=AK=
Свой-
Постов
3 234 -
Зарегистрирован
-
Посещение
-
Победитель дней
5
Весь контент =AK=
-
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Помехи можно разделить по способу, которым она наводится на сигнальную цепь: - наведенные через емкостную связь - наведенные за счет взаимной индуктивности проводов и от сильных внешних магнитных полей - электромагнитные, пойманные паразитными антеннами Чаще всего помехи приходят через емкостную связь. Если нарисовать эквивалентную схему, то имеем: (1) источник помехи - генератор ЭДС; (2) внутреннее сопротивление источника; (3) емкость связи; (4) входное сопротивление чувствительной цепи; (5) чувствительный элемент. Используя триггер Шмитта вы немножко меняете характеристики последнего элемента, (5). Вот у схемы на оптроне верхний порог срабатывания, скажем, 8.5В, а нижний 8.0В. Вы поставите вместо него триггер Шмитта, который имеет верхний порог срабатывания 8В, а нижний 4В. Что вы этим выиграете? Абсолютно н-и-ч-е-г-о! Потому что емкостная помеха наводится по-разному в состоянии 0 и в состоянии 1. В состоянии 0, когда линия висит в воздухе, основным способом борьбы с помехой является низкое входное сопротивление и высокий порог срабатывания, верхний порог. А в состоянии 1, когда ключ источника сигнала замкнут, его низкое вунутреннее сопротивление эффективно гасит помеху. Поэтому не играет никакой роли, какой нижний порог срабатывания, 4В или 8В. Еще раз, сравним просто компаратор с порогом 8В и триггер Шмитта с порогами 8В и 4В. - Ключ разомкнут, входное, скажем, 2кОм, верхний порог 8В, мощность срабатывания 32мВт в обоих случаях. - Ключ замкнут, его внутреннее, скажем, 10 Ом. Для компаратора помеха должна развить 12-8=4В, это 1.6 Вт. Для ТШ должна развить 12-4=8В, это 6.4 Вт. Однако помехоустойчивость будет определяться слабым порогом в 32 мВт, который одинаков, что для ТШ, что для компаратора. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Триггеры Шмитта нужны там, где есть медленно меняющиеся сигналы, которые надо преобразовать в цифровые. А от наведенных помех они в общем-то не спасают, разве что только от совсем слабых, которые меньше, чем гистерезис. Даже на приведенной картинке это видно: триггер Шмитта сработал от помех дважды. Это немножко лучше, чем просто компаратор, который бы сработал раз пять, но все же совершенно неприемлемо. Ложных срабатываний вообще не должно быть. Оценивайте помехоустойчивость по величине мощности, которую должна развить помеха, чтобы вызвать ложное срабатывание. Триггер Шмитта никак на эту оценку не влияет. Ваш 555 таймер не менее чувствителен к помехам, чем оптопара. В его составе есть чувствительные компараторы и триггер, это полное раздолье для помех. В промышленной автоматике никто не использует 555 таймеры в качестве "устройства для повышения помехоустойчивости", поскольку толка от него нет никакого. Все вменяемые разработчики делают дискретные взоды на оптронах. С небольшими вариациями. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Совершенно непонятно почему вы решили, что это "самый помехозащищенный вариант". Никаких оснований для такого мнения не видно. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Мы не "пускаем крошечный ток", а расчитываем схемy так, чтобы она сработала при заданном пороге и не сгорала при перегрузках. Можете пускать и больший ток. Работать лучше не будет, oднако при перегрузке по входу светодиод сгорит с большей вероятностью. Я привел общий ход рассуждений, а цифры - только для иллюстрации. В качестве CTR надо брать не "типичное значение", а минимально и максимально возможные, с учетом разброса от экземпляра к экземплярy, тока светодиода, температуры и старения. И пороги срабатывания у триггера Шмитта не в середине, а примерно на уровне 1/3 и 2/3 от питания. При полном расчете надо получить диапазоны значений нижнего и верхнего порогов срабатывания и убедиться, что они не выходят за заданные пределы. Даже мелкая помеха на светодиоде может дать вспышку света, которую "поймает" фототранзистор. Резистор параллельно светодиодy не даст помехам и утечкам зенера создать ложный сигнал на выходе. Учтите, что у дешевых оптронов CTR имеет сильный разброс и может оказаться таким большим, что даже мизерные токи светодиода дадут ложное срабатывание. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
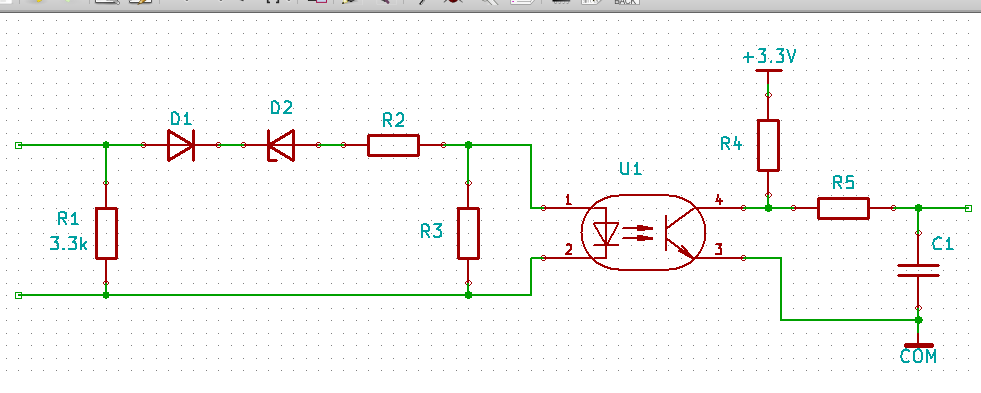
1) Выбираете R4, скажем, 10к. 2) R5 берете раз в 3..10 больше чем R4, скажем, 47к. Ставите C1 такой, чтобы получить нужную частоту среза или нужную постоянную времени. 3) Зная CTR оптрона определяете минимально необходимый ток светодиода. При R4=10к, CTR=100% и пороге срабатывания порта микроконтроллера в середине диапазона, срабатывание произойдет при токе светодиода примерно 0.165 мА 4) Выбираете ток через R3, скажем, 0.15 мА. Напряжение на светодиоде порядка 1.5В, значит, R3=10к. 5) Выбираете R4, чтобы при максимально возможном входном напряжении (скажем, 30В) ток через оптрон оставался в разумных границах, скажем, не более 10 мА. Например, R4=3.3к. 6) Определяете порог срабатывания на левом конце R2. При срабатывании через R2 течет ток 0.15+0.165мА, на нем падает примерно 1В. Еще 1.5В падает на светодиоде. Значит, порог будет около 2.5В 7) Выбираете стабилитрон, чтобы суммарный порог по входу оказался примерно 8...9В. Ставите зенер 5.6В, получаете 5.6+2.5 = 8.1В. Плюс еще на диоде упадет примерно 0.6В. При таком пороге и при R1=3.3к помеха должна развить мощность не менее 23 мВт, чтобы вызвать ложное срабатывание. Это не такой уж плохой результат. Хотите большей помехоустойчивости - ставьте R1 меньшего номинала. При 2.2к можность помехи должна возрасти до 34 мВт, но при этом в рабочем режиме сам резистор будет рассеивать 65 мВт. Если не жалко переводить электричество в тепло, можно и еще более низкоомный резистор поставить. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Вообще-то у нее нет "питания". Это просто гальванически развязанный дискретный ввод. Просто включаете ее вместо своей: верхний входной конец к +12, нижний - к открытому коллекторному выходу датчика. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Нет. Вы забыли самое главное - пункт 1), помехогасящий резистор. Кроме того, очень рекомендую шунтировать светодиод оптрона конденсатором или резистором, иначе он сам "ловит помеху".
-
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Типовая схема состоит из нескольких узлов, выполняющих определенные функции: 1) Входное сопротивление схемы обычно делают достаточно низким, для чего можно поставить на вход резистор. Типовая схема часто используется для ввода сигналов от обычных выключателей (концевики и т.п) или от схем с ОК выходом. Когда выключатель находится в выключенном состоянии, то вход "висит в воздухе", но при этом к нему подключен длинный провод, которым он соединен с выключателем. Этот провод "ловит" всевозможные наводки. Оптроны нынче чувствительные и прекрасно эти наводки транслируют дальше. Чтобы уменьшить наводки, нужно иметь как можно более низкое входное сопротивление. Например, для сигналов 24В стараются иметь входное порядка 2..3 кОм. Меньше этого делают редко, т.к. греется сильнее. 2) Затем ставят какой-либо пороговый элемент, чтобы "отрезать" все сигналы (т.е. наведенные помехи) ниже какого-то уровня. Часто для этого используют стабилитрон. Величину порога обычно выбирают близкой к середине рабочего диапазона. Пороги оговорены в разных стандартах, стандарт ГСП требует, чтобы порог составлял не менее 20% и не более 80% от номиналного напряжения. Универсальный вход на 12В и на 24В получается, если порог срабатывания сделать примерно 9В. 3) Предусматривают какую-то защиту от перемены полярности. Или диод ставят, или мостик. 4) Для развязки обычно ставят оптрон. Большой ток через оптрон гнать не имеет смысла, поскольку входной резистор по п.1) уже сделал все что требуется. 5) После оптрона обычно ставят RC-фильтр низких частот, чтобы задавить остатки ВЧ помех, пролезшие через оптрон. Затем ставят триггер Шмитта. -
Как оптимально подключить датчик
=AK= ответил AlexPlasma тема в В помощь начинающему
Можете считать, что в режим пробоя стабилитрон переходит мгновенно. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
А нужен ли? Ведь изохронная труба никаких особых чудес по сравнению с балком вам не явит. Вся разница будет проявляться, когда один USB хост при посредстве хаба (или хабов) расшарен между многими устройствами. Тогда USB планировщик хоста посмотрит выданные запросы и скажет "ОК, я берусь обеспечить изохронную трубу с запрошенной пропускной способностью, ради этого я все балки буду обеспечивать по остаточному принципу". Однако если вы поставите свою собственную USB карту, к которой ничего, кроме своего устройства, подключать не будете, то все, на что способен этот хост, вся пропускная способность интерфейса все равно будет ваша: хоть в виде балка будете ее использовать, хоть в виде изохронного. А балк при этом еще автоматически обеспечит гарантированную доставку. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Для перестраховки там тоже можете поставить шинники RS-422. Самым слабым звеном будет USB. Вместо него лучше всего было бы использовать Эзернет. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Будьте конкретны, поскольку я в упор не вижу, чтобы моя реакция была бы неадекватной. Приведите, что вам не понравилось, и я тоже конкретно укажу, на что я отвечал. Замечу, что, в отличие от, я не грешу чистым незамутненным флудом, мои сообщения как правило несут содержательный технический смысл. Вот это - первое, которое не соответствует этому правилу. Вы с такой точки зрения никогда не пытались рассматривать сообщения на форуме? -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Я уже писал, что RS-422 требует, чтобы выходное сопротивление передатчика не превышало 100 Ом. Вы неспособны дотумкать, что из этого следует, что передатчик RS-422 нельзя выключать. А для экономии энергии умные люди не передатчиком дрыгают, а ставят RC-терминаторы. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Это все выковырянные из носа никчемные "страшилки". Наверное, для вас это реализовать составляет трудности, но для любого мало-мальски вменяемого разработчика никаких проблем нет. Можно взять за основу Модбас, в котором все есть, или можно использовать байт-стаффинг, что гораздо проще, поскольку не требует сравнительно строгого тайминга. Среди байт-стаффингов советую ТС обратить внимание на элегантный и эффективный COBS. Организация "мастер-слэйв" в парном соединении является абсолютно естественной и не требующей никаких усилий для реализации. Так что ТС вполне волен выбрать полудуплекс, если ему так хочется, хотя с полным дуплексом (т.е. RS-422) на кабеле Cat5 или Cat6 реализация будет немножко проще. Главное, чтобы при этом ТС не слушал идиотских советов "выключать передатчик для экономии энергии", иначе ставить дуплекс становится бессмысленным. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
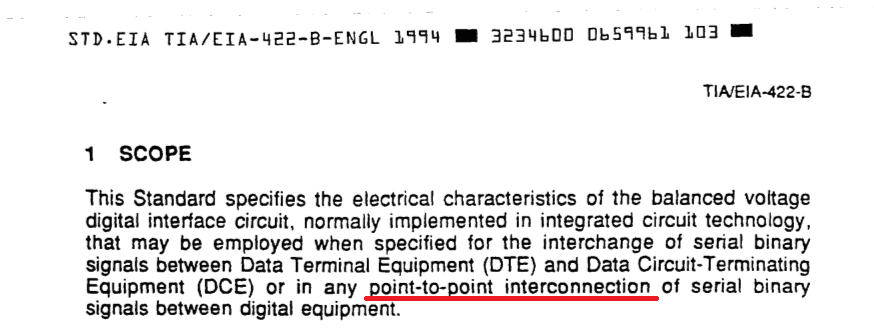
Что мне на них смотреть, я их предтеч DS26LS31/32 уже в далеком 1985г использовал. Для шины, которая изначально создавалась под RS-485. Поскольку к моменту выхода моего изделия советская промышленность уже должна была наладить выпуск их аналога, а вот нужного мне аналога SN75176 в тот же срок еще не было. Я уже говорил раньше, и еще раз повторю: производитель в полном праве выпускать передатчик с третьим состоянием и писать, что он "соответствует RS-422". Потому что, если его вход EN намертво посадить на питание, а вход ~EN - на землю, то получится самый натуральный передатчик RS-422, без малейшего изьяна. А вот если во время работы постоянно дергать эти входы, то включая, то выключая выход передатчика, то это будет уже не RS-422, а ублюдочный вариант RS-485. PS: Судя по всему, RS-422 изначально сильно затачивался на резервированные системы. Отсюда и много приемников на линии, и требование перехода драйвера в высокоимпедансное состояние при отключении питания, и практические реализации драйверов с переводом в третье состояние по внешнему сигналу. Ну а поскольку даже четверированная система при этом останется организованной как "точка-точка", то и никаких упоминаний о "точка-многоточка" в стандарте нет. А для совсем тупых, которые отключают передатчики ради "экономии тока в линию", в стандарте расписано, как расчитать RC-терминаторы. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Инженерный жаргон. Я вот тоже, конденсаторы предпочитаю "кондерами" называть, для краткости. Однако плохо то, что для прямым следствием упрощений и жаргона является огромное распространение тупых самопальных протоколов с поганой помехоустойчивостью поверх RS-485, создатели которых, очевидно, не понимают принципиальную разницу между настоящим, не жаргонным RS-422, и RS-485. Пример такого непонимания, сопровождаемый растопыренными пальцами и откровенным пустобрехством, был нам наглядно продемонстрирован только что на этой ветке. Я на таких в реальной жизни тоже насмотрелся. Как говорил Окуджава по этому поводу, "мне давно пора уже орден получить" :) -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
В рамках стандарта RS-422 - таки да. Я вполне понимаю создателей стандарта, которые не стали париться с жеванием соплей типа что "иногда также и точка-многоточка". Поскольку в рамках стандарта ничего принципиально нового это не дает, а лишние сущности надо отрезать бритвой. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Вы, извиняюсь, в стандарт-то заглядывали? Зачем такие удивительные придумки вслух говорить? Еще один "знаток" выискался... Приемников может быть до десяти штук. А соединение остается быть "точка-точка".
-
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
RS-422 прямым текстом оговаривает соединение "точка-точка", на рисунках приводит двунаправленное дуплексное подключение, а для передатчика определяет только уровни 0 и 1 и требует низкое выходное сопротивление, не более 100 Ом. И никакой "отключенной линии" там нет. Так что ваши поделки, напоминающие RS-422, но переводящие передатчик в высокоимпедансное состояние, стандарту RS-422 не соответствуют. RS-485, тоже прямым текстом, оговаривает топологию "шинa", к которой подключается до 32 приемо-передатчиков. Передатчик RS-485 обязан уметь переходить в выскоимпедансное состояние, чтобы соответствовать требованиям стандарта. Вы бы хоть почитали что-нибудь по этой теме, чтобы немножко подковаться и не нести невежественную ахинею типа "стандарт RS422 номирует ТОЛЬКО уровни сигналов и ничего более", или что RS-422 "НИКАК не требует НЕОТКЛЮЧЕНИЯ передатчика", и т.п. У http://www.ti.com/, помнится, неплохие были аппноты для начинающих, вам это как раз подойдет. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Нет. За счет механизма, гарантированно обеспечивающего очистку входного буфера приемника в начале каждого кадра передатчика. Когда начинает работать передатчик, весь мусор, наведенный помехами, будет вычищен. Поэтому сам пакет от передатчика будет принят приемником правильно. Конструкция этого механизма не единственно возможная, однако принцип очистки приемника должен соблюдаться. Ваши высказывания про якобы "далеко не всегда включенные передатчики RS-422" являются чистым бредом. Нет там таких уровней сигнала, есть или 0 или 1. И если производители делают микросхемы, совместимые с RS-422, но имеющие вдобавок еще третье состояние передатчика, то сам стандарт RS-422 от этого ни на йоту не изменяется. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Учите матчасть. В RS-422 не существут высокоимпедансного состояния передатчиков, они всегда включены. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Значит, есть промежуток времени, когда один мк уже закончил передачу и уже выключил свой передатчик, а второй еще не включил свой передатчик. Если в этот промежуток времени влезет помеха и создаст, например, ложный старт для UART-а, то при фиговом протоколе один только этот ложный старт испортит весь пакет. Если помех много, значит, надо считать, что помеха обязательно влезет в этот промежуток. Modbus RTU - это не панацея, а всего лишь пример помехоустойчивого протокола. Если подумать головой, то можно и самопальный придумать ничуть не хуже. Только думать надо именно головой. А для этого желательно сначала изучить Modbus RTU (благо он открытый) и понять, почему он устойчив к помехам. Когда это осознаете, можете изобретать свой самопал. А без изучения, наобум, "на авось" - придумаете очередной отстой. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Это называется RS-422, у него передатчики вообще не переводятся в третье состояние, они всегда включены. Для него можно любой протокол использовать, он изначально помехоустойчивый. Но это обмен точка-точка, с раздельными витыми парами, одна - на прием, другая - на передачу, дуплекс. А вы вроде как RS-485, то есть шину, многоточку, полудуплекс, собирались использовать? В полудуплексе вам поневоле придется выключать передатчик, иначе будете слышать только себя. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Не диво, этого не понимают большинство создателей самопала для RS-485. На шине RS-485 есть два состояния: 1) когда все передатчики выключены (бОльшую часть времени шина находится именно в этом состоянии) 2) когда один из передатчиков включен. В первом состоянии, для того, чтобы создать ложный сигнал, помеха должна пересилить резисторы подтяжки. Во втором состоянии помеха должна пересилить сигнал работающего передатчика RS-485, а он в сотню-другую раз мощнее, чем резисторы подтяжки. Создатели самопальных протоколов чаще всего не различают эти два состояния. Поэтому их протоколы как правило таковы, что помехи, наведенные в первом состоянии, вызывают порчу и отбрасывание пакета. В условиях сильных помех это приводит к тому, что отбрасывается практически каждый пакет. У cоздателей Modbus RTU было достаточно мозгов, чтобы создать протокол, на который вообще никак не действуют помехи в первом состоянии. В нем, чтобы испортить пакет данных, помеха должна пересилить включенный передатчик. Помехоустойчивость RS-485 c Modbus RTU сравнима с помехоустойчивостью RS-422 и даже превышает ее, поскольку передатчики RS-485 мощнее. -
Помехозащищенный RS-485
=AK= ответил Dima1060 тема в В помощь начинающему
Я вам об этом и толкую. Вшивые самопальные протоколы RS-485 не обеспечивают доставку данных в условиях сильных помех, у них вообще все пакеты будут "битыми" и окажутся отброшенными. А Modbus RTU в таких условиях будет работать как ни в чем ни бывало.