adnega
-
Постов
3 594 -
Зарегистрирован
-
Посещение
-
Победитель дней
3
Весь контент adnega
-
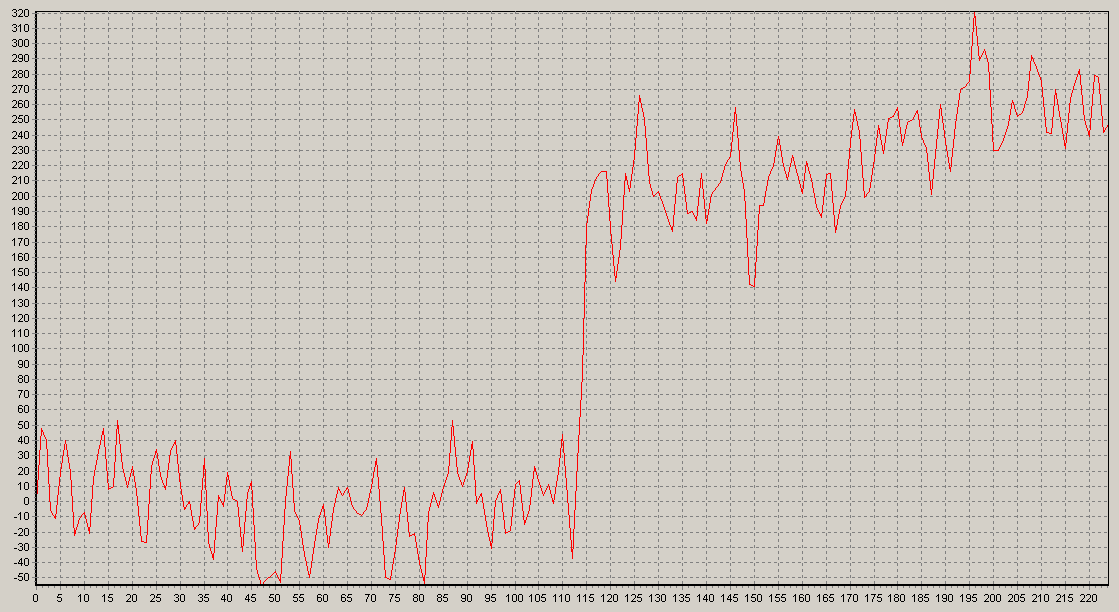
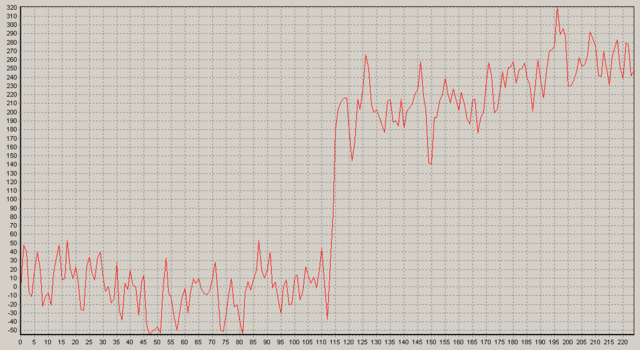
Видел обе эти статьи, и бегло не понял в чем проблема: - да есть зависимость значений от температуры? Но это определяется во многом сенсором, а не HX711. У меня в стенде дорогущий датчик силы - он страшно плывет от температуры. А дешевый китайский значительно меньше. - есть проблема на китайском модуле? Да, решил одним проводочком. У нас в стенде нужно определять момент касания очень точно. Ловим касание на уровне 4 грамм. Все довольны. Шум +-50 единиц. Ниже график: положили 1 грамм Датчик на 10 кг.
-
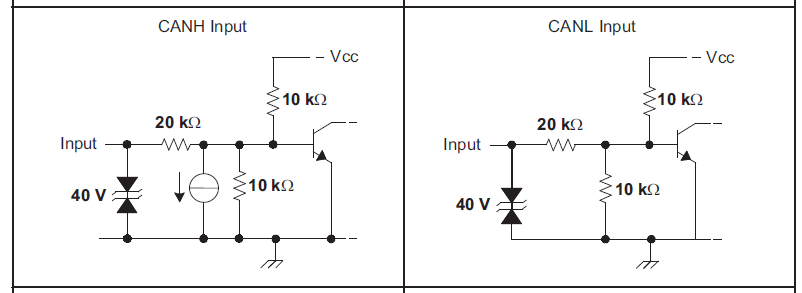
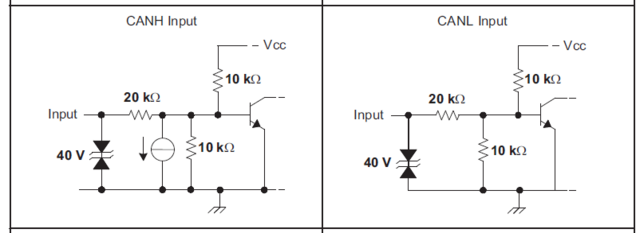
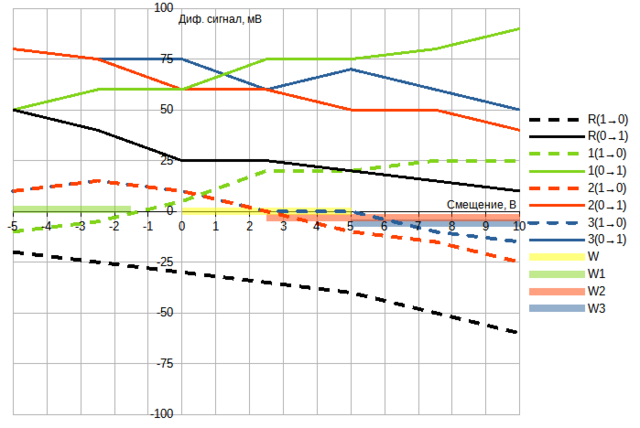
В CAN-стандарте конкретный физический уровень не определяется (только требования к нему). Но большинство физик в витую пару тянут CAN-H и CAN-L к середине напряжения питания Поэтому уровень там примерно в районе 2.5 В при питании 5В. В отличии от RS485 - шина без активных передатчиков летает безнаказанно от минус 7 до плюс 12 В. Недавно с такой же проблемой боролся: передатчик после стопового бита отпускал кратковременно шину. И одновременно с этим попались экземпляры ADM485, которые нулевое дифференциальное напряжение на входе устойчиво трактовали как лог. 0. Вот картинка по 4 образцам (R - это реф от надежного поставщика, 1-2-3 - какие-то "проблемные" ADM485) На вход B подавалось смещение (ось X) от -5 до +10В, а на входе A была пила от -2 до +2 В. Диф.сигнал по оси Y. Видно, что только экземпляр R имеет петлю гистерезиса включающую в себя нулевое дифференциальное смещение на всем интервале допустимых VCM. Т.е. только он не переключает выход приемника RXD, а сохраняет предыдущее значение. Для экземпляра 1 это условие выполняется при VCM меньше -2.5 В (зеленая жирная линия). Для экземпляра 2 это условие выполняется при VCM больше +2.5 В (красная жирная линия). Для экземпляра 3 это условие выполняется при VCM больше +5.0 В (синяя жирная линия). Обычно VCM в реальных системах находится в диапазоне 0 .. +5 В (желтая жирная линия). Т.е. экземпляр 2 иногда может паузы передатчика воспринимать за логическую 1, и обмен может вестись корректно, если VCM при этом будет по какой-то причине выше +2.5 В. Экземпляр 1 на рабочем диапазоне VCM всегда будет выдавать логический 0. Экземпляр 3 на рабочем диапазоне VCM от +2.5 В до +5.0В может сохранять логическую 1, и вести обмен корректно, но уровень переключения 1→0 настолько близок к нулю, что любая помеха может переключить приемник RXD. Я согласен, что нужно бороть протокольными методами (включать передатчик на какое время перед отправкой посылки) и/или добавлять несколько FF в начало. Но тут проблема, что передатчик "дурной", и ничего с этим не поделать. Были бы Phy с гистерезисом приемника, включающим 0 на входе (а еще лучше -200 мВ), но увы. Остается только растяжка.
-
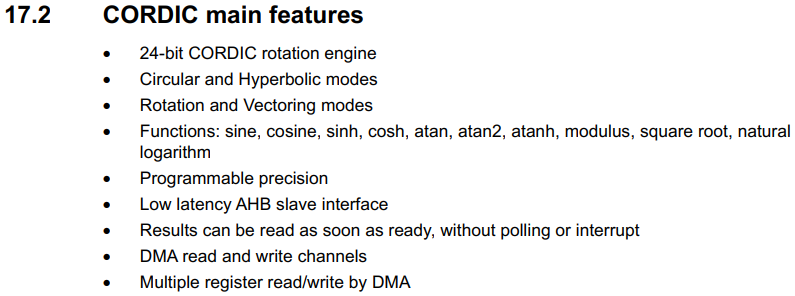
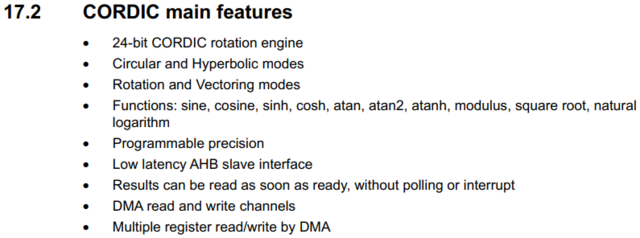
Обращаю внимание, что в G474 есть такой блок: Насколько я помню, он не сильно выигрывает в сравнении с обычным FPU по скорости, но, вроде, из жирных плюсов, что какую-то математику можно прогонять через DMA. Т.е. какую-то обработку можно делать аппаратно, а CPU+FPU доделывать основное. У ST есть IDE, на плате есть отладчик + UART поверх USB. По примерам можно легко стартануть. Документация хорошая, исходники немудренные, сообщество обширное. Для попробовать/эксперимент - милое дело.
-
Говорят, в NUCLEO-G474RE установлен МК с такой вот начинкой Другими словами: пять АЦП, при 12 битах до 4 Мвыб/с, до 42 каналов (причем можно в дифференциальном режиме). Больше вопросов вызывает способ такой поток куда-то передать.


- 21 ответ
-
- 1
-

-
Не шьется мега16
adnega ответил whale тема в В помощь начинающему
Может, с учетом 0 должно быть 127 ? -
Не шьется мега16
adnega ответил whale тема в В помощь начинающему
В коде тоже нужно повнимательнее посмотреть, т.к. что-то очень большая ошибка. Мож, при предделителе clkio/256 у вас TCNT отличается от нужного на 1. Попробуйте TCNT туда-сюда на единичку поменять. delta = 10 минут / сутки = ~ 6944 ppm. delta = 1 - ((32768 - 256) / 32768) = ~7812 ppm, что соответствует уходу 11 минут 15 секунд в сутки.