Xenia
-
Постов
4 848 -
Зарегистрирован
-
Победитель дней
3
Весь контент Xenia
-
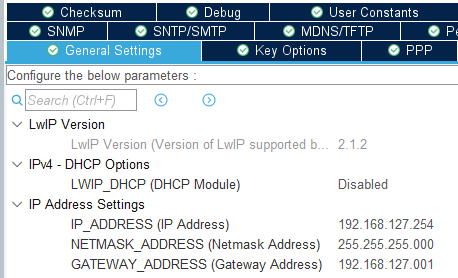
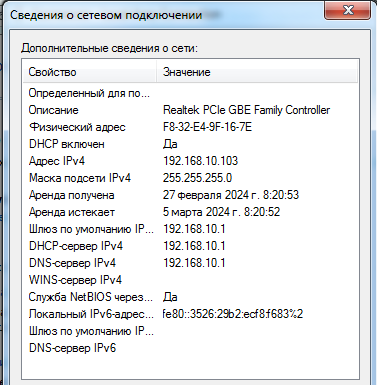
Из ваших объяснений не поняла, в каком месте надо выставить IP и какой. Но больше всего я боюсь, что, перенастроив ПК на связь с платой, я лишусь интернета. На эту мысль меня наводит тот факт, что на ПК DHCP у меня включен, а на плате выключен. Именно такой совет мне был дан: А пока DHCP на вкладке CubeMX не выключишь, статический IP адрес он ввести не дает. Вот оно как у меня: Тогда как в настройках ПК ситуация выглядит так:
-
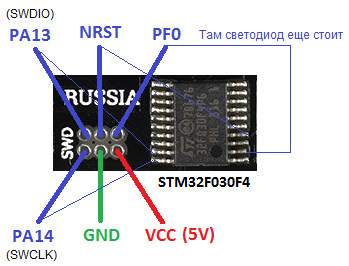
Российский SWD? Дело было так. Купила я себе (для проекта) отечественное изделие (на нем так и написано "RUSSIA") - силовой ключ под управлением контроллера STM32F030F4 и решила его перепрограммировать под свою специфическую задачу. Однако столкнулась с трудностью прошивки из-за того, что у этого модуля SWD-разъем (а точнее - только дырочки вместо него) размером 3x2 пина (итого пинов 6), а расстояния между ними малы - 1.27 мм. В начале рассчитывала спаять переходник с этого SWD на стандартный разъем J-TAG (10x2 пинов) по схеме, найденной мной в интернете: Но поскольку нумерации пинов на том разъеме не было, то решила прозвоном определить, где у этого разъема земля. Оказалось, что не с краю, а в середине! После этого стала прозванивать всё остальное и вот что выяснила: Распиновка этого SWD оказалась совершенно не той, что на схеме из интернета. Мой вопрос: кто-нибудь встречался с такой распиновкой? И как мне его теперь к J-Link'у подключать? (BOOT0 у этого контроллера в землю впаян, а SWO нет совсем)
-
Фазовые детекторы обычно используют на аналоговых сигналах (или чтобы хотя бы один из них был аналоговый), где фактически происходит их перемножение. Тогда как у меня оба сигнала цифровые, а в этом случае было бы вредной практикой работать и ними, как с аналоговыми напряжениями, а уж тем более использовать ГУН (VCO), как в микросхеме CD4046B из вашего примера. Лично я убеждена, что задачи с цифровыми/бинарными (двухуровневыми) сигналами имеют решение на том же цифровом уровне, не прибегая к их превращению в напряжения.
- 61 ответ
-
- 1
-

-
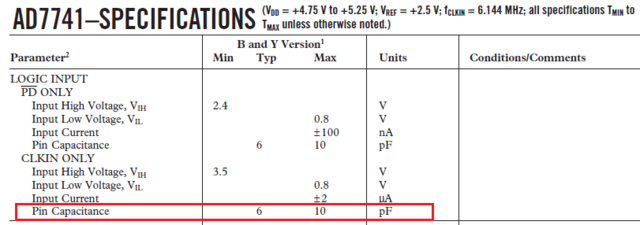
вопрос по AD7741
Xenia ответил yung тема в Вопросы аналоговой техники
В даташите на AD7741 пишут, что у нее ёмкость входа CLKIN составляет 6-10 пФ. Т.е. можно считать, что какая-то ёмкость там уже есть, что по идее не должно позволить победить 5-ой гармонике. Тем более что выводы у моего кварцевого резонатора довольно длинные (какую-то индуктивность они должны бы давать). К тому же это не часовой кварц, а кварц на довольно высокую частоту 6 МГц, у которого высшие гармоники совсем высоки. Может быть для их подавления и 10 пФ будет достаточно? Тем более когда инвертор у нее не столь быстр по времени переключения. P.S. Возможно не по делу, но у меня возникла сильная ассоциация с когда-то собранной мною схемой генератора частоты, состоящего из 3-х логических инверторов состыкованных в кольцо. А если быть более точной, то использовалась микросхема с 4-мя элементами 2И-НЕ (на подобие отечественной ЛА3), где 3 элемента работали в кольце в качестве инверторов, а 4-ый элемент выводил частоту из кольца на выход. Так вот мне так и не удалось получить этим способом частоту 45 МГц, как я ни старалась подобрать микросхемы. CD4011BE не дотянула даже до 1 МГц, SN74HC00N не дотянула до 10 МГц. Наибольшую частоту 25 МГц выдала SN74AS00N. Но более быстродействующей мне достать не удалось. Эта ассоциация возникла у меня из-за сомнения возможности получать высокие частоты на логических элементах, имеющих ограничение на скорость срабатывания.