khach
-
Постов
5 267 -
Зарегистрирован
-
Посещение
-
Победитель дней
8
Весь контент khach
-
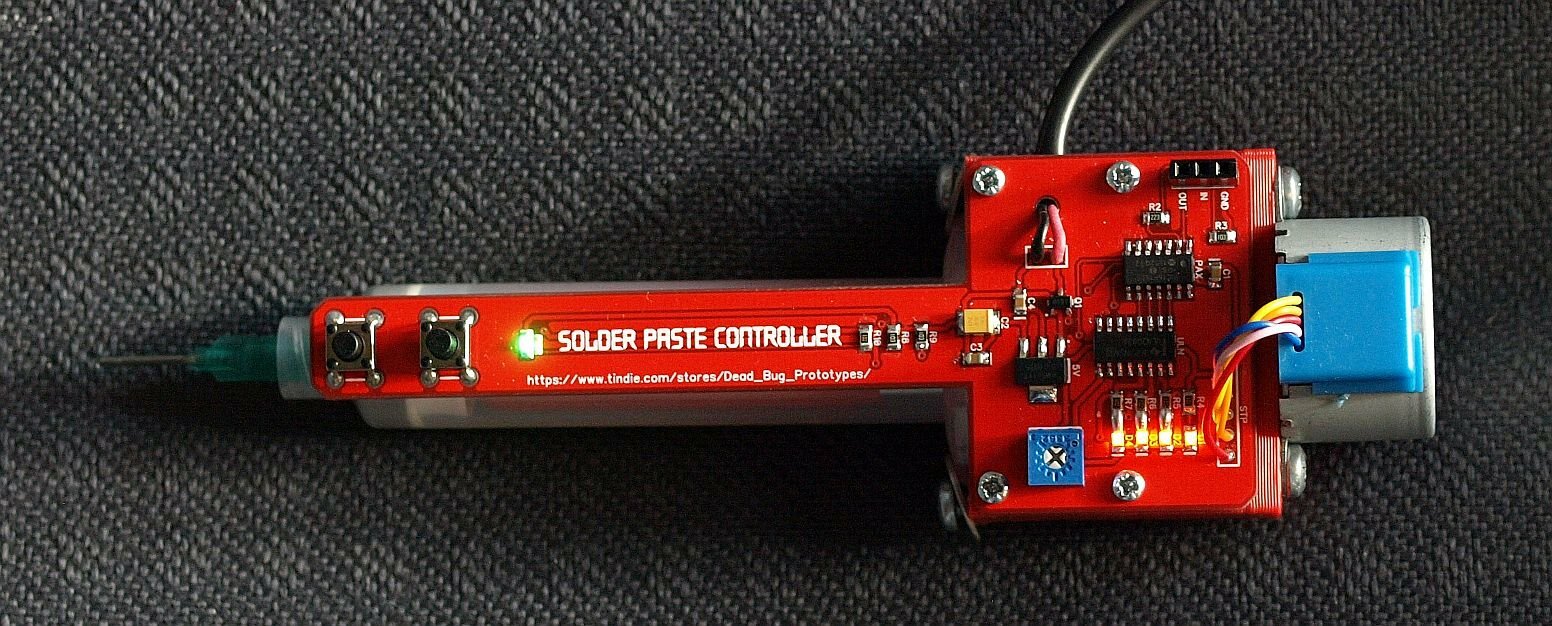
А может ли кто опознать чип радарный из новых VEGAPULS 6X? Вроде VEGA ушли на 80 ГГц с этим чипом и утверждают что сенсор намного проще и надежнее чем старые 24 и 6 ГГц.
-
Физика ( полная модель) это все таки слишком, да и недостижимо часто в реале. Тот же DJI подвес- положение центра масс камеры и ее моменты инерции по осям могут достаточно сильно варьироваться, но работать гимбал будет. А вот при металообработке иногда ничего кроме червяка, иногда двойного для устранения люфтов по мере износа червяка автоматикой, не помогало. Еще в металлообработке вылазила интересная проблема- например произвольные углы можно ставить с точностью 30 угловых минут, но перпендикуляры надо ставить ставить уже с точностью в угловые секунды, иначе точность станка по древним гостам не обеспечивалась. И тут начинались пляски с бубном типа двойной обратной связи по углам- обычной точности на весь круг и высокоточной на углы близкие к 90 градусам.
-
Управление газовой форсункой
khach ответил const тема в Схемотехника
Тут еще вопрос как этот ключ управляется. В древних схемах там было аналоговое управление-просто стабилитрон, который приоткрывал транзистор ( биполярный) при достижении нужного уровня напряжения самоиндукции и транзистор тупо рассеивал энергию в тепло. Потом начали применять одновибратор, который открывал транзистлор через некоторое время после закрытия форсунки, это время выставлялось в зависимости от индуктивности обмотки и было разное для разных типов форсунок. В самых новых схемах на этот ключ выделили отдельный канал ШИМ таймера, синхронизированный с ШИМ каналом таймера нижнего ключа форсунки. С измерением профиля тока при открывании- закрывании форсунки и адаптивным алгоритмом управления.
-
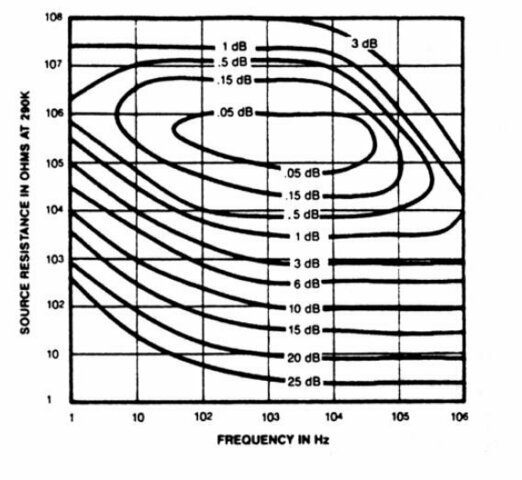
Когда шум действиельно важен, то в документации рисуют noise contour двумерный. Вот например от SRS SR560
-
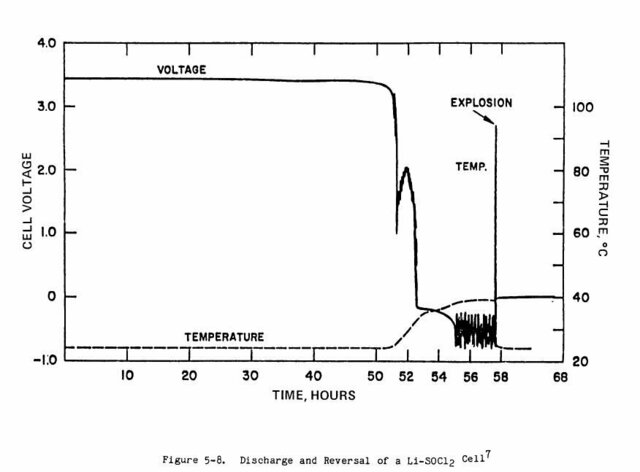
Ну как то так https://ntrs.nasa.gov/api/citations/19870007963/downloads/19870007963.pdf Там немного про реверсинг есть- обычно в конце графика бабах.
-
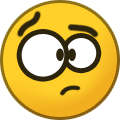
Дык это, с моторчиком оно намного лучше, особенно если мотор с энкодером.