serjj1333
-
Постов
527 -
Зарегистрирован
-
Посещение
Весь контент serjj1333
-
Точность БПФ float vs fixed point
serjj1333 ответил Озон тема в Алгоритмы ЦОС (DSP)
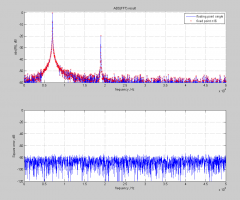
Вот модель, меняя параметр WIDTH можно сравнивать реализацию fixed point FFT и floating point single precision FFT. clear all; Ns = 4096; fs = 100e3; Ts = 1/fs; t = 0:Ts:(Ns-1)*Ts; SNR = 30; df = fs/Ns; f = 0:df:(Ns-1)*df; f0 = 7e3; f1 = 19e3; A0 = 1e0; A1 = 1e-1; x = real(A0*exp(1i*2*pi*f0*t) + A1*exp(1i*2*pi*f1*t)); y = awgn(x, SNR, 'measured'); WIDTH = 16; y_fi = sfi(y, WIDTH); w = fi_radix2twiddles(Ns); w_fi = sfi(w, WIDTH); %y = y.*w; Y_fp = abs(fft(single(y))); Y_fp = Y_fp/max(Y_fp); Y_fi = abs(fi_m_radix2fft_withscaling(y_fi, w_fi)); Y_fi_ver = double(Y_fi); Y_fi_ver = Y_fi_ver/max(Y_fi_ver); err = Y_fp - Y_fi_ver; err = err .* err; str = sprintf('fixed point n%d', WIDTH); figure(1); clf(); subplot(2, 1, 1); hold on; plot(f, 20*log10(double(Y_fp) + 1e-15), 'b'); plot(f, 20*log10(double(Y_fi_ver) + 1e-15), 'xr'); title('ABS(FFT) result'); xlabel('frequency, Hz'); ylabel('abs(fft), dB'); legend('floating point single', str); grid on; hold off; axis([0 fs/2 -60 1]); subplot(2, 1, 2); plot(f, 10*log10(err + 1e-15)); grid on; xlabel('frequency, Hz'); ylabel('Square error, dB'); axis([0 fs/2 -120 0]); Пример графика для вашего случая Для 15 бит, как видно из графика, ошибка fixed point реализации пренебрежима мала в сравнении с разрешающими способностями Фурье.