controller_m30
-
Постов
489 -
Зарегистрирован
-
Посещение
Весь контент controller_m30
-
Если вот прямо скопировать, то каких-то профессионалов разработки искать не нужно совсем. Отдаёте плату на копирование в Резонит, или какие-там ещё фирмы могут делать копии печатных плат. Заказываете у них платы без деталей - штук 10-20. Далее обращаетесь в мастерскую по ремонту телефонов или материнских плат ПК, с заданием перепаять компоненты "с вот этой платы - на вот эту". Предпочтительнее специалисты именно по мобилкам, так как плата секвенатора и мобилки наиболее похожи, и все инструменты у них есть (паяльные станции с нижним подогревом, микроскоп, флюсы и припои разного назначения, и т.д.) Получаете то о чём мечтали. Далее испытываете скопированную плату в работе. Если заработало сразу - приступаете к тиражированию. Если не заработало: 1. Вернуть все компоненты на родную плату, и проверить в работе её. Вдруг компоненты как-то повреждаются при пайке, или мастер их путает (он же ж не робот, как у Оксфордцев...) 2. Если родная плата работает по прежнему, тогда проверить оставшиеся копии плат, и по результатам сделать выводы. Либо менять производителя плат, либо паяльщика, или ещё что-то, ну там по ситуации. А профессионалы разработки тут не нужны. Это как нанимать профессора НИИ, чтобы переписать текст из книжки в тетрадку красивым почерком.
-
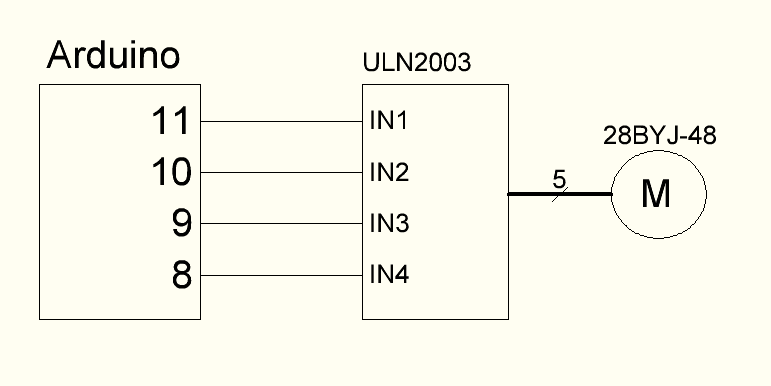
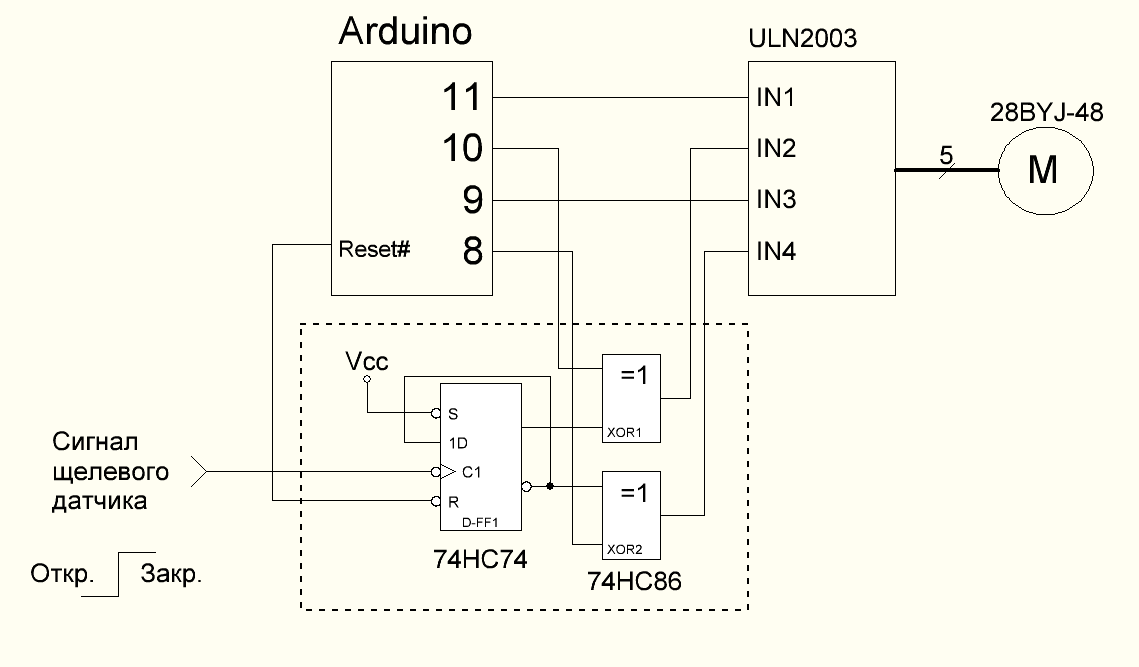
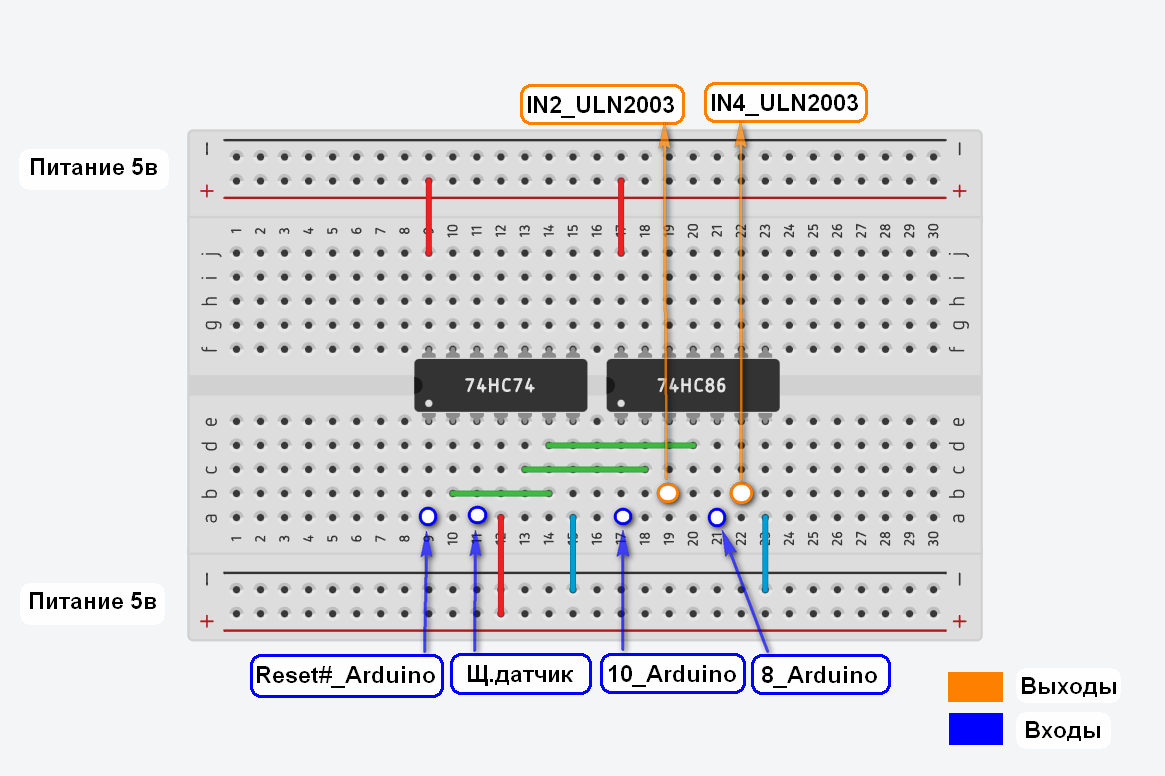
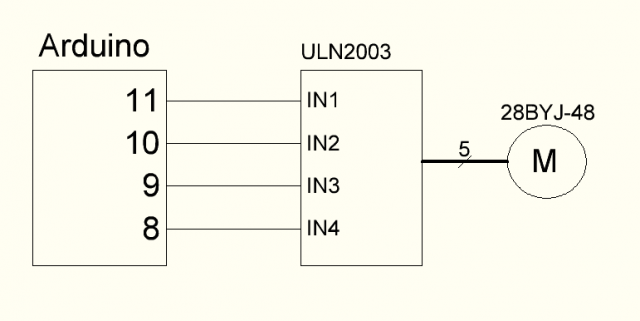
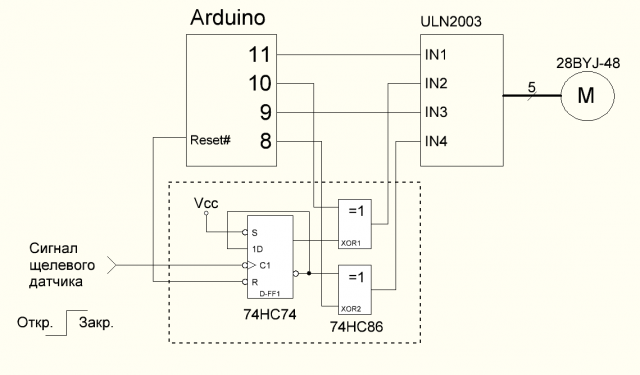
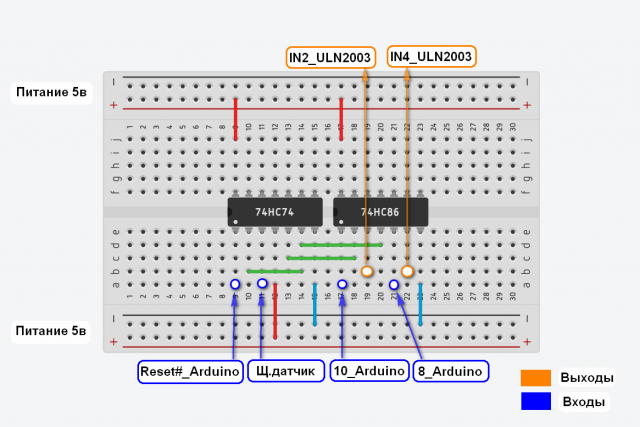
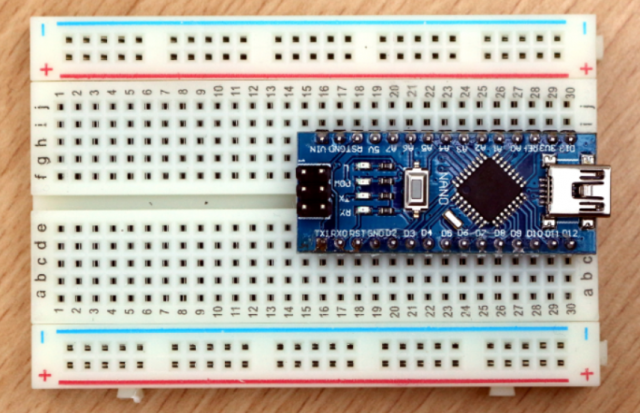
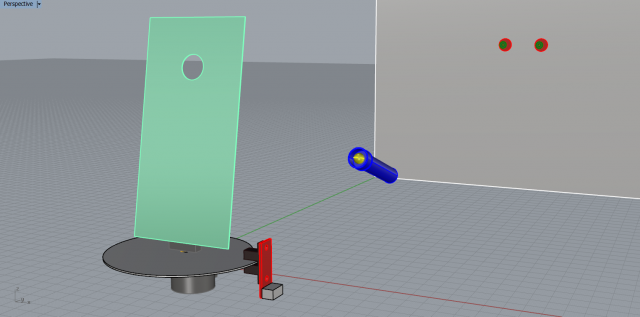
Вариант, как обойтись без программирования Arduino и сэкономить время на изучении программистских наук. И при этом сделать так, чтобы шаговый двигатель (ШД) реагировал на концевой датчик, и менял направление вращения. Это на тот случай, если к программированию совсем "не лежит душа", а что-то надо делать. В картинках. На момент предыдущего поста ТС схема управления ШД должна была выглядеть следующим образом. Если добавить две логические микросхемы, то можно изменять сигналы управления Шаговым Двигателем так, что по каждому сигналу от щелевого датчика - двигатель будет автоматически менять направление своего вращения. И не придётся программировать Arduino. Новая схема должна выглядеть вот так. В разрыв проводов идущих от 8 и 10 ножек Arduino включается схема обведённая пунктиром. Она будет "обрабатывать" сигнал и отправлять его далее на ULN2003. Сигнал переключения от щелевого датчика приходит в тот момент, когда достигается затемнённая часть диска. Это приводит к изменению направления вращения ШД в обратную сторону. И получается, что вращение зеркала будет всегда в границах прозрачной области диска. Arduino будет всегда крутить ШД только в одну сторону, а уже доп.схема по сигналу концевика будет менять вращение вправо-влево. Может возникнуть вопрос, а как это собрать новичку, не прибегая к паяльнику и изготовлению печатной платы? Это просто. В ассортименте товаров для Arduino есть макетные платы, на которых можно собирать целые схемы с помощью проволочных перемычек. На макетной плате эта доп.схема будет выглядеть так. И кстати, на такую макетную плату можно установить и саму Arduino Nano, и таким образом совсем "облагородить" собираемый макет. Итого, нужна макетная плата (желательно с набором перемычек), и две микросхемы в DIP-корпусе: 74HC74N и 74HC86N. Но даже если вариант с доп.микросхемами и не заинтересовал, то саму макетную плату (статья про макетки) я рекомендую всё-же купить. Это для того чтобы избежать превращения схемы в "клубок" из проводков и модулей, и скорого отламывания проводков из-за их частого сгибания и распрямления.
-
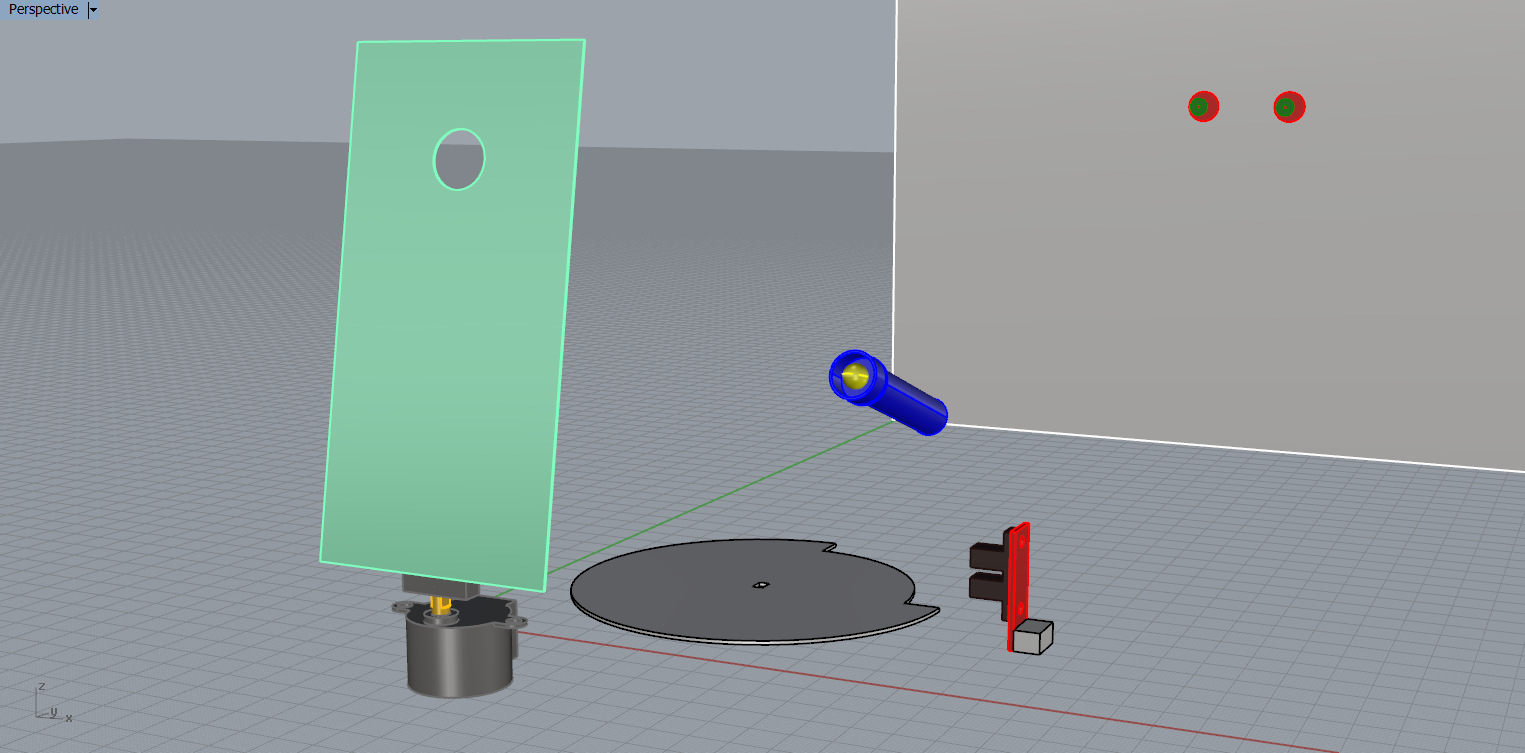
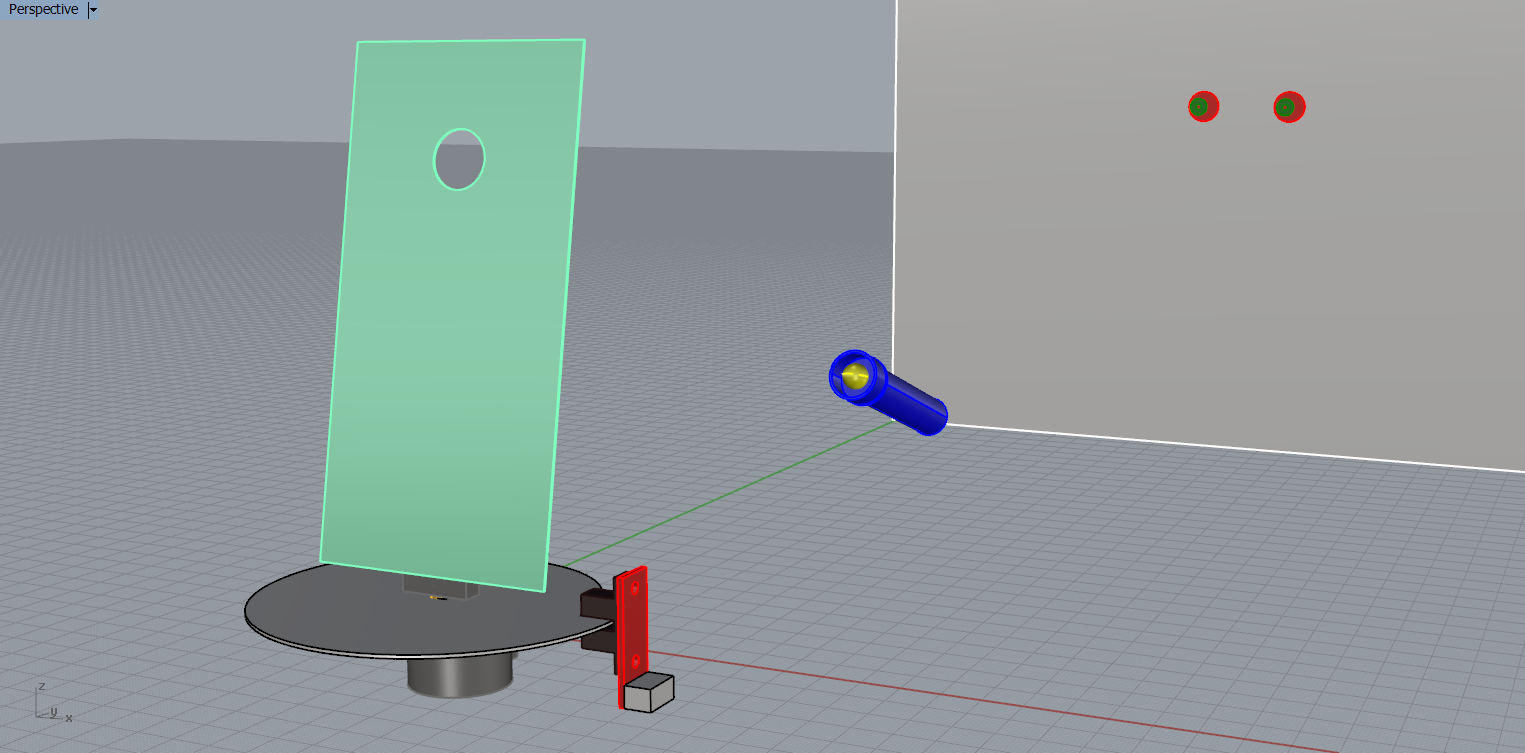
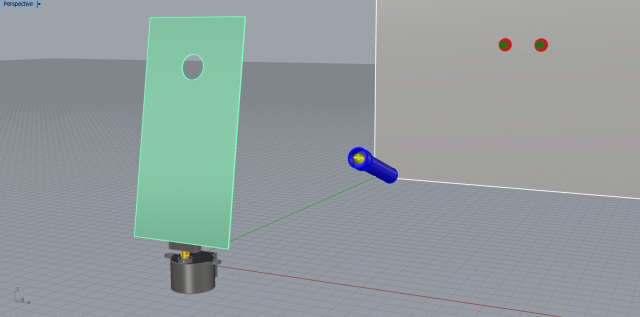
Да, нужен концевик, хотя бы один. На мой взгляд лучше всего бесконтактный датчик оптического типа, чтобы не нагружать и совсем не изнашивать пластиковые детали. Такой например. Его тоже надо подключить к Ардуино, и в программе как-то указать, что при смене сигнала с 0 на 1, или с 1 на 0, нужно выполнять какие-то действия. Например можно вот так добавить датчик и шторку к нему. Диск, выполняющий функцию шторки, можно изготовить хоть из плотного картона, или из пластика. А прозрачный пластик может быть удобен тем что непрозрачную часть можно просто перерисовывать маркером, или переклеивать кусочком изоленты, чтобы подбирать нужное положение. Исходное состояние. Как я понял из видео, элементы с шаговым двигателем расположены примерно так. Берём щелевой датчик и диск с прорезью (или прозрачный диск с раскраской в нужных местах) И так устанавливаем. Диск крепим на оси шагового двигателя. Как закрепить щелевой датчик, это надо смотреть на месте. Но поскольку он не испытывает никаких механических воздействий, то крепить его можно самыми разнообразными материалами - вплоть до картона или пенопласта.

-
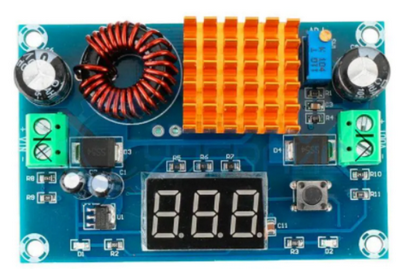
Да, да, конечно... Я тоже в какой-то момент вспомнил, что для сервопривода или шагового двигателя может понадобиться повышенное напряжение - и сразу понял, что тему с Arduino лучше по возможности свернуть, или отложить на более позднее время... Поэтому и предложил сначала обратить внимание на LEGO Technic Но если Вам интересно про повышение напряжения, то пожалуйста. Здесь нужен повышающий преобразователь напряжения. Продаётся обычно там-же где и Arduino. Пример того как он может выглядеть: Два контакта на входе IN или VIN (для 5 Вольт), и два контакта на выходе OUT или VOUT (повышенное напряжение для запитки серво или шаговика). Самый предпочтительный для Вас вариант, это третья платка с индикатором напряжения, и винтовыми клеммами для подключения проводов на вход и выход. Пример её в магазине и сколько ориентировочно она стоит (сам там не покупал, если что, ссылка только для примера). Из инструмента понадобится лишь тонкая отвёртка, чтобы закручивать клеммы, и крутить винтик потенциометра для регулировки выходного напряжения. Рекомендую Вам рассмотреть покупку именно этого варианта платы. А вот первая и вторая платки, потребуют ещё и покупки мультиметра и паяльника. Паяльник нужен для подсоединения проводов на вход и выход. А мультиметр для контроля напряжения на выходе преобразователя. Паяльник для примера приводить не буду, а пример мультиметра пожалуйста, вот он: DT-830B, продаётся очень много где: магазины электроники, хозтоваров, на рынке "на железках", и даже в канцтоварах его как-то встречал. Весьма распространённый и недорогой. Также есть вот такие преобразователи, в которых перемычками можно выбрать одно из 4 заданных напряжений: 5, 8, 9, 12 Вольт. На обратной стороне платы приведена табличка состояний перемычек, при которых будет выбрано одно из нескольких возможных напряжений. Достаточно паяльником (если он есть), или острым ножиком перерезать одну или обе перемычки. В этом случае не нужна отвёртка, но мультиметр для контроля всё-таки нужен. И второй момент. Поскольку используется Arduino, это значит что на столе получается эдакий клубок из проводков и модулей. Так вот - повышающие преобразователи, имеют "на борту" повышенное напряжение, которое при случайном касании к остальным модулям "клубка" Arduino-вской схемы - выведет из строя почти всё, к чему прикоснётся в этом "клубке"! Поэтому с повышающим модулем нужно обращаться крайне осторожно! Самая главная его опасность даже не в том, что он может "спалить" практически весь Arduino-вский макет (такое купить можно ещё, подумаешь), а в том что Arduino подключена к USB-порту компьютера, и попадание 9, 12, или например 35 Вольт в порт USB компа - может выжечь USB-порт, а то и испортить всю материнскую плату ПК. Это было бы очень и очень нехорошо. Моя рекомендация. Упрятать повышающий модуль в отдельную коробочку, чтоб из неё наружу выходили только изолированные провода. Или замотать его тщательно изолентой, или картоном и скотчем, и т.п.


-
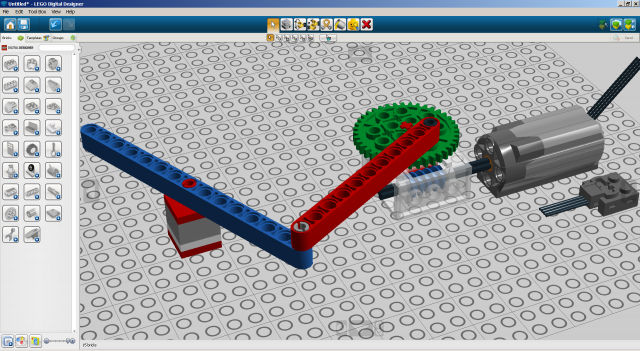
Кстати, кривошип это идея! Вот очень простой вариант её реализации. Конструктор LEGO Technic. Нужно взять: двигатель, червячный редуктор, и несколько деталек для самого кривошипа. Колёсико вращается, качелька синяя поворачивается вправо-влево. Что и требовалось. Всё это можно передвигать, переставлять, чтоб подобрать нужную амплитуду качания. Прикрепить зеркало к этим LEGO-деталям, думаю, проще чем к чему-либо. И главное, совсем не нужно: паять, сверлить, точить, резать и клеить... А просто соединить детали. Бюджет такого проекта вполне умеренный: мотор - 5 долларов, батарейный отсек (там-же) для мотора - 5 дол, червячный редуктор - 5 дол за 5 шт. Простые детальки: планки, оси, колёсико - наверное тоже в несколько долларов все вместе выйдут (я не стал искать, думаю найти несложно).