Gorby
Свой-
Постов
707 -
Зарегистрирован
-
Посещение
-
Победитель дней
4
Весь контент Gorby
-
Хочу добавить про 10 000 часов. В той версии истории, что читал я, были несколько иные акценты. И вот эти акценты очень важны. А их переврали. Сравните: - было обнаружено, что так называемые "таланты" (причем неважно в какой области), посвятили своей профессии в среднем около 10000 часов. - это факты, обнаруженные при исследованиях - занимайся чем-либо 10000 часов и ты будешь талант. - а это дедуктивное следствие, в общем случае неверное (недоказуемое). Проковыряйте в носу 10000 часов и что? Ну так вот, при исследованиях "талантов" и их менее одаренных коллег выяснилось, что коллеги не тупее, а таланты не умнее. Просто таланты потратили на обучение НАМНОГО больше времени. И как раз это время в среднем и составило 10000 часов. И почти не зависит от профессии. Как тут уже говорили, кто-то в армии выучил "три аккорда". А кто-то с шести лет в музыкальную школу ходил. Вот эта разница и называется "опыт". Я вас умоляю, какие 20 часов....
-
FIFO (CPLD+SRAM)
Gorby ответил uragan90 тема в Работаем с ПЛИС, области применения, выбор
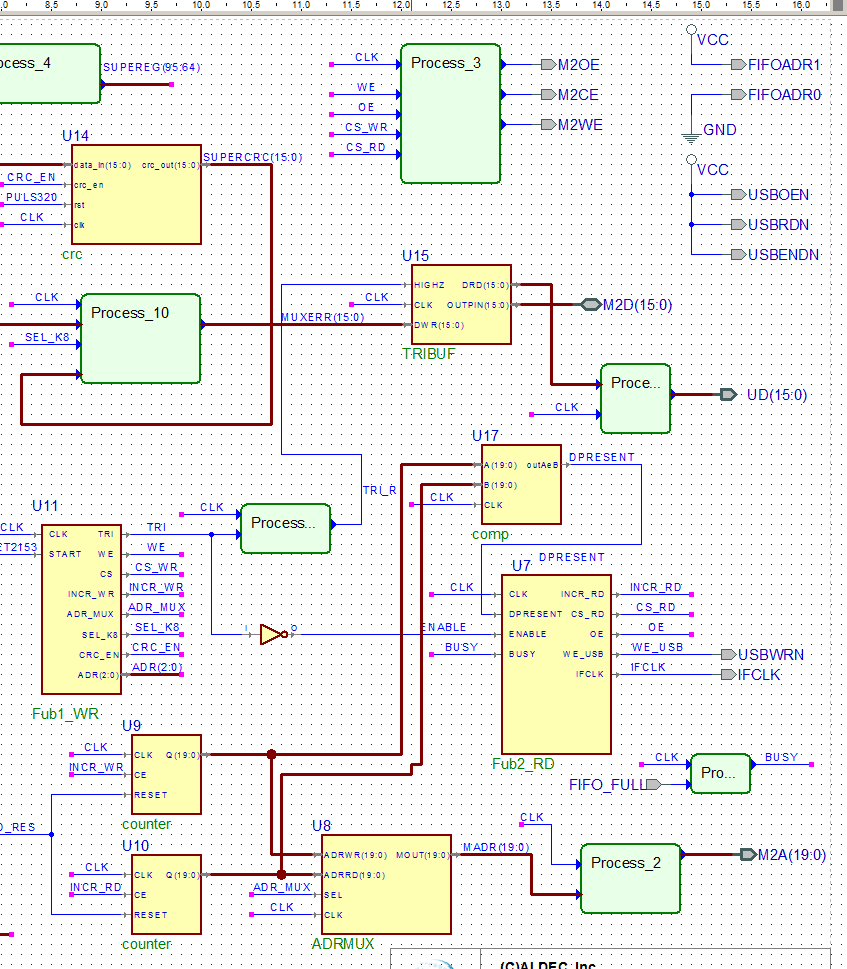
Да и не надо. Не о том речь. Используйте Актив-ХДЛ! Нарисуйте пути данных, а управление уже очевидным будет. обратите внимание на часть "схемы" справа. С буквой М - сигналы на память. Внутренняя шина MUXERR - вход ФИФО. Шина UD - выход ФИФО. M2D - двунаправленная шина данных микросхемы памяти (16 бит). M2A - адреса памяти. U11 и U7 -вот собственно две простые машинки, рулящие управлением. FIFO_FULL - внешний вход, собственно ЗАПРОС данных (имелся в виду фифо юсб контроллера). Если фулл, то данные НЕ слать. Данные из ФИФО наружу (UD) стробируются USBWRN (низкий уровень) по клоку IFCLK - формируется из основного клока. А какие там проблемы с моделированием шин? Есть там конечно нюансы, но не страшные.
-
FIFO (CPLD+SRAM)
Gorby ответил uragan90 тема в Работаем с ПЛИС, области применения, выбор
Да, конечный автомат нужен. Но он простой, один-два триггера. Вы с частотами-то поосторожнее. Тщательно просчитайте, возможно ли в принипе добиться от Вашей памяти такой растактовки. Тут нужен в клеточку лист бумаги, карандаш и мозг. Оно само всё покажет. Если основной клок 100МГц и данные поступают на каждом втором такте - то у Вас просто нет шансов даже на запись - каким образом сформировать управляющие сигналы? Или делать асинхронщину на RC цепях. У Вас нету системного подхода. Сначала - растактовка памяти (управляющие сигналы формируются из виртуального клока, и это будет явно не 100МГц, а 180, 166 или рядом). Критерий - максимально выжать быстродействие ОЗУ при условии, что управление идет почти на макс скорости (половина системного клока). Вижу сам, что сумбурно. Вы сами сразу всё увидите, как растактовку ОЗУ нарисуете. -
FIFO (CPLD+SRAM)
Gorby ответил uragan90 тема в Работаем с ПЛИС, области применения, выбор
Значит, у Вас такой задачи не стояло Автору топика: вполне заурядная задача, смелее делайте и будет всё работать. Не забудьте про довольно большие счетчики адресов, их сравнение, и результат этого сравнения. Тут правильно советуют - операция записи в ОЗУ имеет приоритет перед чтением. Работу с ОЗУ разбиваем на циклы. Цикл состоит из записи и потом чтения. Если есть запрос на запись - пишем. Если есть запрос на чтение - читаем, пока не появится запрос на запись или не кончится чтение. Если одновременно присутствует и запрос на запись, и на чтение, то в каждом цикле одно слово должно записаться, и одно-вычитаться. Тут надо кропотливо поработать с таймингами ОЗУ. Очень помогает моделирование в Моделсиме или что там у Вас есть. -
Убедитесь, что в ERRATA не упоминается такой случай. Убедитесь, что в настройках компилятора выбран правильный процессор (при неверном выборе всё "как-бы" работает, но не так). Наблюдатель влияет на объект. Отладчик Вам здесь не поможет. Лучшая отладка - пин на выход и осциллограф. Урезайте код до минимально возможного, вычленяйте проблему. Проверьте, выполняется ли условие возникновения прерывания (ну например, счетчик тупо никогда не досчитывает до места , где должен вызвать прерывание). Понизьте уровень оптимизации или совсем ее отключите. Поскольку код урезан до минимального, смотрите его ассемблер глазами очень тщательно - например на предмет доступа к регистрам, куда не должен доступаться (управление прерываниями). Удачи.
-
ModelSim SE-64 10.1с
Gorby ответил Maverick_ тема в Среды разработки - обсуждаем САПРы
Ну да, vsim.wlf. Даблкликаем на нем мышкой и он открывается в среде Моделсим. И можно просматривать все сигналы. Чуть сложнее. Запустить Моделсим. File->Open <ваш VLF> Затем руками команду add wave -r /* -
ModelSim SE-64 10.1с
Gorby ответил Maverick_ тема в Среды разработки - обсуждаем САПРы
Вам ли не знать?! При симуляции образуется на диске длиннющий файл уж не помню с каким расширением. Так вот, если на нем после кликнуть мышкой, то он откроется в моделсиме со всеми волнами. Правда только смотреть, моделировать уже нельзя. -
Нужна помощь с ЮСБ 3.0 хабом
Gorby ответил Gorby тема в Интерфейсы
Спасибо! В точку! Ну почему не на 1-10 странице?... -
Нужна помощь с ЮСБ 3.0 хабом
Gorby опубликовал тема в Интерфейсы
Здравствуйте. Окружение: обычный современный лаптоп средней руки с одним ЮСБ 3.0 и двумя ЮСБ 2.0 портами под управлением Вин 8. Есть две промышленные видеокамеры uEye (разные - одна цветная, другая - ч\б). Есть специализированный софт для камер Cocpit, где можно играть с параметрами и наглядно видеть скорость потока данных и сбои. Обе камеры - ЮСБ 2.0 HS, построены на Cypress 68013. Наблюдения: Обе камеры включены в ЮСБ 2 порты на одной стороне лаптопа. Очевидно, используется один хост-контроллер и внутренний хаб. - при суммарном потоке данных с камер более 35 мБ/с начинают пропадать кадры. Это согласуется с пропускной способностью одного хоста и хаба за ним. - если одну из камер переключить на находящийся с другой стороны разъем ЮСБ 3.0, то удается достичь вдвое более высокий поток данных, до 60-70 Мб/с. Это подверждает версию о том, что на ЮСБ 3.0 стоит отдельный хост-контроллер. Сейчас самое странное: Теперь обе камеры включены в порты 4-портового ЮСБ 3.0 хаба, имеющего внешнее питание. Аплинк порт хаба подключен к ЮСБ 3.0 порту лаптопа. Всё определяется, работает, но как и прежде, при суммарном потоке данных с камер более 35 мБ/с начинают пропадать кадры. Это ни с чем не согласуется. Как будто нет никакого ЮСБ 3.0 транспорта. Как так может быть? Ожидалось, что при использовании ЮСБ 3.0 хаба оба порта с устройствами ЮСБ 2.0 будут работать с максимальной пропускной способностью ДВУХ портов (то есть ДВА по 35 мб/с). Крамольная мысль: неужели чтобы достичь бОльшей скорости, девайсы за хабом тоже должны быть 3.0 ? Можете как-то прокомментировать? Хаб - самый обычный ISIDU , даже без управления питанием. В дальнейшем предполагается разработка собственного хаба на TI TUSB8041. Заранее благодарен за ответы. -
Помогите разобраться с SSP LPC2366 в режиме SLAVE
Gorby ответил Yaumen тема в ARM, 32bit
Вот это действительно странно. Нет никакой необходимости стробировать с SSEL каждый байт. У вас верно сделано, SSEL на время передачи всех 4-х байт. Приемник обязан принимать. То, что первый байт принимается верно, подтверждает правильность выбранных режимов (там еще те грабли могут быть). А вот тут немного не так. На самом деле при SPI тактовой (сколько там у вас? 40 кГц?) принятие символа - очень редкое событие. Это не 2 и не 10 MHz. Попробуйте сделать одно прерывание на один байт. -
Помогите разобраться с SSP LPC2366 в режиме SLAVE
Gorby ответил Yaumen тема в ARM, 32bit
Разберитесь с условием while (SSP0MIS_RXMIS & SSP0MIS). Очевидно же, что следующий байт придет только через достаточно большой интервал времени (относительно скорости процессора). Получается, вы несколько раз считываете один и тот же байт. Убедитесь, что при чтении первого байта сбрасывается флаг готовности. А вообще как-то стремно: прерывание вызывается для каждого принятого байта отдельно, но внутри прерывания вы пытаетесь вычитать более одного. Разберите более подробно как работает m_SSP0.Read(). -
Зажим экрана для печатной платы
Gorby ответил cerebral тема в Электробезопасность и ЭМС
Натурально, прячем некрасивости под термоусадку. -
УАРТ через ЮСБ - это не совсем УАРТ. ЮСБ - принципиально блочный интерфейс, а УАРТ - символьный. Вам нужно изменить архитектуру программирующего софта. ПК через ЮСБ->УАРТ передает Вспомогательному процессору блок данных (0.5 или 1 кБ) и команду, что с ними делать. Он отрабатывает команду, записывая блок в микросхему-таргет. Аппаратные подробности SPI никуда наверх не идут (только для индикации ошибок). Точно также и с чтением. Даем команду на чтение блока. Ждем. Потом блок вычитываем. На ПК детали SPI не видны. А если хочется прямо с ПК рулить SPI ножками, то Avreal Вам в руки. Удачи.
-
RS-232 на скоростях 115200 и х2
Gorby ответил rf_pcb тема в RS232/LPT/USB/PCMCIA/FireWire
>>я должен увидеть скорость приема близкую к 7200 байт/с (115200/8/2). Неправда. 115200/10=11,52 килобайт\сек. Это в идеале. Десять битов на посланный байт. >>Пишу ПО в Билдере, использую стандартный API функции Прочтите мой ответ "по буквам". А затем "слитно". Как быстрее? А почему? Правильно выбирайте функции. Непременно получите. Удачи. -
Ага, если делать это языком. Вы в курсе, что сервовентили бывают со временем срабатывания от 18 до 180 секунд? И на разное напряжение, от 12VDC до 230VAC. А еще разных диаметров, разные системы присоединения. И так во всем. То, что не запроектировано с самого начала, потом доделывается с очень большим трудом.
-
Укажите кристалл - АВРы бывают сильно разные. Функцию общения с микросхемой драйвера шагового двигателя - TMC260 - по телефону или как? Или тоже по SPI? частота следования шагов плавно нарастает и убывает - "первый полк марширует..." - время как считается? Таймером или NOPами? А частота кварца где? А свободный таймер есть? А прерывания можно? А так да, по-вашему довольно понятно :)
-
Эта цифра - из эмпирического правила, что зазор до чужого проводника должен быть раза в три больше, чем ширина дорожки. На самом деле, гораздо бОльшую роль играет ширина самих трасс и толщина изоляционного материала до опорного слоя. Конкретно для USB нужно обеспечить 90 Ом дифференциальный импеданс. Пример: при трассах шириной 0.2мм , ширине зазора 0.22мм и толщине субстрата 0.1 мм импеданс примерно равен 87 Ом. Далеко не каждый производитель предложит вам недорого такую плату (минимум - 4-слойку). В Вашем случае, если длина трассы не превышает двух-трех сантиметров и нет особых требований по EMC, то париться вообще не следует - любые дорожки с любым зазором (в разумных пределах) будут работать.
-
Беспроводное питание датчика
Gorby ответил kumle тема в Силовая Преобразовательная Техника
Завместо передающей катушки поставьте четыре постоянных магнита ортогонально. Тогда на "змейке" получите переменный ток. Его можно выпрямить и сгладить. На вашу мощность должно потянуть. -
предлагаю оценить патент на фильтр
Gorby ответил TigerSHARC тема в ЭМС
Ну так там же все написано: отличается тиристорным ограничителем напряжения на катушках индуктивности. И еще последовательно с большими катушками включены мааааааленькие Ferrite Beads. -
Подойдет ли драйвер к двигателю?
Gorby ответил zheka тема в В помощь начинающему
Едва ли это правда. В драйверах ШД ШИМ как раз и используют для регулировки/ограничения тока. Ведь ключ работает на индуктивную нагрузку. И ток плавно нарастает. По достижении заданной величины тока ключ выключается до конца периода управления. Дальше процесс повторяется с некоторой частотой управления, которая в разы больше, чем скорость шагания. При это ставновится возможным питать двигатель от повышенного напряжения, что позволяет добиться более быстрого нарастания тока и как следствие, возможна работа на более высокой частоте шагов. -
Гениально! Совсем немного осталось до магнита на веревочке - и тогда точно уж никаких проблем со смачиваемостью\капиллярностью. А, и тоже видеокамеру...
-
Ну так нельзя. Если хотите показать питание процессора, то и станьте на его питание (на один из блокировочных конденсаторов). Уверяю Вас, согласно законам коммутации, Вы не увидите на конденсаторе тех пиков. Отверните от щупа земляной проводник с "крокодилом" и используйте пружинку из комплекта. А плата что, односторонняя? - Вижу неметаллизированные отверстия. У Вас вообще есть земляной полигон? Может не надо с мельницами сражаться? Чтобы потенциал земли заметно скакал, токи должны быть десятиамперные. Или сопротивление земли порядка десятков Ом. Обследуйте землю на предмет неразрывности и низкого сопротивления.
-
Уважаемый, того безобразия, что Вы показываете на шине +3.3В при таком построении блока питания не может быть в принципе. Еще можно как-то понять просадку. Но откуда выброс?! Это после двух стабилизаторов с конденсаторами между ними? Не верю!(с) Либо Вы не туда подключили землю осциллографа (довольно распространенная ошибка), либо у Вас нет земли как цепи с нулевым потенциалом (дорожку резанули или не провели) и теперь земля идет по бооольшому контуру в том числе и по кабелю осциллографа. Вот тогда такие глюки возможны.
-
Узнаю брата Колю!!! Да, именно эта схема. Конденсаторы паяются непосредственно на корпус двигателя. Дроссельки там на ферритиках - по-современному ferrite beads. То есть низкодобротные, с поглощением. Такие НЕ звенят. Ну не может земля прыгать. Не может моторчик 50-100мА давать такие эффекты. Выкладывайте полную схему - от розетки и до моторчика.
-
Вход для кнопок
Gorby ответил toweroff тема в В помощь начинающему
Радиолюбители... Как они трогательно наивны.... И всё... Ни тебе подумать о минимальном коммутируемом токе, ни тебе предусмотреть элементарную защиту от статики, от наносеков и микросеков. А то разлетится в пух и прах "контроллер на плюс три вольта" от первой молнии, шарахнувшей в десяти кварталах. А поди ж ты и землю от процессора выведем аж на устройство. Ну и параллельно кнопочкам - кондерчики. Зачем? - Ну, слышал, взрослые так делают...