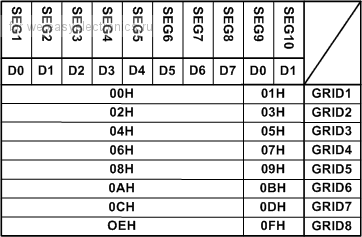
Вопрос, вот понравился мне TM1638, хочу подключить десять семисегментных индикаторов (10 разрядов). TM1638 тянет 8 по стандартной схеме подключения, где сегменты цепляются на SEG выходы, а разрядные общие точки (кстати обычно эта схема для общего катода, если правильно понял) цепляются на GRID. Если с точки зрения программы вроде как проблем больших не вижу, регистры вот так представлены:
Да надо перерабатывать каждый байт данных и раскидывать побитно в разные регистры для каждого разряда исходных данных, но в принципе реально. Смущает другое...
Во первых давайте разберемся, что пишут даташиты:
Segment output, P pipe open-drain output, если перевести на русский я так понял это P-канальный полевик, правда пишут что с "открытым коллектором" или стоком, если брать терминологию полевиков, но если вспомнить, что изначально TM1638 идут для общего катода, то SEG выходы получается должны иметь "открытый исток", то есть выдают вытекающий ток.
Grid output, N pipe open-drain output, тут вроде понятно - N-канальный полевик. цепляется на общий катод "открытым истоком" (коллектором, кому как понятнее), должен выдерживать достаточную токовую нагрузку, тк ток с сегментов суммируется.
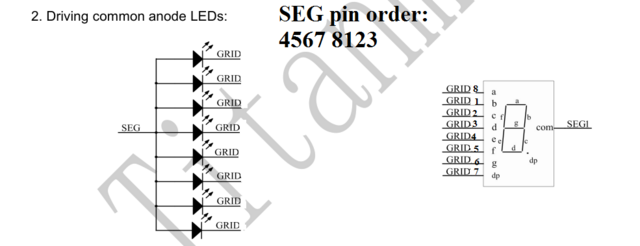
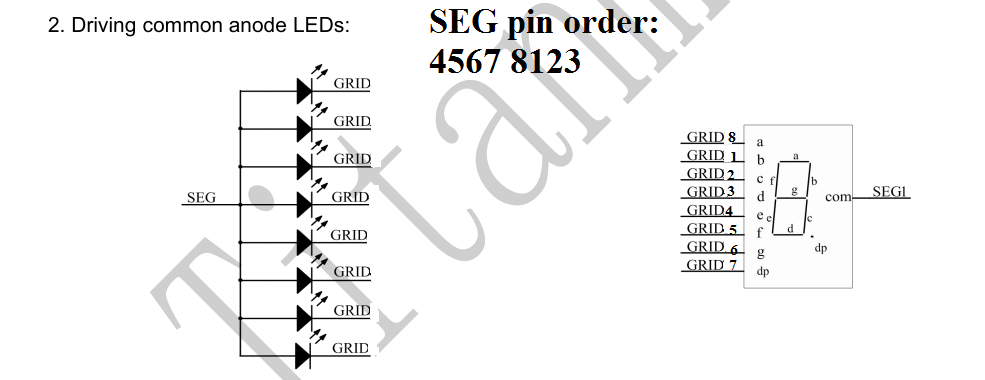
Вот выдержка из их даташита для общего анода.
Первое что смутило - токи, для выходов типа SEG указан максимальный ток -50 mA, для выходов типа GRID +200 mA, даже знаком показали вытекающий ток. Так вот вопрос к тем, кто работал с TM1638 - хватает ли этого тока, чтобы запитать целый индикатор? Ведь TM1638 используется без ограничительных резисторов и как он там подбирает ток мне не понятно, может требуется изначально занизить яркость?
Второй момент - питания, драйвер может работать и с 3,3В, но по даташиту всячески намекают брать питание 5В, может ему проще работается так...но для светодиодов типа синих, у которых напряжение включения больше других, говорят может не хватить 3,3В питания, ведь часть потеряется на ключе, плюс для разных светодиодов это значение может быть и побольше...в общем прошу отписаться тех, кто работал например с синими на низком напряжении - стоит или нет оставаться на 3,3В. Почему такой вопрос, потому как если использовать 5В, надо думать про согласование уровня, а это уже следующий вопрос, по нему ниже.
В третьем вопросе хочется обсудить выбор напряжения и схему согласования, в том числе по шине SPI.
Стандартно предлагается подтянуть к питанию ножки STB (chip select), CLK (clock), DIO (объединенная slave input/output) резистором 10кОм (от 1кОм до 10, но рекомендуют 10) и поставить фильтр-конденсатор на 100pF, если с DIO все понятно - там выход открытый коллектор (открытый сток), то по остальным ножкам не понятно зачем. Вопрос: а если я не буду этого делать, какие могут быть ньюансы? Пока это я обсуждаю вариант, если питание одинаковое и у МК и у драйвера. Если брать вариант, где питания МК 3,3В, а у драйвера 5В, начинается веселье: допустим ножки процессора толерантны к 5В (хотя даже если не торлерантны, но имеют защитные диоды, ограничивающие вход/выход питанием+-0,5В) имея подтяжку 10кОм ток будет незначительным и не должен диод вывести из строя, но напряжение на линии не поднимется до 5В, тк максимальное напряжение будет 3,3В за счет схемы с диодом. Что вход что выход, а напряжения включения на входах драйвера 1638 (который кстати тоже имеет защитные диоды судя по диапазону напряжения Logic input voltage -0.5 ~ VDD + 0.5 из даташита) составляет 0.7 VDD минимум и 0.3 VDD максимум (тут я боюсь опечатка, думаю 0.3 VDD минимум, иначе они не гарантируют вообще выключение, как и включение если брать там максимум - тоже опечатались).
Короче кто работал с TM1638 (может 1637 или аналогичными от этого производителя) как решили вопрос с согласованием напряжения.
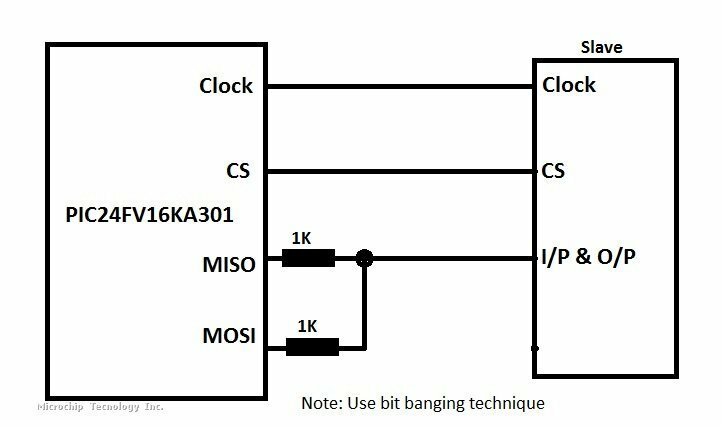
Отдельно стоит поговорить о том, как организуется подключение SPI, точнее согласование объединенного DIO и резделных MOSI и MISO?
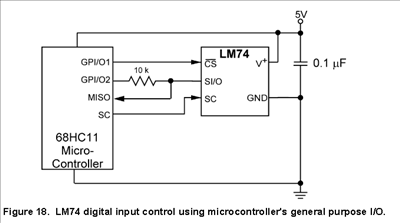
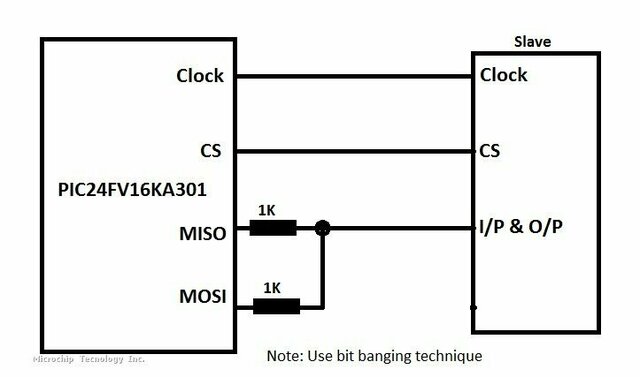
Стандартно многие предлагают использовать такие схемы для объединения стандартной SPI и трехпроводной (с объединенным I/O):
https://arduino.stackexchange.com/questions/23684/stpm10-using-arduino-spi-communication
https://microdigisoft.com/tm1638-8-bit-button-digital-led-seven-segment-display-module/
а так же https://web.archive.org/web/20230418064003/https://os.mbed.com/components/TM1638-LED-controller-80-LEDs-max-Keyboa/ и некоторые ныне недоступные в свободном доступе типа Texas Instr
Вопрос: что нам дает этот резистор/резисторы? Тем более что у нас на входе DIO будет стоять подтягивающий резистор 10кОм. Есть какие-то особенности работы ножки MOSI в режиме полудуплекса, раз ее так отсекают? Разве она не должна переходить в высокий импеданс?



")