adnega
-
Постов
3 594 -
Зарегистрирован
-
Посещение
-
Победитель дней
3
Весь контент adnega
-
VGA сигнал по HDMI кабелю
adnega ответил zombi тема в В помощь начинающему
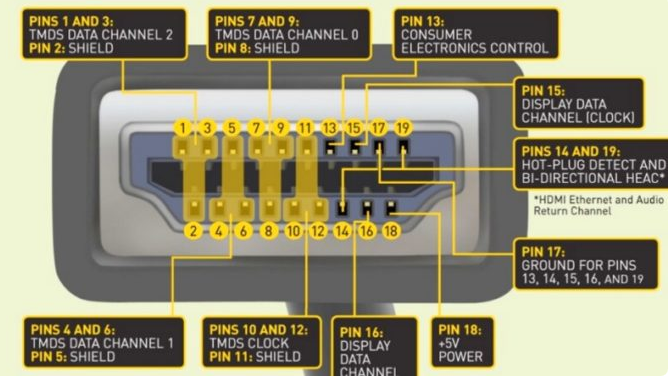
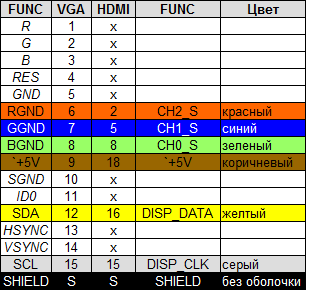
Я пользовался такой нумерацией

-
VGA сигнал по HDMI кабелю
adnega ответил zombi тема в В помощь начинающему
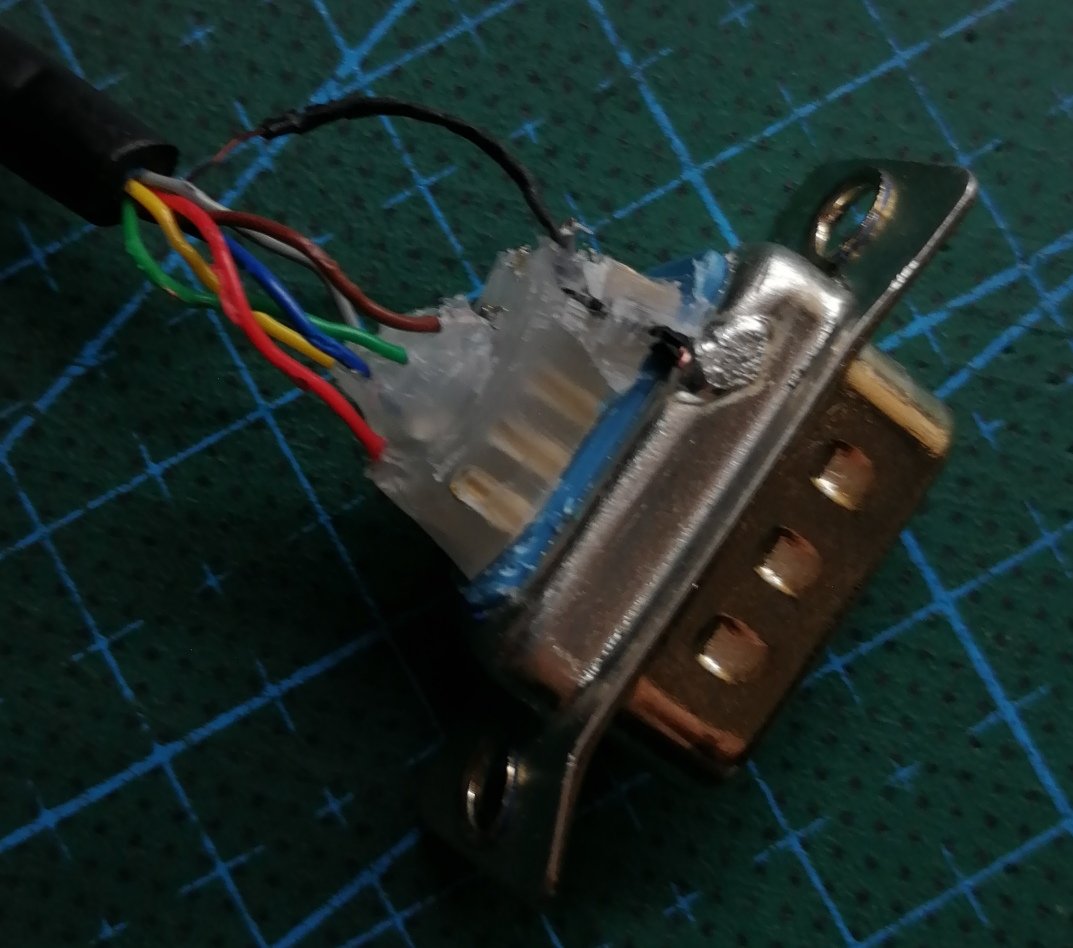
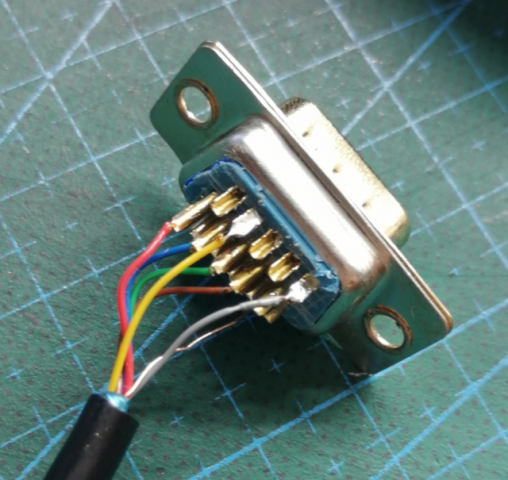
VGA доковырять до конца нервов не хватило )) Но, поверьте, там ничего нет, кроме проводов.

-
VGA сигнал по HDMI кабелю
adnega ответил zombi тема в В помощь начинающему
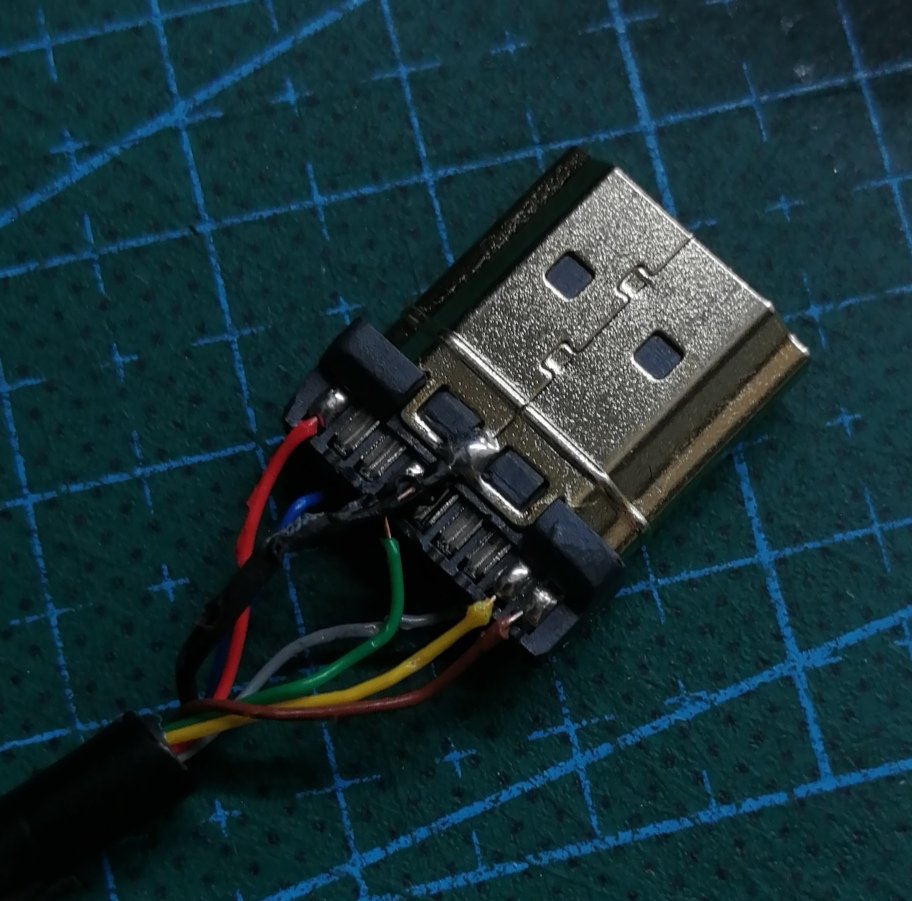
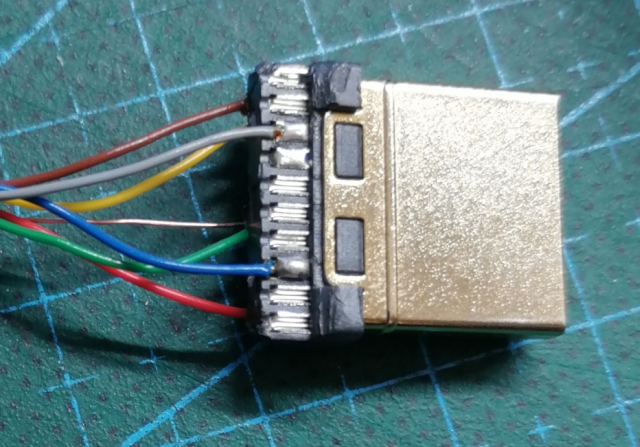
Все очень плохо :( Пробрасывает только питание и I2C. Может, там пассивка какая есть...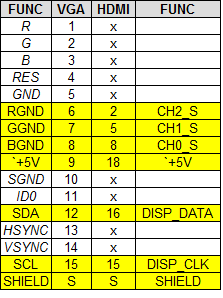
-
VGA сигнал по HDMI кабелю
adnega ответил zombi тема в В помощь начинающему
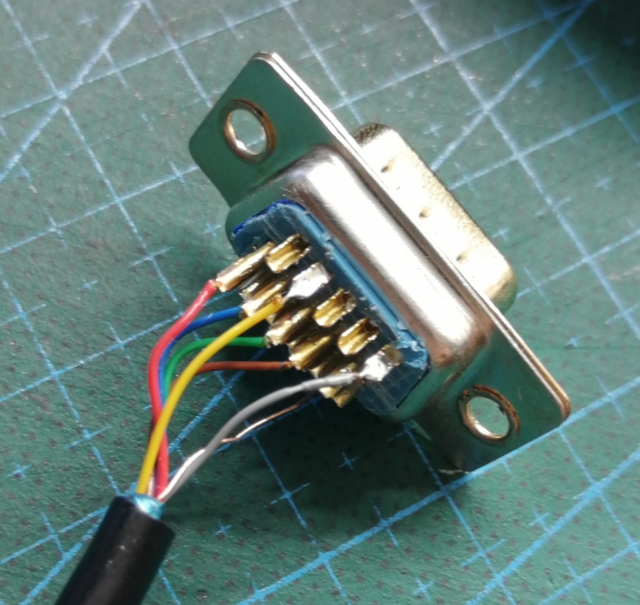
У меня есть интересующий вас кабель (см. фотку). Есть монитор SAMSUNG SyncMaster 205bw с нативным 1680х1050@60Гц. Вам распиновку кабеля сделать? Или попробовать VGA через него передать?