juvf
-
Постов
1 611 -
Зарегистрирован
-
Посещение
-
Победитель дней
2
Весь контент juvf
-
Altium для новых начинающих
juvf ответил Uladzimir тема в Altium Designer, DXP, Protel
Могу. Создал класс, поместил туда цепи. А какое правило создавать? Ошибка такая [Clearance Constraint Violation] device1.PcbDoc Advanced PCB Clearance Constraint: Between Track (141.575mm,177.675mm)(142mm,178.1mm) Sig1 And Track (142mm,178.1mm)(146mm,182.1mm) Sig1 15:16:56 17.12.2010 19 правило сделал как на рисунке. Может я не то правило создаю?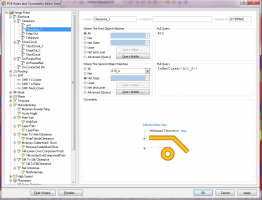
-
Altium для новых начинающих
juvf ответил Uladzimir тема в Altium Designer, DXP, Protel
:write: в схеме 2 цепи, объеденены через tainet. Физически это одна цепь. на пп две дорожки в одном слоес разними именми цепей сходятся в одной точке. DRC не проходит. Как настроить правила для таких дорожек?
-
Altium для новых начинающих
juvf ответил Uladzimir тема в Altium Designer, DXP, Protel
требуется в полигонах сделать разрез. Добавил Fill в слой KeepOut и получил в этом месте разрез в полигонах во всех слоях. Но теперь DRC не проходит. Не могу правила настроить. Как сделать чтоб DRC не ругался, если я дорожку через этот keepout протащю? Или если пад на keepout залез?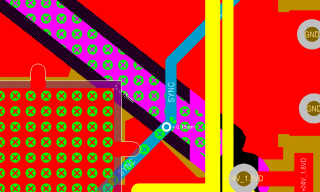
-
Altium для новых начинающих
juvf ответил Uladzimir тема в Altium Designer, DXP, Protel
Как узнать какое правило выдает ворнинг при компеляции проекта? Например [Warning] Compiler CPU.SchDoc MISO_FRAM contains IO Pin and Output Pin objects (Pin U1-AA3) 14:52:51 14.12.2010 1 [Warning] Compiler CPU.SchDoc Unconnected Pin U1-A11 at 460,795 14:52:51 14.12.2010 2 [Warning] Compiler CPU.SchDoc RS0_RO contains IO Pin and Output Pin objects (Pin U1-AB14) 14:52:51 14.12.2010 3 Не перевод этих предупреждений, а какое правило выдает эти предупреждения? Нашел на соседней вкладке, после того как отключил все правила на вкладке Error reporting.
-
Altium для новых начинающих
juvf ответил Uladzimir тема в Altium Designer, DXP, Protel
Открыл вашу пп. Не нашел я там антены как на вашем рисунке выше. Нашел всего одну антену, NetU2_5, ну её просто доразвести. Ругонь в районе Р5 тоже не нашел. Много ругони на другие вещи, на румы, на то что в некоторых переходках внутренний деаметр больше внешнего, на неразведённые цепи и т.п.
-
FAQ по Altium Designer
juvf ответил masterofnature тема в Altium Designer, DXP, Protel
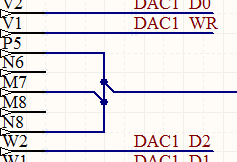
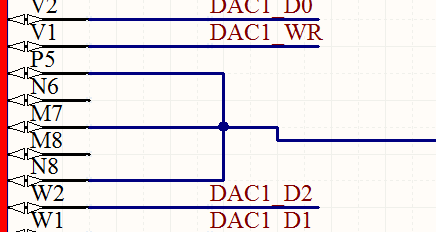
галочки нет - два незмкнутых проводника, галочка есть два соединения, физически это конечно один проводник, но УГО - два. мне нужно такое одно соединение
-
FAQ по Altium Designer
juvf ответил masterofnature тема в Altium Designer, DXP, Protel
Из чаво У меня, если установленна галочка, то соединение не сохраняется. А преобразуется в два соединения. Как сделать чтоб соединение сохранялось?