Для начала я бы рекомендовал собрать виртуальную модель в Simulink с применением библиотеки SimPowerSystems.
Возможно Вам помогут эти книги "Модельное проектирование электромеханических мехатронных модулей движения в среде SimInTech" лежит здесь и "Виртуальные лаборатории полупроводниковых систем в среде Matlab-Simulink", лежит здесь.
На мой взгляд индивидуальный привод протягивания ленты и намотки защитной пленки не получится по причине взаимного расположения питателей. В ширину 8 мм такую конструкцию дешево вместить не выйдет. Могу предложить для решения п.1 ввести сухое трение на отдающем барабане. Для п.2 доработать штырь, чтобы заходил в более чем 1 отверстие, типа вилки. П.3. наоборот, снизить трение в месте где защитная пленка меняет направление на180 градусов.
Интересуюсь, так сказать о намерениях, ищу доступную замену для Matlab. Целевая аудитория BIM на форумах по электронике редко тусит, поэтому простите, интересуюсь по своей теме.
Уважаемый(мая) Paola Shar!
Есть ли в планах выпустить ПО сопоставимое по функционалу с матлаб/симулинк? Чтобы не так дорого и с бесплатным/не сильно дорогим вариантом для студентов и частных лиц.
Из описания я понял что напряжение шины DC планируется 48 вольт. Не знаю структурной схемы всей системы, может нарисуете, так будет понятнее всем сторонам.
ТСу, для простоты понимания, представьте что АКБ в системе нет (вероятность такого события на реальной системе ненулевая). Есть силовая шина постоянного тока. Несколько источников (сетевой инвертор, ветрогенератор и т.д.) и один потребитель (выходной инвертор). Ваша задача регулированием выходного напряжения сетевого инвертора поддерживать равенство сумм входящих токов и выходящего тока силовой шины. С точки зрения ТАУ получается следящая система.
Коллега, что мешает Вам освоить специальное ПО, например LTSpice, Electronics Workbench и им подобные? Во первых, эксперименты позволят не жечь элементы схем. Во вторых, появится возможность увидеть скорости нарастания токов и напряжений, чтобы оценить возможности АЦП МК, которым Вы предполагаете управлять источником питания.
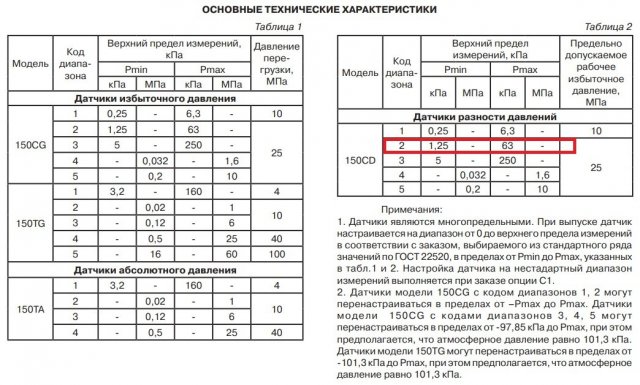
Я тоже прикинул уровень ваших разработок, если заполнить опросный лист и отправить на завод изготовителя большая проблема. Оборудование (судя по рабочему давлению, оно относится к "сосудам работающим под давлением") и следовательно поднадзорное, и должно быть сертифицировано. Датчик является перенастраеваемым через встроенную клавиатуру или HART коммуникатор. На картинке даже написаны пределы перенастройки.
У датчика 2 линии подвода давления которые давят на измерительную мембрану с двух сторон. Если в верхней точке отбора давления допустим 20МПа, то в нижней 20МПа + столб жидкости, допустим 3кПа. Датчик измеряет именно разность давления между линиями, т.е. 3 кПа. Так доходчиво?
Herz, датчик дифф. давления, который я привел допускает избыточное 25 МПа, самая правая колонка.
А диапазон измерения 63кПа, что в 10 раз выше, но допустимо для измерения уровня жидкости в резервуаре.