


controller_m30
-
Постов
489 -
Зарегистрирован
-
Посещение
Весь контент controller_m30
-
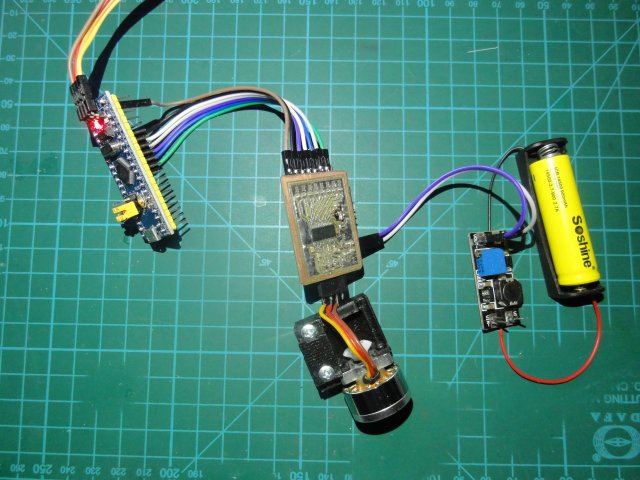
У меня ссылка не открывается, к сожалению (пишет у меня какой-то не тот доступ, или авторизация, хз). Но я записал своё видео, и фотку прилагаю. Пардон за не наилучшее качество видео, давно не записывал и разучился пользоваться фотоаппаратом. Но все главные моменты, по моему, там видны. Средняя скорость (Youtube) Малая скорость (Youtube) и фото всей схемы (за кадром остался ST_Link, от которого сверху тянутся провода) На средней скорости всё вроде-бы гладко. На малой скорости, там где видны магниты - заметно что они двигаются как-то рывками, не абсолютно равномерно. И на малой скорости обмотки греются гораздо сильнее, чем на средней. На ощупь, эдак, градусов 50-60. На средней может держать 40 градусов минут 5. А на малой буквально за минуту набирает 50-60 градусов.
-
Немного про движки для Gimbal-стабилизаторов. В профессиональном Gimbal-стабилизаторе камеры для квадрокоптера, применяются BLDC-движки с навороченным шлейфом. Можно предположить что 5 тонких дорожек, это сигналы от трёх датчиков Холла, и питание к ним. Ссылка на движки Aliexpress

-
Делал плавное управление BLDC мотором, от 0 Hz. Для хоббийной модели. Компоненты использовал такие: DRV8313 - драйвер мотора, с Aliexpress. STM32F103 - платка разработки (типа Arduino) из ближайшего радиомагазина. И, повышающий преобразователь до 12в, т.к. DRV8313 работает начиная от 8в и выше. Мотор как на картинке. МК использует таймер, с трёхканальным модулем сравнения, для генерации ШИМ. В памяти таблица синуса на 256 байт, скачанная откуда-то из инета, и программа просто движется по таблице, используя три указателя, отстоящие друг от друга на 1/3 размера таблицы. В DRV8313 сигнал заводится так, как это приведено в даташите на микросхему. Крутит от 0 до нескольких десятков оборотов в секунду. Можно управлять положением ротора как будто это шаговый двигатель. Недостатки. Обмотки ощутимо греются, возможно надо экспериментировать с ограничением тока, или рабочим напряжением. При полном проходе таблицы синуса движок делает небольшой рывок. Это заметно при сверхнизкой скорости вращения. В приведенном двигателе 12 катушек, и таблица позволяет плавно переместить ротор от одной катушки к другой. Всего на оборот получается 12 рывков. В чём причина пока не разбирался. Может скачанная таблица кривая, или я ею неправильно пользуюсь (например указатели должны отстоять точно на 1/3 длины таблицы друг от друга, а у меня таблица 256 байт, которая на 3 не делится).



