геннадий75
-
Постов
20 -
Зарегистрирован
-
Посещение
Весь контент геннадий75
-
Webasto USB/ k-line
геннадий75 ответил геннадий75 тема в АВТО электроника
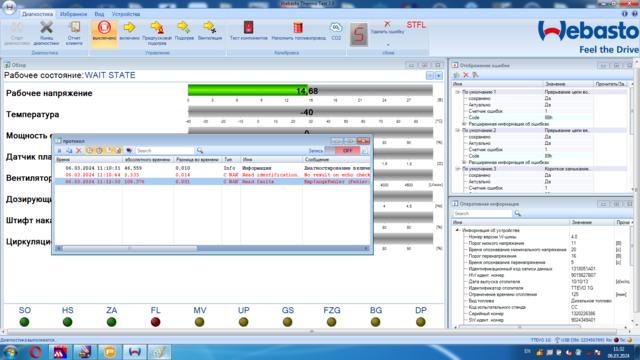
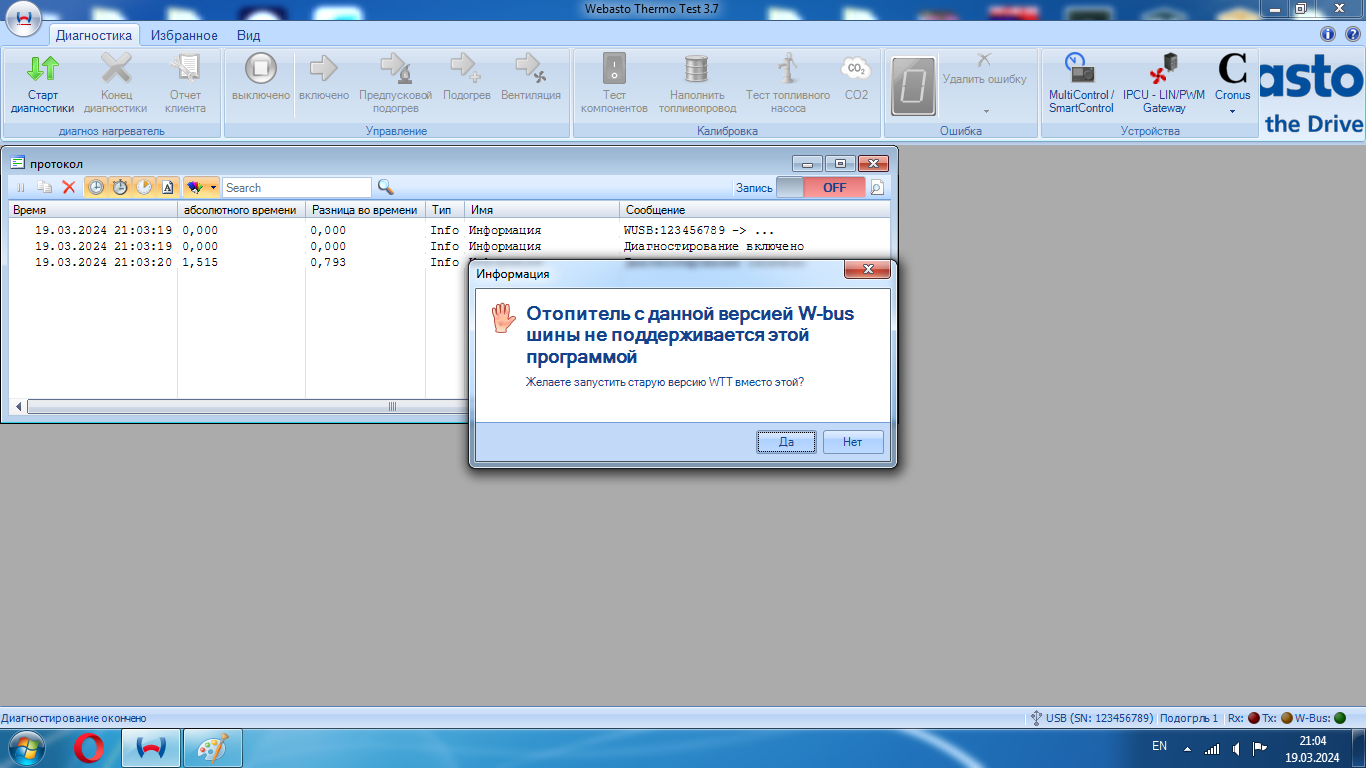
Если захочешь V3 диагностировать старые подогреватели , в лучшем случае увидишь такую заставку .
-
Webasto USB/ k-line
геннадий75 опубликовал тема в АВТО электроника
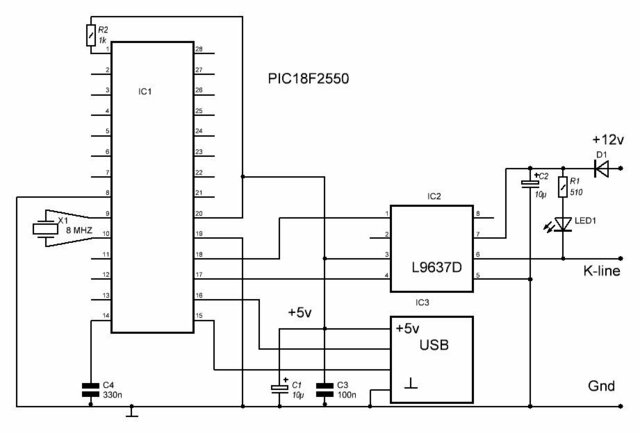
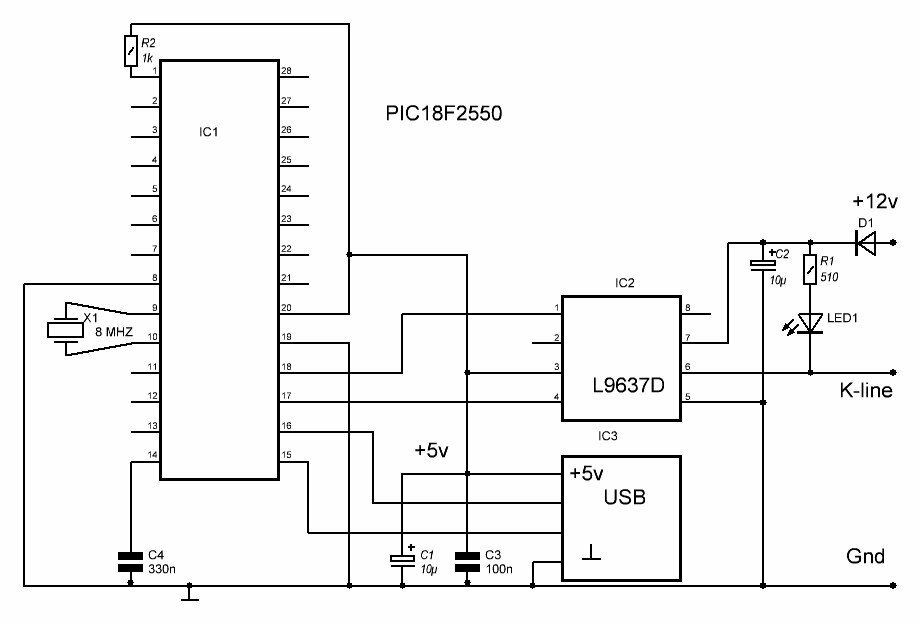
Минимально работающий USB/ k-line для Webasto Thermo Test V3 на PIC18F2550. pic18F2550.HEX