Поиск
Показаны результаты для тегов 'can'.
-
Не работает колбек CAN
RodionPI опубликовал тема в ARM, 32bit
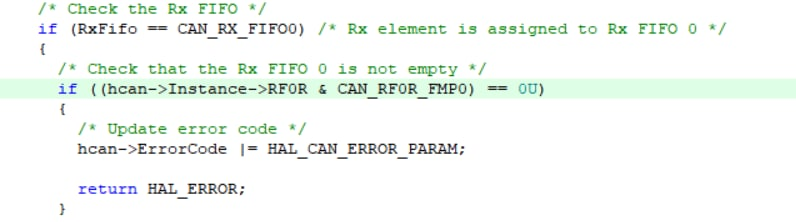
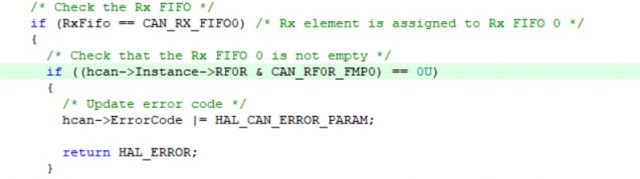
Добрый вечер, настроена база для передачи информации по сети CAN. не работает простой колбек (помигать светодиодом при получении сообщения) . Если смотреть при отладке код вылетает из if как я понял в моменте проверки на наличие инфы в FIFO. Rx data после отправки сообщения остается пустым. Буду благодарен за любой совет, готов ответить на конкретизирующие вопросы. /* Private variables ---------------------------------------------------------*/ ADC_HandleTypeDef hadc; CAN_HandleTypeDef hcan; TIM_HandleTypeDef htim1; /* USER CODE BEGIN PV */ CAN_TxHeaderTypeDef TxHeader; CAN_RxHeaderTypeDef RxHeader; uint32_t TxMailbox = 0; uint8_t TxData[8] = {0,}; uint8_t RxData[8] = {0,}; CAN_FilterTypeDef sFilterConfig; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_ADC_Init(void); static void MX_CAN_Init(void); static void MX_TIM1_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_ADC_Init(); MX_CAN_Init(); MX_TIM1_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_Base_Start(&htim1); HAL_CAN_Start(&hcan); TxHeader.ExtId = 0; TxHeader.RTR = CAN_RTR_DATA; TxHeader.IDE = CAN_ID_STD; TxHeader.DLC = 8; TxHeader.TransmitGlobalTime = ENABLE; HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING | CAN_IT_ERROR | CAN_IT_BUSOFF | CAN_IT_LAST_ERROR_CODE); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) > 0) { TxHeader.StdId = 0x0378; for (uint8_t i = 0; i < 8; i++) { TxData[i] = i; } } HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox); HAL_Delay(500); HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData); if(HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK) { HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_SET); HAL_Delay(50); HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_RESET); } HAL_Delay(500); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } ....описание функицй static void MX_CAN_Init(void) { /* USER CODE BEGIN CAN_Init 0 */ /* USER CODE END CAN_Init 0 */ /* USER CODE BEGIN CAN_Init 1 */ /* USER CODE END CAN_Init 1 */ hcan.Instance = CAN; hcan.Init.Prescaler = 4; hcan.Init.Mode = CAN_MODE_NORMAL; hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_8TQ; hcan.Init.TimeSeg2 = CAN_BS2_7TQ; hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = DISABLE; hcan.Init.AutoWakeUp = DISABLE; hcan.Init.AutoRetransmission = DISABLE; hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN CAN_Init 2 */ sFilterConfig.FilterBank = 0; sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; sFilterConfig.FilterIdHigh = 0x0000; sFilterConfig.FilterIdLow = 0x0000; sFilterConfig.FilterMaskIdHigh = 0x0000; sFilterConfig.FilterMaskIdLow = 0x0000; sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; sFilterConfig.FilterActivation = ENABLE; sFilterConfig.SlaveStartFilterBank = 14; /* USER CODE END CAN_Init 2 */ } void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) { if(HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK) { HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_SET); HAL_Delay(50); HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_RESET); HAL_Delay(50); } }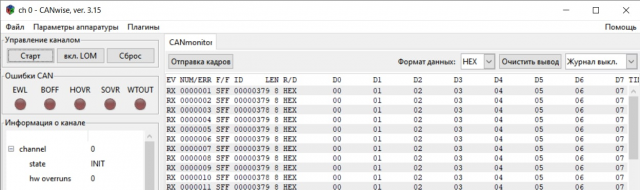
-
Имеем частотный преобразователь для погрузчика с выходом на управляющую шину CAN (ремонт/подъемник). На периферийном блоке (железный "тазик") расположен разъем, физически - круглый, в металлическом корпусе, 4-пин с 1 ключем, вилка. Диаметр наружной резьбы 12 мм. (?) 1. Если ли стандарт на подключение такими разъемами в промышленном/авто секторе ? (?) 2. Стандартизация на распиновку. Прозвонил, получилось 1-CAN_x 2-CAN_y 3-POWER(+) 4-POWER(-) (?) 3. Питание, которое идет по линиям . Есть ли стандарт на уровень напряжения и максимальный ток ? ps Буду благодарен, если кто подскажет производителя-марку-код подходящих разъемов. гуглом, digikey итп владеем, временем (и кольцами ) - нет


-
Error frames на шине
Polaris опубликовал тема в Controller Area Network (CAN)
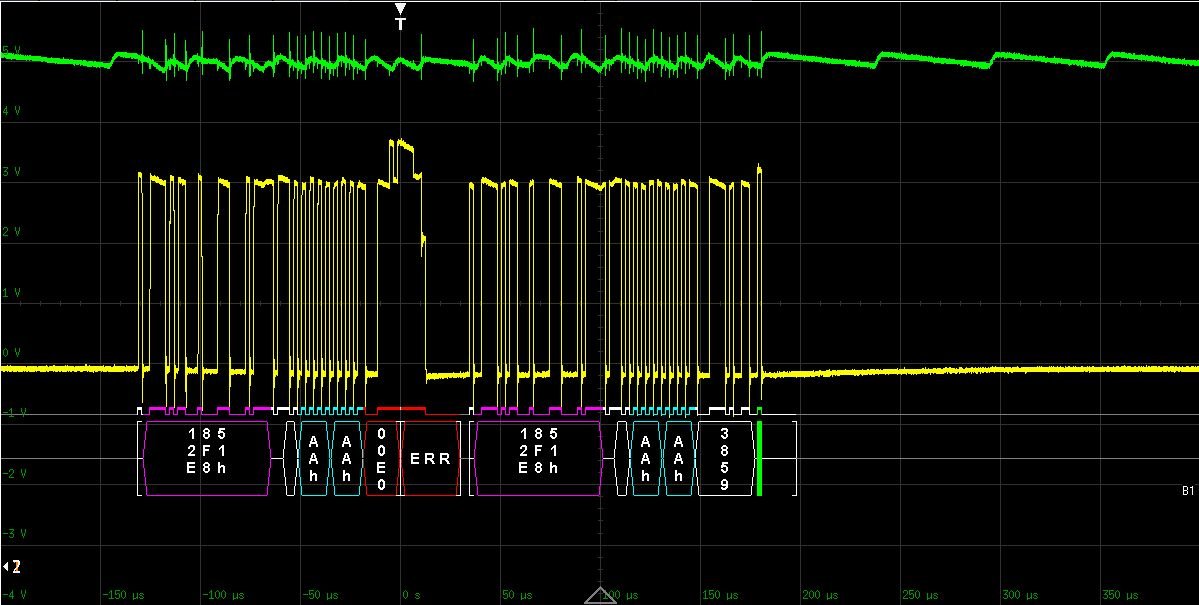
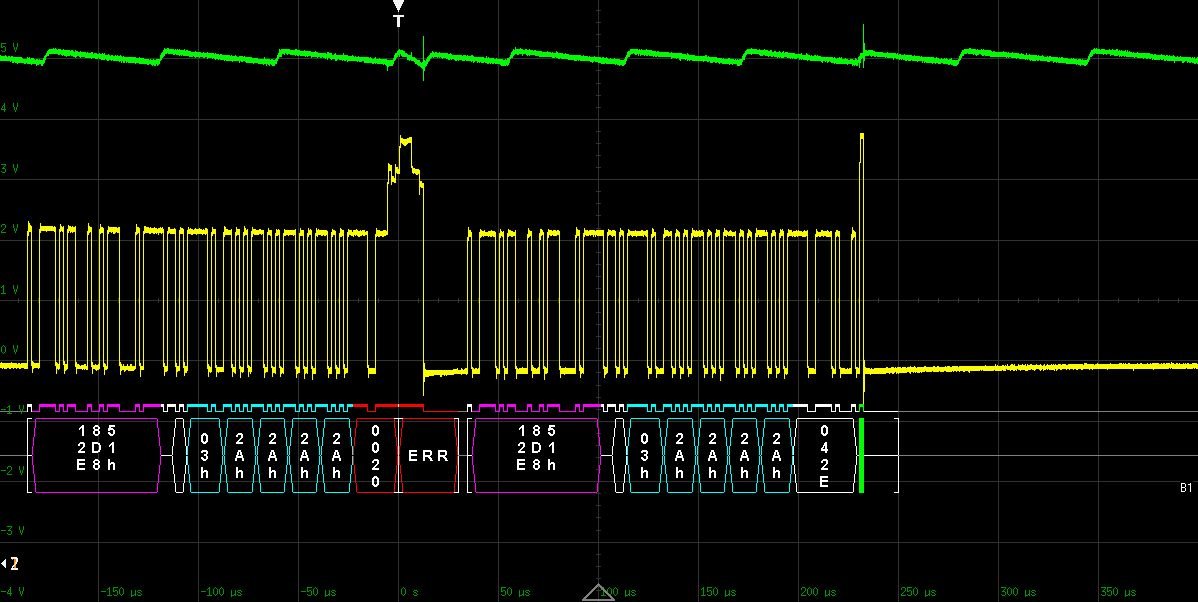
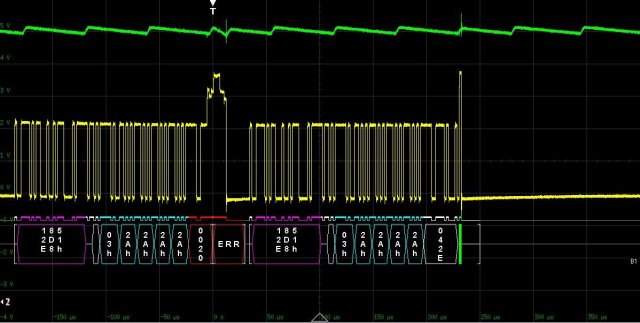
Занимаюсь реализацией самописного протокола для CAN на ATSAMC21, в целом все понятно и четко, скорость работы - 500 кбит/с. Для отладки и управления со стороны компьютера использую CAN-USB адаптер от Kvaser. Вроде бы все работало, начал смотреть, что там происходит на шине и обнаружил достаточно большое количество Error frames. Причем обнаруживаются они только в том случае, когда на шине более одного участника. Если к адптеру подключена одна плата - все хорошо, подключаешь вторую - до одного процента пакетов испорчены. Выглядит это вот так: Зеленый канал - это состояние питания микроконтроллера, желтый - сама шина. Второй участник при этом совершенно точно ничего не передает, я специально становился в отладке на функцию передачи - она ни разу не вызывалась. Кабель достаточно короткий, с обеих сторон терминирован 120 Ом. Как видно из скриншотов, выброс связан с искажение бита ACK, но кто это может делать - я совершенно не понимаю. Фильтры на участниках настраивал и таким образом, чтобы отбрасывать чужие пакеты, ничего не дало, в принципе, и не должно было дать, это же ACK. Что бы это могло быть?

-
stm32f103c8t6 + CAN + Hard Fault
Koteyk0o опубликовал тема в ARM, 32bit
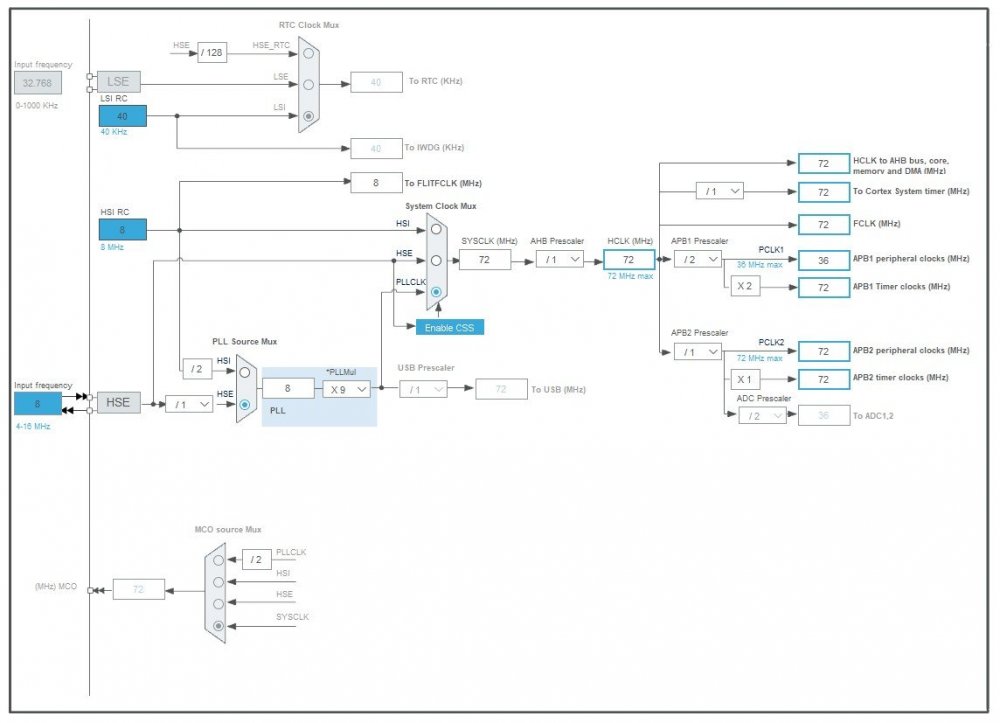
Всем привет Использую stm32f103c8t6 в связке с MCP2551, с другой стороны к нему подключен CAN Shield для Arduino, чтобы ловить пакеты. При включении со стороны STM32 приходят 2 пустых пакета с заголовком (насколько я понимаю) После этого STM32 уходит в Hard Fault, тактирование я вроде бы настроил правильно, кванты времени выставил для скорости 500 кбит Код генерировал в STM32CubeMX, а отладку провожу в Keil uVision5 Честно говоря это мои первые попытки работы с CAN протоколом, да и до этого я с STM32 не работал, но похоже я что-то делаю не так #include "main.h" CAN_HandleTypeDef hcan; void SystemClock_Config(void); static void CAN_Data_Send(void); static void MX_GPIO_Init(void); static void MX_CAN_Init(void); void CAN_Data_Send(void){ CAN_TxHeaderTypeDef Tx_Header; Tx_Header.StdId = 0x201; Tx_Header.IDE = CAN_ID_STD; Tx_Header.RTR = CAN_RTR_DATA; Tx_Header.DLC = 0x08; uint8_t Tx_Data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08}; HAL_CAN_AddTxMessage(&hcan, &Tx_Header, Tx_Data, (uint32_t *)CAN_TX_MAILBOX0); } int main(void){ HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_CAN_Init(); while (1){ HAL_Delay(500); CAN_Data_Send(); HAL_GPIO_TogglePin(GPIOC, CAN_Error_LED_Pin); } } void SystemClock_Config(void){ RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){ Error_Handler(); } RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){ Error_Handler(); } } static void MX_CAN_Init(void){ hcan.Instance = CAN1; hcan.Init.Prescaler = 9; hcan.Init.Mode = CAN_MODE_NORMAL; hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_4TQ; hcan.Init.TimeSeg2 = CAN_BS2_3TQ; hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = DISABLE; hcan.Init.AutoWakeUp = ENABLE; hcan.Init.AutoRetransmission = ENABLE; hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan) != HAL_OK){ Error_Handler(); } } static void MX_GPIO_Init(void){ GPIO_InitTypeDef GPIO_InitStruct = {0}; __HAL_RCC_GPIOC_CLK_ENABLE(); __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); HAL_GPIO_WritePin(CAN_Error_LED_GPIO_Port, CAN_Error_LED_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(LED_Output_GPIO_Port, LED_Output_Pin, GPIO_PIN_RESET); GPIO_InitStruct.Pin = CAN_Error_LED_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(CAN_Error_LED_GPIO_Port, &GPIO_InitStruct); GPIO_InitStruct.Pin = Button_1_Pin|Button_2_Pin; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.Pin = LED_Output_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(LED_Output_GPIO_Port, &GPIO_InitStruct); } void Error_Handler(void){ }