artemkad
-
Постов
2 533 -
Зарегистрирован
-
Посещение
-
Победитель дней
12
Весь контент artemkad
-
Как склеить два пьезоэлемента ?
artemkad ответил whale тема в В помощь начинающему
Если нет усадки, клеящий компонент становится изолятором между проводящими зернами. Именно усадка заставляет зерна прижиматься и в процессе этого рвать на гранях застывающую пленку. -
FreeRTOS и другие, имеет ли смысл использовать?
artemkad ответил unix тема в ARM, 32bit
Сами STM свои МК делят на высокопроизводительные, широкого применения, малопотребляющие и беспроводные. Как их воспринимают потребители - неопределенный вопрос. -
А как по мне как раз тут возможно разночтение. Первый же вопрос - это размер в байтах или число элементов buf? Судя по названию - ожидается размер...
-
Кстати, стоит заметить почему 100pF - эти кондеры имеют частоту последовательного резонанса примерно в нижнем диапазоне GSM. Соответственно, он там работает наилучшим образом. При этом на верхнем диапазоне он работает хуже, но там и мощность передатчика в 2 раза ниже. А вот нарисованная в даташите "батарея" конденсаторов (10+33+10посл10+33посл33) как раз потому такая и нарисована, что там резонансы как на верхнем, так и на нижнем и на 2.4ГГц. Оно конечно правильнее, вот только занимает много места и как результат в схему влезают индуктивности соединяющих дорожек(1нГн на 1мм), что негативно сказывается на результате.
- 61 ответ
-
- 2
-

-

-
Значит главная причина - попадание GSM-сигнала внутрь микрофона с последующим детектированием его на внутреннем полевике. После чего сигнал становится неотличимым от родного и все дальнейшие фильтры его успешно пропускают.
- 61 ответ
-
- 1
-
-
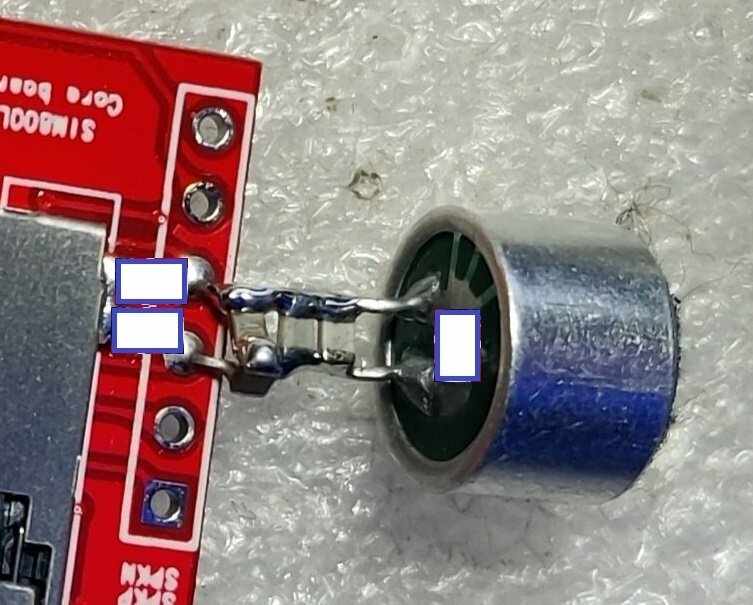
Это плохое решение. На частотах 800+МГц лучше использовать NP0, а помимо этого частота последовательного резонанса 220пФ находится ниже 700МГц отчего его ESR в нижнем диапазоне GSM раза в 3 хуже чем у 100pF , а потому последовательно 2x220пФ в разы хуже одного 100pF. Даже просто один 220pF лучше последовательно включенных. Можете впаять 100pF один на контакты на самом микрофоне(не на выводы, а на контакты к которым они припаяны) и два между массой контакта SIM-карты и контактами MIC+ и MIC- на плате - примерно как на рисунке
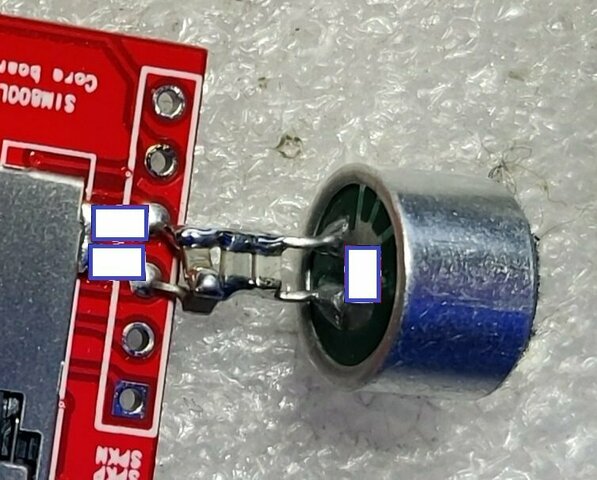
- 61 ответ
-
- 1
-