AndruB
Свой-
Постов
64 -
Зарегистрирован
-
Посещение
Весь контент AndruB
-
Насколько я помню - это указатель что эти пины являются источником сигнала для дифпары.
-
88F6281-A0 и 88F6281-A1 - есть ли разница ? В DataSheetе написано, что это Custom Code, но что это означает и на что влияет я не нашёл. У дистрибьютеров есть и та и другая версия. Подскажите, есть ли разница?
-
Пользуюсь Quartus 8.1 и Modelsim к нему штатный. Все работает и RTL и Gate Level. Скачивал с сайта Alterы.
-
проект с XCZU3CG
AndruB ответил dim371 тема в Предлагаю работу
Третий месяц уже ждем. :( :bb-offtopic: (уж простите не удержался) -
Конечно интересно.
-
1. После любого изменения в FPGA надо а. экспортировать bitstream б. зайти в SDK и перегенерировать все bsp "Re-generate BSP Sources" (выделяете папку проекта bsp, правая кнопка мыши) если последний пункт не сделать, то начинаются дикие глюки работы программы. 2. Эти варианты и реализованы в SDK. 1) Согласен, что работа со штатной загрузкой SDK не радует, но tcl-скрипты удобны. Я взял за основу bat файлы загрузки из примера zc706_bist\ready_for_download, переделал их под проект и пользуюсь только ими. 2) При запуске debug это и происходит.
-
У Миландра это описано так : В каждом CAN контроллере имеется два счетчика. Этими счетчиками являются счетчик ошибок приема и счетчик ошибок передачи . Изменение состояния этих счетчиков происходит при приеме или передаче кадра ошибки. Когда любой счетчик достигает значения 128, контроллер CAN переходит в режим «error passive». В этом режиме он продолжает отзываться на кадры ошибки, однако при генерации кадра ошибки он вместо доминантных битов выставляет на шину рецессивные. Если счетчик ошибок передачи достигает значения 255, то контроллер CAN переходит в режим «bus-off» и больше не принимает участия в обмене по шине. Для возобновления обмена необходимо вмешательство процессора, который повторно инициализирует контроллер и подключает его обратно к шине.
-
Вернулись к проекту. Датчик ответил AСKом !!! Проблема была в неправильно установленной частоте обмена (заплутали в коэффициентах). Сейчас осваиваем SDO что бы установить нужный нам темп обмена и тип данных передаваемых в PDO . Спасибо за советы и поддержку.
-
Спасибо за ответы. К сожалению меня перекинули на другую работу и к датчику я вернусь несколько позже, выполню Ваши рекомендации и отпишусь.
-
Пытаемся подключить CanOpen датчик давления CMP8270 фирмы Trafag к микроконтроллеру 1986ВЕ1Т. К сожалению - это первый: 1. наш опыт общения с контроллером CAN. 2. наш опыт общения с протоколом CanOpen. 3. наш первое и единственное устройство. Пока результаты скромные, если не сказать нулевые. Мы научились отправлять заданную посылку с заданной частотой. (20 кв/с) Пытаемся обратиться к датчику по протоколу службы LSS - COB-ID 0x7E5 данные - 0x04 0x01 0x0 0x0 0x0 0x0 0x0 0x0 На осциллографе видим что посылка с заданными значениями идет. датчик молчит как партизан. Дополнительная беда, что датчик сперва установили в систему (надо было хоть как то сдать) и только потом отдали нам на отработку. Так что есть и небольшие сомнения в его исправности. В связи с вышеизложенным следующие вопросы. 1. При подаче питания на датчик в диапазоне от 8 до 19В потребление от 10 до 20 мА. Выходы CAN_L CAN_H устанавливаются на уровне 1В при 8В питания и при добавлении до 19В плавно поднимаются до 2В. - Нормальное ли это поведение. 2. Должно ли устройство CanOpen выдавать AСK подтверждение при обнаружении посылки. 3. Насколько важно согласование шины при полуметровой длинне и скорости 20 кв/с. 4. Насколько точно должна соблюдаться скорость 20 кв/с. У меня получается ошибка в 10%.
-
IAR и ZYNQ7000
AndruB опубликовал тема в Системы на ПЛИС - System on a Programmable Chip (SoPC)
Вчера натолкнулся в IARе на поддержку кристаллов ZYNQ7000. Но предлагаемый Example как то уж больно куцый. А пробовал ли кто подобную "связку" и есть ли в ней смысл? Zynq7020.rar -
Ищем команду разработчиков на проект
AndruB ответил svet2010 тема в Предлагаю работу
Если я правильно понял - ищется команда для написания ПО под новый процессор 1892ВМ14Я котрый способен переварить подобную задачу. -
Спасибо за подсказку. :rolleyes: Наверно попробуем Cortex M4.
-
Доброго времени суток! Требуется выбрать микроконтроллер, который должен решать следующие задачи : 1. По первому порту USB 2.0 high speed (480МГц) получать данные до 40 мегабит/сек (будет этот порт host или device пока не определено) Полученные и перепакованные данные сбросить по параллельной шине на ПЛИС для дальнейшей обработки. 2. По второму порту USB 2.0 full speed (12МГц) host получать и передавать данные до 2 мегабит/сек. Полученные и перепакованные данные сбросить по параллельной шине на ПЛИС для дальнейшей обработки. 3. Желательно наличие и третьего порта, аналогичного пункту 2. 4. Управлять по парллельной шине (напямую, или через ПЛИС) м\сх контроллера (манчестер). 5. Задание циклограммы работы всех вышеупомянутых устройств. Температурный диапазон - -40 +65. Желательна уверенность , что м\сх работопособна и при -60. Желательно наличие Stated Kits c обильными примерами по работе с USB. Зарание благодарю за советы.
-
Тесты по VHDL
AndruB ответил sv_brothers тема в Языки проектирования на ПЛИС (FPGA)
Мне показалась интересной книга Дж. Ф. Уэкерли "Проектирование цифровых устройств". Там дается описание работы типовых элементов схемотехники и их VHDL код. Кстати оттуда можно и вопросов понадергать. Впроче возможно я открыл Америку :rolleyes: -
Жаль, что не подхожу Вам по возрасту.
-
Разработка прошивок для FPGA Cyclone 2
AndruB ответил jojo тема в Предлагаю работу
Какие сроки и на каком языке? -
У Питерского Импульса есть трансформаторы на 10 Мбит с приемкой и идут работы на 10/100 Мбит.
-
проектирование МПП и монтаж BGA
AndruB ответил sifadin тема в Пайка и монтаж
Наши умельцы выдавливают пасту под одну из сторон, а затем повернув под углом плату и подгревая феном загоняют воздухом пасту под корпус, до тех пор пока паста не протечет с другой стороны. После чего устанавливают на BGA корпус гирьку весом 3-5г. повторно прогревают. Иногда помогает. -
Купили демо плату. Попытались запустить манчестер в режиме оконечника при работе генератора на 25 мГц. Правду пишут в руководстве - "стабильная работа не гарантируется". Даже при приеме 1 слова примерно каждая третья передача заканчивается сообщением "нет ответного слова" или "нарушение формата обмена". Миландровцы обещают добавить отдельный вход для генератора под Ethernet иэтим решить проблему. http://forum.milandr.ru/viewtopic.php?f=34&t=496 Принцип режима работы "Stand Alone 3" - насколько я понял из описания это режим прямого управления модулями интерфейсов извне при остановленном процессоре кристала. При использовании среды программирования в настройках указывается типовой кристалл Cortex M1 и только для настроек областей Flash памяти и загрузки используется дополнительный файл от Миландра. Так что для компиляции основной программы подойдет и gcc, а вот как быть с загрузкой и начальной областью памяти? Вообще с отладкой, какие то непонятные и необьясняемые Миландром трудности. Например в среде программирования Keil4 нельзя ипользовать для этого кристала родной программатор ULINK-2. А в среде программирования Keil3 можно.
-
Минимальный уровень 1 для 2,5В - 1,7В. Поэтому можно выходной пин банка 1,8В подтянуть через резистор к 1,8В и управлять им входом м\сх с питанием 2,5В. При этом есть вероятность нарваться на помехи при быстрых переключениях и значительной длины линии. Поэтому лучше сознательно так не делать. Только если "Так вот получилось" :)
-
1 - нетактируемая логика не требует генератора. 2 - EP3C80F484C8N - это BGA поэтому может быть элементарный непропай. 3 - проверьте, а на ту ли ногу Вы назначили сигнал? 4 - попробуйте на других. 5 - 3.3в не может быть на неподтянутой и неназначенной ноге, если Вы не указывали это требование в параметрах проекта.
-
Насколько я слышал, это ограничение можно обойти прописав в констрейнах что все используемые сигналы статические или низкоскоростные. Но сам это не проделывал. Может кто подскажет точнее.
-
Я бы отлаживал примерно в такой последовательности - 1. Отладочный пин на признак опустошения FIFO. 2. Отладочный пин на признак получения пакета по. 3. Осцилограф на отладочные пины. Настраиваем осцилограф на событие - признак опустошения FIFO. Смотрим как в это время принимаются пакеты. Соответственно два возможных варианта - 1. Перебоев с принятием пакетов нет - ковыряем проект ПЛИС (отбраковка битых пакетов ?; косяки при перезаписи из, в FIFO; ...) . 2. Видны перебои с поступлением UDP пакетов ковыряем ПО (анализаторы трафика, временные задержки программы, ...).
-
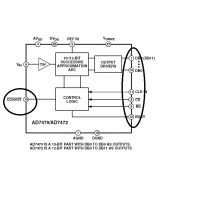
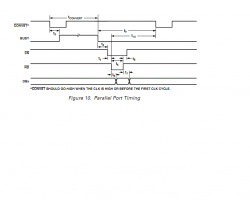
1) Подсоединить все отмеченные ноги АЦП к ногам ПЛИС 2) Написать проект формирующий следующую диаграмму.