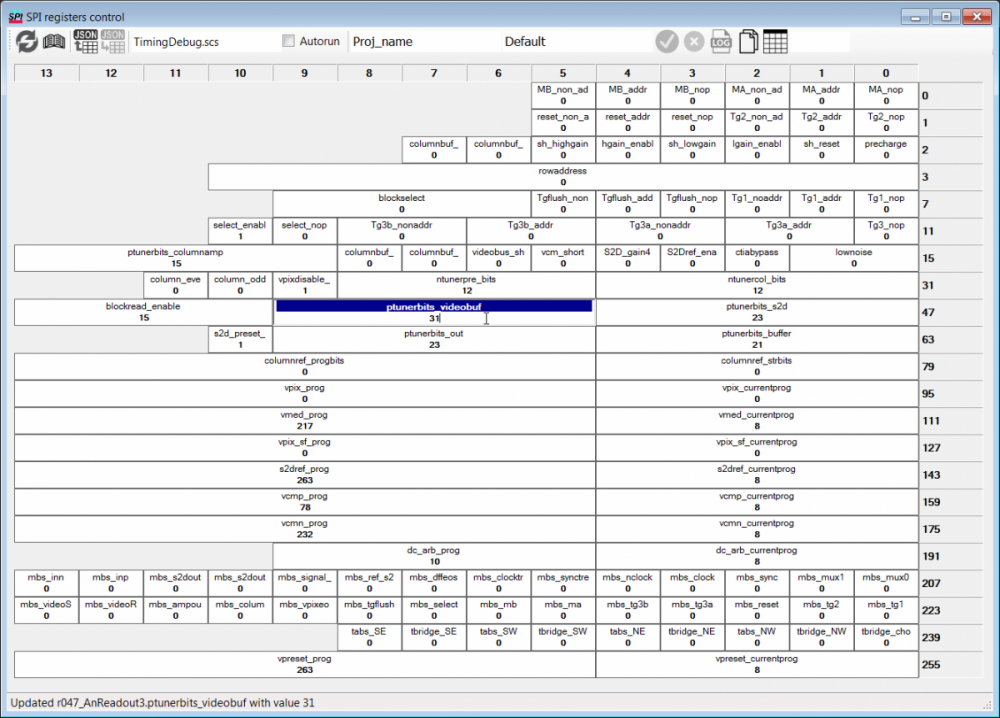
-
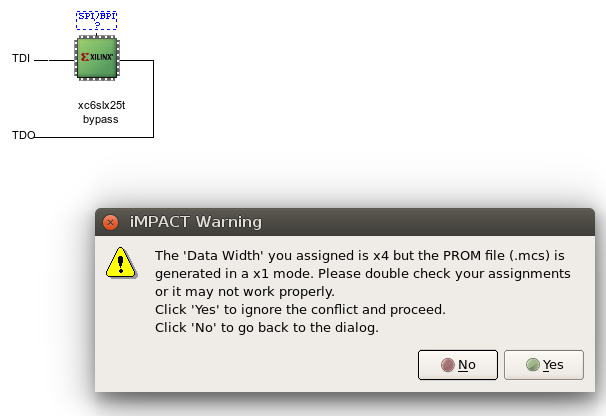
Есть плата, на которой Quad SPI Flash, и очень важно, чтобы оно работало именно в таком режиме - в x4, иначе плата стартует слишком долго и поэтому прошивка не работает. Для этого я пытался через GUI создать PROM файл в формате mcs, но так и не добился x4 mode. Пробовал и в командной строке создавать mcs через bash скрипт - есть опции spi_width 8/16/32, но 4 нет, но и на 8 при попытке назначить прошивку флэшки все равно про нее пишет что она x1. Что делать??? Может mcs формат не поддерживает x4 и нужно выбрать другой? Но нет, promgen поддерживает много форматов и опции общие для всех них. Еще один вопрос, а можно ли повысить частоту работы SPI флэшки при загрузке? Мне автор прошивки говорит, что дескать по дефолту она стартует на частоте 10 МГц, а можно сделать 20-25 МГц! Вот я не нашел, где же задать это. Да и странно это, как это возможно, разве при загрузке первых кусков прошивки оно там считает скорость, на которой грузить остальное?