Поиск
Показаны результаты для тегов 'rx'.
-
Не работает колбек CAN
RodionPI опубликовал тема в ARM, 32bit
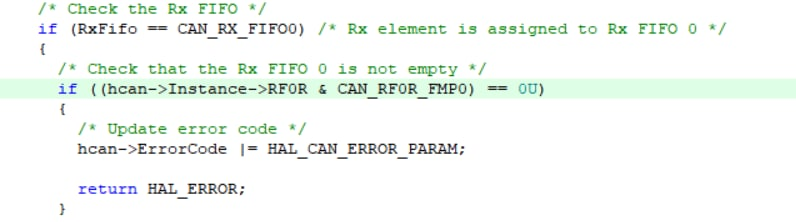
Добрый вечер, настроена база для передачи информации по сети CAN. не работает простой колбек (помигать светодиодом при получении сообщения) . Если смотреть при отладке код вылетает из if как я понял в моменте проверки на наличие инфы в FIFO. Rx data после отправки сообщения остается пустым. Буду благодарен за любой совет, готов ответить на конкретизирующие вопросы. /* Private variables ---------------------------------------------------------*/ ADC_HandleTypeDef hadc; CAN_HandleTypeDef hcan; TIM_HandleTypeDef htim1; /* USER CODE BEGIN PV */ CAN_TxHeaderTypeDef TxHeader; CAN_RxHeaderTypeDef RxHeader; uint32_t TxMailbox = 0; uint8_t TxData[8] = {0,}; uint8_t RxData[8] = {0,}; CAN_FilterTypeDef sFilterConfig; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_ADC_Init(void); static void MX_CAN_Init(void); static void MX_TIM1_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_ADC_Init(); MX_CAN_Init(); MX_TIM1_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_Base_Start(&htim1); HAL_CAN_Start(&hcan); TxHeader.ExtId = 0; TxHeader.RTR = CAN_RTR_DATA; TxHeader.IDE = CAN_ID_STD; TxHeader.DLC = 8; TxHeader.TransmitGlobalTime = ENABLE; HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING | CAN_IT_ERROR | CAN_IT_BUSOFF | CAN_IT_LAST_ERROR_CODE); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { if(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) > 0) { TxHeader.StdId = 0x0378; for (uint8_t i = 0; i < 8; i++) { TxData[i] = i; } } HAL_CAN_AddTxMessage(&hcan, &TxHeader, TxData, &TxMailbox); HAL_Delay(500); HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData); if(HAL_CAN_GetRxMessage(&hcan, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK) { HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_SET); HAL_Delay(50); HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_RESET); } HAL_Delay(500); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } ....описание функицй static void MX_CAN_Init(void) { /* USER CODE BEGIN CAN_Init 0 */ /* USER CODE END CAN_Init 0 */ /* USER CODE BEGIN CAN_Init 1 */ /* USER CODE END CAN_Init 1 */ hcan.Instance = CAN; hcan.Init.Prescaler = 4; hcan.Init.Mode = CAN_MODE_NORMAL; hcan.Init.SyncJumpWidth = CAN_SJW_1TQ; hcan.Init.TimeSeg1 = CAN_BS1_8TQ; hcan.Init.TimeSeg2 = CAN_BS2_7TQ; hcan.Init.TimeTriggeredMode = DISABLE; hcan.Init.AutoBusOff = DISABLE; hcan.Init.AutoWakeUp = DISABLE; hcan.Init.AutoRetransmission = DISABLE; hcan.Init.ReceiveFifoLocked = DISABLE; hcan.Init.TransmitFifoPriority = DISABLE; if (HAL_CAN_Init(&hcan) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN CAN_Init 2 */ sFilterConfig.FilterBank = 0; sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; sFilterConfig.FilterIdHigh = 0x0000; sFilterConfig.FilterIdLow = 0x0000; sFilterConfig.FilterMaskIdHigh = 0x0000; sFilterConfig.FilterMaskIdLow = 0x0000; sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0; sFilterConfig.FilterActivation = ENABLE; sFilterConfig.SlaveStartFilterBank = 14; /* USER CODE END CAN_Init 2 */ } void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan) { if(HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK) { HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_SET); HAL_Delay(50); HAL_GPIO_WritePin(Led2_GPIO_Port,Led2_Pin, GPIO_PIN_RESET); HAL_Delay(50); } }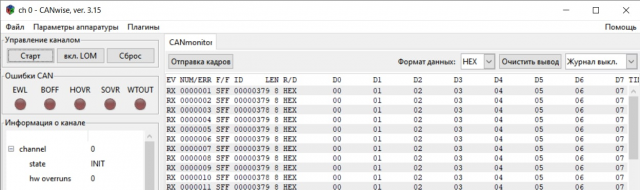
-
Здравствуйте, подскажите какой лазер и фотоприемник используется в медиаконвертере (оптика <--> Ethernet)? ИК, УФ или обычный (видимый) спектр? Например таком: Спасибо, с уважением.