jcxz
-
Постов
13 478 -
Зарегистрирован
-
Посещение
-
Победитель дней
34
Весь контент jcxz
-
Не совсем. Если trap генерируется программный (например: в результате проверки каких-то переменных в программе обнаружено их недопустимое состояние), то делается вызов trap() (это не макрос и не функция в обычном виде, это возбуждение прерывания SVC, оформленное в виде функции (IAR умеет такое)). Внутри ISR SVC защёлкивается в ОЗУ дамп = id_trap+аргументы+регистры+стек, потом делается реинит всей периферии и CPU с активацией только нужной для trap-режима. МК можно рестартовать или не рестартовать. Главное - отключить все работающие DMA и перевести все интерфейсы работающие с внешней периферией в дефолтное выключенное состояние (выключить питание моторов, отключить Ethernet, USB, CAN и т.п.). Если trap не программный, а вход в ловушку идёт из ISR HF или ISR MPU или ISR шинных ошибок или ошибок чётности памяти (и т.п.), которые сами являются по факту событиями ошибки, то симулируется как будто была получена SVC (повышение приоритета прерывания до максимума и т.д.), и содержимое регистров и стека берётся таким, каким оно было до входа в этот ISR (HF, MPU, ...) Чтобы причина trap указывала на причину, вызвавшую исходный ISR, а не на код внутри ISR. Также для HF декодируется причина fault-а (по соответствующим регистрам), и эта инфа передаётся как номер и аргументы trap(). Для таких ловушек у меня есть целый класс номеров: #define TRAP_EXC_HARD 0x100 //исключение Hard Fault (неуточнённое) #define TRAP_EXC_HARD_VECTTBL 0x101 //ошибка при попытке считать содержимое таблицы векторов прерываний #define TRAP_EXC_HARD_FORCED 0x102 //произошла эскалациЯ прерываниЯ до HardFault (исходный fault неизвестен) #define TRAP_EXC_MPU 0x110 //MEMORY MANAGER FAULT (неуточнённое) #define TRAP_EXC_MPU_IERR 0x111 //MM FAULT: нарушение прав доступа к коду #define TRAP_EXC_MPU_DERR 0x112 //MM FAULT: нарушение прав доступа к данным #define TRAP_EXC_MPU_MUSTKE 0x113 //MM FAULT: при выходе из обработчика прерываниЯ возникло порождённое прерывание MemFault #define TRAP_EXC_MPU_MSTKE 0x114 //MM FAULT: при входе в обработчик прерываниЯ возникло порождённое прерывание MemFault #define TRAP_EXC_MPU_LSPE 0x115 //MM FAULT: при отложенном сохранении состоЯниЯ FPU возникла ошибка #define TRAP_EXC_BUS 0x120 //BUS FAULT (неуточнённое) #define TRAP_EXC_BUS_IBUS 0x121 //BUS FAULT: ошибка при попытке выборки инструкции #define TRAP_EXC_BUS_PRECISE 0x122 //BUS FAULT: точнаЯ ошибка при обращении к данным #define TRAP_EXC_BUS_IMPRECISE 0x123 //BUS FAULT: неточнаЯ ошибка при обращении к данным #define TRAP_EXC_BUS_USTK 0x124 //BUS FAULT: при попытке выхода из обработчика прерываниЯ #define TRAP_EXC_BUS_STK 0x125 //BUS FAULT: при попытке входа в обработчик прерываниЯ #define TRAP_EXC_BUS_LSPE 0x126 //BUS FAULT: при отложенном сохранении состоЯниЯ FPU #define TRAP_EXC_USAGE 0x130 //USAGE FAULT (неуточнённое) #define TRAP_EXC_USAGE_DIV0 0x131 //USAGE FAULT: попытка делениЯ на 0 #define TRAP_EXC_USAGE_UNALIGN 0x132 //USAGE FAULT: попытка невыровненного доступа к памЯти #define TRAP_EXC_USAGE_NOCP 0x133 //USAGE FAULT: попытка доступа к отсутствующему или отключенному сопроцессору #define TRAP_EXC_USAGE_INVPC 0x134 //USAGE FAULT: ошибочное значение в EXC_RETURN #define TRAP_EXC_USAGE_INVSTAT 0x135 //USAGE FAULT: попытка выполнениЯ инструкции при неверном значении бита T или полЯ IT регистра EPSR #define TRAP_EXC_USAGE_UNDEF 0x136 //USAGE FAULT: попытка выполнить неизвестную или привилегированную инструкцию у некоторых ещё есть аргументы. Вообще типичное содержимое trap.h из текущего проекта: А зачем его воспроизводить? Адрес есть, значит можно встать на этот адрес и проанализировать, что там не так. А дальше действовать по обстоятельствам.
-
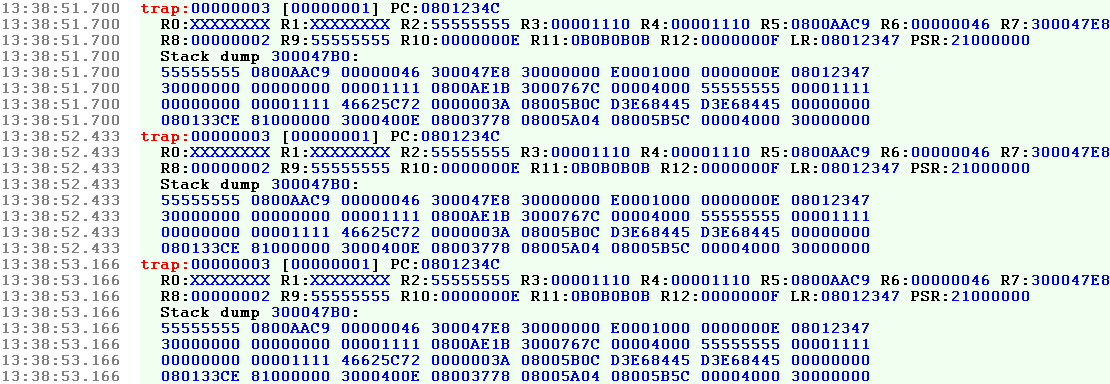
При возникновении критической ошибки (такой ошибки, выполнение программы после которой невозможно), все мои прошивки переходят в режим ловушки (trap): Запоминается номер trap, его аргументы, состояние регистров CPU и вершины текущего стека (это контекст trap); делается сброс всей периферии (возможно - с переключением CPU на более низкую частоту; а возможно и со сбросом всего устройства), инициализируется только минимально необходимый набор периферии (система тактирования, GPIO, MPU, WDT, отладочный UART, ...) и в отладочный UART начинается периодический вывод состояния ловушки (запомненного контекста) с индикацией режима ловушки через доступные средства индикации (лампочки и т.п.). Т.е. - реализую аналог "синего окна смерти" винды. Делаю примерно то же самое. В устройствах, где имеется FRAM, у меня также события критических ошибок (с контекстом) сохраняются в журнал критических ошибок (расположенный во FRAM). Но после предварительного сброса/рестарта CPU. В терминале вывод состояния ловушки выглядит так: По логу виден номер trap (3) + набор аргументов данного номера (в квадратных скобках) + регистры + вершина стека. PS: А почему вопрос в разделе "Операционные системы\FreeRTOS"? Обработка критических ошибок не имеет никакого отношения к ОС.
-
Если задачи - независимы друг от друга, то критическая секция нужна. Потому как пишущая задача вполне может захотеть обновить данные до того, как предыдущие данные считаны читающей задачей. Так что = критическая секция (для сериализации доступа к данным) + какой-либо механизм нотификации (об обновлении данных) читающей задаче. Второе может быть как простым volatile-флажком, так и каким-то средством из арсенала ОС. А если предыдущие данные ещё не считаны, но пришли новые? Куда их девать? Вот для того и нужны критическая секция + нотификатор. Из контекста вопроса видно, что передаваемые данные - какие-то параметры, которые могут приходить в любое время, асинхронно работе системы. В том числе и прийти несколько раз подряд с коротким интервалом. Неправильный алгоритм. Сперва читающий процесс должен сбросить флажок-нотификатор, и только потом - считывать данные. Так как иначе он может сбросить флаг новых данных, даже не прочитав их. Это не так. Флажков в РТОС бывает много разных. И в любом случае всегда советовать весьма тяжёлый мьютекс - так себе совет. Мьютекс я бы советовал в самом последнем случае. PS: Если не нравится критическая секция или мьютекс (который весьма сложен внутри, намного сложнее критической секции, а потому требует много ресурсов от ОС; и применять его лишний раз в простых случаях - неоптимально), то есть множество других вариантов межзадачной синхронизации. Вместо критической секции (которая может запрещать все прерывания), можно останавливать шедулер ОС на время чтения/записи разделяемых данных (что является аналогом критической секции, но без помех работе прерываний). Кроме того - есть механизмы межзадачной синхронизации вне-РТОС функционала. Спин-блокировка например. Если у ТС процессор = Cortex-M, то для атомизации доступа к разделяемым данным можно использовать механизм эксклюзивного доступа. В случае, если объём передаваемых параметров небольшой (~десятки байт), то эксклюзивный доступ намного легче (по занимаемым ресурсам) чем мьютекс. И при этом совершенно не мешает работе прерываний. При выборе конкретного способа синхронизации в каждом конкретном случае, следует идти от простого к сложному: Сперва примерить самый простой способ. Если не подходит - переходим к более сложному, примеряем его. И так далее... Только так можно создавать оптимальные программы.