


=AK=
-
Постов
3 234 -
Зарегистрирован
-
Посещение
-
Победитель дней
5
Сообщения, опубликованные =AK=
-
-
приведите пожалуйста рассчеты по BER когда и что будет работать - чтобы можно было увидеть это на цифрах
Что ж, законная просьба. Это раздел для начинающих, где не все могут проследить ход рассуждений и проверить его сами.
Для примера, положим, что вы представили некую не очень сложную CAN систему на испытания по электромагнитной совместимости. В ходе испытаний ее, помимо прочего, должны проверить на EFT - Electric Fast Transients. В ходе испытаний ваш CAN кабель (терминированный с двух сторон сопротивлениями по 120 Ом) зажмут в "емкостные клещи". Положим, емкость связи клещей с каждым из проводов CAN составит 3 пФ, а суммарная емкость между линиями CANH, CANL составляет 1000 пФ. На эти клещи подадут от генератора помех импульсы с частотой 5 кГц и амплитудой 500В, 1кВ, 2кВ, а если запросите больше - то и с большей амплитудой. Нарастающий фронт импульсов 5 нс, длительность по уровню 0.5 составляет 50 нс, сопротивление источника 50 Ом.
Положим, так неудачно сложилось, что защитные TVS в вашей системе имеют разброс напряжения 5 В. Для симуляции я взял зенеры с напряжениями 10В и 15В. Посмотрим, каково будет дифференциальное напряжение на входах приемников при испытаниями импульсами 1 кВ (это уровень для бытовой техники):
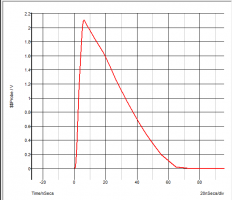
Напомню, такие импульсы будут появляться на входах приемников с частотой 5 кГц. Какой при этом будет BER - зависит от многих других факторов, но теперь вы сможете посчитать его сами для ваших условий.
-
Прокладывабтся и используются реальные кабели, на реальные километры и решаются реальные задачи.
Ну да, радиолюбители решают реальные задачи. И то, что они делают, реально работает - в определенных условиях. Ход ваших мыслей и аргументация на 100% совпадают с радиолюбительскими.
-
поясните каким образом ? вы считает что can не обнаружит сбой чтоли?
о чем вы говорите?
CAN обнаружит сбои. Однако если плотность помех такова, что сбой появляется в каждом пакете, CAN работать перестанет, поскольку все пакеты будут битыми. А RS485 с Модбасом или RS422 в этой же помеховой обстановке будут продолжать работать как ни в чем ни бывало.
-
Когда "трубка положена" - нагрузки нет вообще (поскольку по-любому есть разделительная емкость по DC, а переменной составляющей при отсутствии вызова нет, и постоянный ток не должен превышать 1 mA). При "поднятии" - подключается нагрузка (разговорная цепь), и станционная "батарея" обеспечивает протекание тока порядка 50 mA.
Когда трубка положена, включена звонковая цепь.
А вот если телефон вообще отключен, работает или нет?
-
Это где? Я максимум плохих условий видел в электричке.
Я максимум плохих условий видел лет двадцать с лишним назад в портовом кране. Где кабели RS485 проходили невдалеке от клацающих контакторов, коммутирующих моторы.
Все это абсолютно так же относться и к защите 485, которая точно так же не гарантирует точности ограничения. Только эти ограничения начинаются на уровнях12V в не 27V.
Нет, не "точно так же". Вы не понимаете, что защита RS485 срабатывает при пассивном состянии линии, когда на входы приемников может наводиться любой мусор. Поэтому не играет никакой роли, при каком напряжениии сработает защита. Весь мусор, наведенный в этом состоянии, будет отсеен правильным протоколом, например, Модбасом.
А защита CAN, в отличие от защиты RS485, должна срабатывать так, чтобы гарантировать рецессивное состояние на входах приемников. Ну а поскольку вы не инженер, а радиолюбитель, то вы не закладываетесь на худший случай, а наивно надеетесь на лучшее. Поэтому вы вообще не заботитесь о том, чтобы гарантировать рецессивный уровень при срабатывании TVS. Вам это просто в голову не приходит, делаете системы на "авось", прокладываете тонкие кабели километрами. Вы вообще только бакланить способны о мнимых преимуществах CAN. :(
-
Противофазная имеет уровень максимум 100мВ. При уровне доминантного бита в минимум 1.5В - запас огромный.
Кабель - не экранированный, не витой (типа КСПВГ). Узлов более 10. Общая длина порядка 50 метров. Топология смешанная,
в основном шина, с короткими и не очень ответвлениями. Местами используется UTP5. Соединения скручены и спаяны.
На концах терминаторы 120 Ом.
Я уже говорил в этой ветке, CAN вполне годится для УД. Несмотря на то, что его помехоустойчивость примерно на порядок хуже, чем у RS485 с Модбасом, однако для задач УД она вполне адекватна. Но не надо натягивать сову на глобус и голословно заявлять будто "CAN приемопередатчики БОЛЕЕ совершенны, нежели 485 и во всяких хреновых условиях и работают лучше", как тут делают некоторые радиолюбители.
-
Ваше нахождение драйвера с порядка 30 омами, назвать их 5 Омами, потом 25 Омами и объявить этот драйвер "типичным".
Опять врете. :twak: Названный SN75176 являяется вполне типичным драйвером, а его выходное при низком уровне доходит до 5 Ом. То, что вы неспособны посчитать динамическое сопротивление, а выходное сопротивление сводите исключительно к дифференциальному, ничего не доказывает.
даже 150 Омный драйвер вполне весь из себя 485, это раз. И то, что выходное сопротивление драйвера, на длинных линиях имеющих сопротивление сотни Ом, становится малозначащим фактором, это два.Драйвер с выходным 150 Ом существует разве что в вашем воображении - да и то потому лишь, что вы выходные характеристики оцениваете как радиолюбитель, не понимая, как надо иметь дело с нелинейными характеристиками. Если вы используете тонкий кабель на большие расстояния, то вы снижаете помехоустойчивость. Но у меня и в мыслях нет думать, что вы идиот, если так делаете. Я полагаю, что вы взяли кабель подешевле, а о том, что это снизит помехоустойчивость, не знали. Ну а сейчас вас просто жаба задушит поставить более подходящий кабель. :cranky:
Приемник CAN, как и приемник 485 может "похвастаться" тем, что очень хорошо давит именно синфазные помехи.Вы забываете, что они это делают в довольно узком диапазоне входных напряжений. А какой величины синфазное напряжение появится на входе приемника, сильно зависит от того, насколько хорошо линия "притянута" к земле.
RS485 в пассивном состоянии линия "болтается" в воздухе, на нее легко наводятся синфазные помехи. Если линия защищена, то никаких негативных последствий от этого не будет - при условии использования помехоустойчивого протокола обмена, такого как Модбас. Без такого протокола, как показывает практика, помехоустойчивость будет низкая.
Зато в активном состоянии, когда драйвер RS485 включен, его низкое выходное сопротивление эффективно гасит и синфазные, и дифференциальные помехи, за счет чего обеспечивается помехоустойчивый обмен. По этой причине интерфейсы на базе RS422, где передатчик всегда включен, демонстрируют отличную помехоустойчивость.
CAN, работающий в типовой схеме включения, все время "болтается" в воздухе. На линию легко наводятся синфазные помехи, которые вполне могут приводить к сбоям в обмене. Например, дешевый NUP2105, который вы используете для защиты CAN, имеет разброс напряжений порядка 5 В. Его изготовитель не дает никаких гарантий, что напряжения ограничения для обеих линий будут одинаковыми. Вы не понимаете, что наведенная синфазная помеха, после того, как NUP2105 ее ограничит, с легкостью может превратиться в ложный доминантный уровень на входах приемников. Отсюда и проистекает ваш оптимизм по поводу помехоустойчивости CAN, от непонимания. :01:
-
3) Типичное выходное сопротивление типичного 485 драйвера не "единицы Ом", а порядка 60 Ом.
Опять врете. Порядка 25 Ом дифференциального выходного для типичного драйвера SN75176. Но даже если бы это было так, то с учетом сопротивления двух терминаторов все равно в сумме было бы вдвое меньше, чем для CAN, у которого кроме терминаторов ничего нет.
Однако не одним только дифференциальным выходным характеризуется драйвер. Дифференциальные помехи очень хорошо подавляются самой витой парой. А синфазным помехам на витую пару начхать. Низкое выходное сопротивление драйвера RS485 хорошо гасит и этот тип помех. А чем может похвастаться CAN?
Раз уж вы завели речь о "типичных" случаях, то типичная схема применения CAN не имеет никаких средств для подавления синфазных помех. В типичной схеме с двух сторон шины стоят терминирующие резисторы по 120 Ом, это все. А встроенная схема смещения, которая мягко тянет линии CAN к половине питания, типично имеет сопротивление 20 кОм. Пусть даже в сегменте CAN стоит 100 узлов, суммарное сопротивление линии, которое увидит синфазная помеха в рецессивном состоянии составит 200 Ом. Что примерно на порядок хуже, чем выходное сопротивление шинника RS485. Причем, в шине RS485 может быть хоть два узла, низкое выходное шинника от этого не станет выше, синфазная помеха все равно будет отлично гаситься.
Ну и результаты получатся соответствующие. Даже сравнительно небольшие внешние EFT помехи легко вышибут напряжения на линиях CAN за пределы допустимых. Защищать шину придется внешними элементами, т.е. TVS, использовать экранированный кабель, ставить common mode chokes, и т.п. . Кроме того, к параметрам TVS будут предъявляться жесткие требования по согласованию, иначе наведенная синфазная помеха, клиппированная рассогласованными TVS может создать ложное доминантное состояние на входах приемников. Соответственно, стоить такие элементы будут недешево.
Ну а для RS485 этих проблем нет. К защите не предъявляются требования по согласованности, что угодно сгодится. Дешевые мощные TVS защищают RS485 надежно.
Некоторое улучшение помехоустойчивости CAN дают split-терминалы. Однако с этими терминалами больше мороки.
-
Опубликовано · Изменено пользователем Herz · Пожаловаться
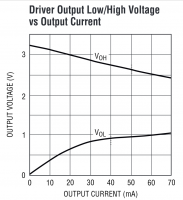
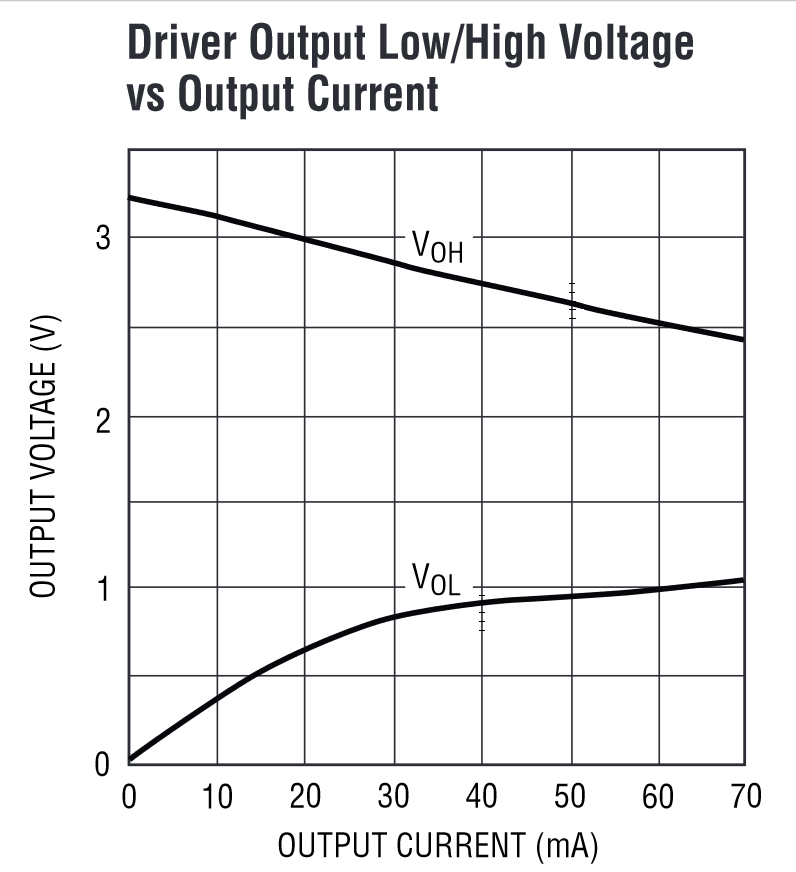
Оно и не состовляет единицы Ом. Диапазон (в зависимости от типа драйвера и напряжения питания драйвера, от 35 до 150 Ом).Вам, как утонченному любителю дорогих трансиверов, должен понравиться LTC2845. Вот его выходные характеристики, в низком уровне - примерно 5 ом на участке 40-50 мА, в высоком уровне - примерно 12 Ом на том же участке.
-
Любое дело можно угробить. Я, например, абсолютно уверен
Вы и про выходное сопротивление передатчиков RS485 были уверены, что оно "не составляет единицы Ом", пока вас не ткнули носом в даташит. А пример Caraca и Velleman-а довольно наглядно показывает, что CAN (и уж особенно "голый" CAN с самопальным протоколом) - это никак не панацея и не решение всех проблем УД.
-
Любое дело кто-то должен начать первым.
Любительские УД на CAN тоже известны. Был такой Caraca - CAn Remote Automation and Control with the AVR. Хороший пример того, что значит строить самопал на голом CAN-е. Разработчики его еще в 2000 году забросили. Первооткрыватели, ага. В это время еще и KNX-а даже не было, его предтеча EIB только-только "набирал обороты". А VelBus - не знаю, наверное, уже был. Он явно не молод и не выглядит успешным, не видно что-то, чтобы использование CAN дало Velleman конкурентные преимущества. 165 работников, оборот 37 миллионов, это немного.
-
485 для УД - это анахронизм, особенно при наличии микропроцессоров ценой в доллар (stm32f103), где CAN уже аппаратно вшит с майлбоксами и буферами.
Из всех "фирменных" интерфейсов для УД только про один известно, что он сделан на CAN - это VelBus от бельгийской компании Velleman. Остальные используют или специализированные интерфейсы (KNX/EIB, C-bus, LonWorks, и т.п.), или же бесхитростно ставят RS485. Скажем, для счетчиков электроэнергии выход RS485 - это стандарт, какой счетчик "с мозгами" не посмотришь, обязательно есть RS485.
Ну и шинник CAN, он ведь тоже примерно доллар стоит.
-
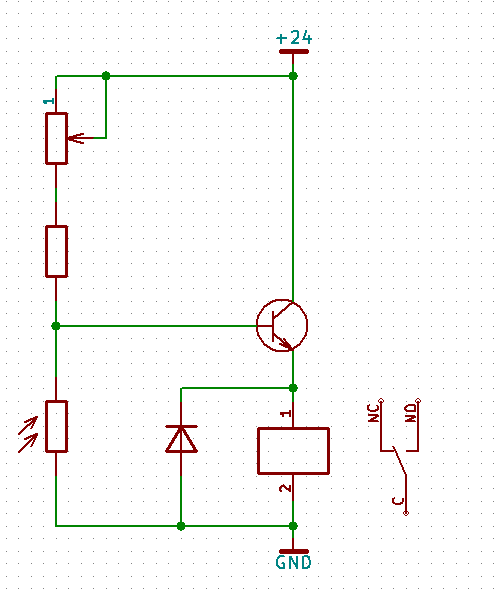
Эти фотодиоды не выдержат 24 В. К тому же чувствительность у них очень низкая.
-
Опубликовано · Изменено пользователем =AK=
Грубость. · ПожаловатьсяХорош [censored] про бузину в огороде и дядьку в Киеве. Полную свою дурь не позволяющую даже разобраться в том какой из графиков к чему относится, уже показали. Достаточно.Ага, шикарно, слив пошел. Отсутствие аргументов компенсируется ненормативой лексикой. :tongue: Но за мной должок. Обещал посчитать - ща посчитаю.
Приемник CAN в рецессивном состоянии. Линия терминирована с двух сторон резисторами по 120 Ом, в полном соответствии с рекомендациями. Чувствительность приемника 1 В, такое дифф. напряжение он примет за доминантное состояние. Мощность наведенной помехи должна составить 16.7 мВт. На самом деле порог срабатывания ниже и помехоустойчивость чуть меньше, но уж не буду мелочиться.
Работающий передатчик RS485. Линия тоже терминирована с двух сторон резисторами по 120 Ом, дифф напряжение на линии 2.5 В. Через терминирующие резисторы при этом течет ток около 40 мА. Чтобы вызвать ложное срабатывание приемника, помеха должна уменьшить дифф напряжение на линии как минимум до нуля. Передатчик, естественно, будет этому противиться и выдаст ток примерно 90 мА. Мощность наведенной помехи должна быть порядка 125 мВт.
В этих условиях RS485 не в 100 раз более помехоустойчив, чем CAN, признаю. Он всего в 7.5 раз более помехоустойчив.

-
Опубликовано · Изменено пользователем Herz
Грубость. · ПожаловатьсяИ когда за счет "правильной" нелинейности на НЕПРАВИЛЬНОМ графике было лихо насчитано 5 Ом.Хе-хе, и график "неправильный", раз уж наглядно демонстрирует выходное сопротивление 5 Ом вместо выковырянных из вашего самого натруженного места 150 Ом.
В линейной части сопротивление меньше.Там две "линейные части". На одной динамическое сопротивление сопротивление 25 Ом, на другой около 200 Ом. И вообще, усвойте, что более менее линейные части есть на всяком нелинейном графике, надо только масштаб увеличить. Поэтому заунывные повторы про "линейную часть" ничего кроме вашего невежества не доказывают.
-
Следовательно из 256 вариантов байта необходимо зарезервировать несколько значений для признаков начала (или конца) фрейма и, возможно, каких-то других управляющий символов.
Если массивы не очень большие, не более 255 байт, то проще всего использовать COBS. Тогда появление в потоке 0 будет означать "конец сообщения", этого будет достаточно. COBS можно применять и для длинных сообщений, но тогда продется заводить отдельный буфер для кодирования, ибо в процессе кодирования длина сообщения может немного увеличиваться. А для коротких сообщений заранее известно, что после кодирования COBS длина сообщения увеличится ровно на 1 байт, поэтому можно без дополнительного буфера обойтись.
-
Опубликовано · Изменено пользователем Herz
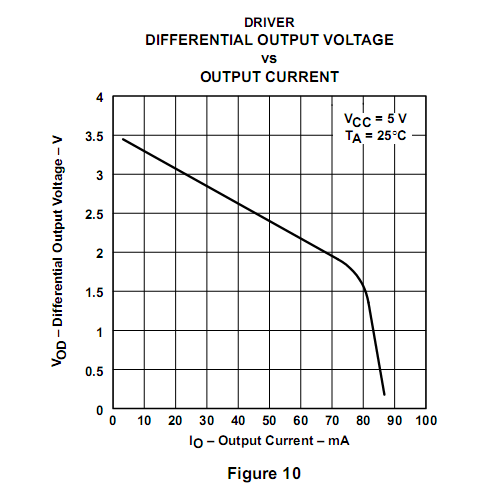
Грубость. · ПожаловатьсяFigure 3. Driver Differential Output Voltage Figure vs Output Current. На нем, естественно, совершенно прямая линия.А этот график тоже нелинейный. Я догадываюсь, что только ваша врожденная скромность не позволяет вам его привести:
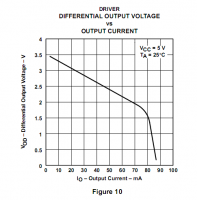 На линейном участке - порядка 25 Ом
На линейном участке - порядка 25 ОмДавеча вы что-то про "чудесный 485 передатчик с выходным порядка 150 Ом" гундосили. Неужто что-то дошло? Поздравляю.
И еще о достижениях. Про кабель вы в два раза соврали, а про выходное в 6 раз. Впрочем, вы-то не дифференциальное выходное там "считали", а просто выходное, которое всего 5 Ом. Ой-вэй, соврали в 30 раз. Это рекорд покамест.
-
AWG 24 - типичный кабель, в том числе и выпускаемый для ответственных и тяжелых условий эксплуатации.
У AWG24 сопротивление 84 Ома на километр, а не "200 с гаком". Больше чем в два раза соврали, вах, молодец какой.
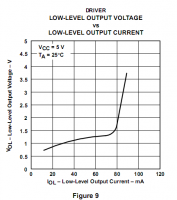
Для этого, как уже писал, достаточно загянуть в документацию. Например, приличный производитель TI приводит график зависимости выходного напряжения драйвера от тока - смотрите в приложении. График показывает, что, ествественно, никаких "единиц Ом" там и близко нет. И вообще зависимость де-факто практически линейна, так что динамическом вообще говорить не приходится.Какого драйвера?
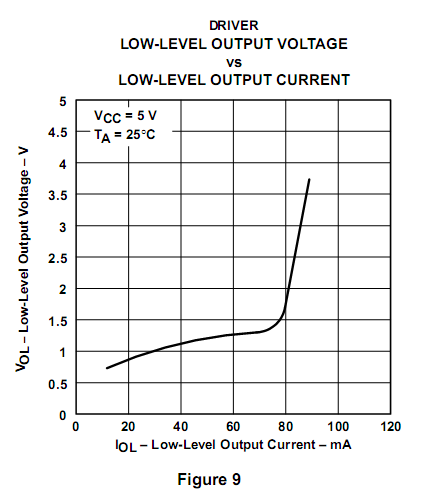
Вот выходная характеристика драйвера старого доброго SN75176B. Для тех у кого руки кривые, может, она и выглядит линейной. :rolleyes: На участке от 60 до 70 мА выходное напряжение меняется примерно на 50 мВ, что дает динамическое сопротивление порядка 5 Ом. Или даже меньше.
 Сопротивление CAN шины в данном состоянии (хотя вообще-то есть и активное состояние :) ) близко к сопротивлению терминатора. На кототких расстояниях и толстенных кабелей для которых Вы тут жалко пытаетесь наводить тень на плетень - к параллельно соединенным терминаторам - 50 Ом. Выходное сопротивление чудодейственного 485 передатчика, как видно по графику - порядка 60 Ом, ну и, конечно, тоже терминаторы.
Сопротивление CAN шины в данном состоянии (хотя вообще-то есть и активное состояние :) ) близко к сопротивлению терминатора. На кототких расстояниях и толстенных кабелей для которых Вы тут жалко пытаетесь наводить тень на плетень - к параллельно соединенным терминаторам - 50 Ом. Выходное сопротивление чудодейственного 485 передатчика, как видно по графику - порядка 60 Ом, ну и, конечно, тоже терминаторы.Так где, говорите, Вы увидели ДАЖЕ в ПРИДУМАНЫХ и притянутых Вами за уши идеальных условиях для 485 и ВЫКИДЫВАНИИ Вами из рассмотрения приемников, "выигрыш примерно 100 раз по мощности помех"?
Вы даже не понимаете, что надо считать. А считать надо мощность наведенной помехи, которая вызовет ложное срабатывание приемника. CAN в рецессивном состоянии, пассивное состояние линии задается сопротивлениями подтяжки. Эти резисторы будут определять, насколько помехоустойчив CAN. А терминаторы - это так, сбоку припека. Но на ламеров терминаторы гипнотизирующе действуют, это да.
Вот и сравните, какой мощности должна быть наведенная помеха, чтобы при рецессивном состоянии шины CAN приемник увидел доминантное состояние. А потом посчитайте, какой мощности должна быть помеха, чтобы при работающем передатчике RS485 приемник увидел противоположное состояние. Тогда и увидите выигрыш в 100 раз.
-
а какой фоторезистор взять что бы при 20 люксах реле включалось, при 300 выключалось
С большим сопротивлением, например, VT90N4. А если хотите чтобы точно включалась и выключалась при определенной освещенности, то придется более сложную схему использовать. В которой пороги срабатывания по-отдельности настраиваются.
-
Опубликовано · Изменено пользователем Herz
Грубость. · ПожаловатьсяВот прямо сейчас недалеко от меня находится всего 1200 метров витой пары ... сопротивление витой пары 200 гаком Ом200 с лишним Ом на 1.2 км - вы с дуба рухнули, что ли? У вашего кабеля диаметр жилы всего порядка 0.3 мм. Вам не следует собственную безграмотность при выборе кабеля приводить в качестве аргумента, это смешно выглядит. Лучше бы спросили здесь на форуме у знающих людей, вам бы подсказали, что тонкие высокоомные кабели крайне глупо класть на большие расстояния. Возьмите какой-нибудь стандартный кабель для Профибас с проводниками 22 AWG, у него сопротивление всего 53 Ом/км. А вообще-то на расстояние порядка километра лучше класть кабель с проводниками 20 AWG, то есть, с диаметром жилы более 0.8 мм. У него сопротивление всего 33 Ом/км. Как вариант, попробуйте стандартный KNX кабель.
Если вы начнете оправдываться, что для оценки сопротивления, которое "видит" помеха, считали сопротивление кабеля туда и обратно, то это еще смешнее.
1) Можете повторить рассчеты исходя из того, что его выходное сопротивление ровно 0 Ом :).Корректная оценка должна делаться усредненно для всего кабеля. На дальнем конце километрового кабеля 20 AWG помеха видит 33 Ома, на ближнем 0, в среднем 16.5 Ом. Это существенно меньше, чем сопротивление шины CAN в рецессивном состоянии. А в типичных применениях, на расстояниях порядка 100 м, когда сопротивление кабеля еще меньше, всего лишь единицы Ом, как раз и получится для RS485 выигрыш примерно 100 раз по мощности помех.
-
чудесный 485 передатчик с выходным порядка 150 Ом (на нагрузке 100 Ом от 5V питания остается 2V ) и 100 омный терминатор.
Вы, очевидно, не знаете, что такое выходное сопротивление и как его считать. Для подавления помех главную роль играет динамическое выходное сопротивление, которое для передатчика RS485 составляет единицы Ом. А на величины напряжений, который вас сбивают с толку, влияют защитные элементы, которые не вносят большого вклада в динамическое выходное сопротивление.
Те, кто учился в институте на радиотехнических специальностях, знают, что динамическое сопротивление диода R=Ф/I, где Ф - это тепловой потенциал, равный примерно 25 мВ при комнатной температуре. Соответственно, при 10 мА тока обычный кремниевый диод имеет дифференциальное сопротивление примерно 2.5 Ом. Однако при этом на нем падает около 0.6В, и если не бельмеса не понимать в электронике и считать так, как вы считаете, то его сопротивление окажется равно 60 Ом. Ну а поскольку последовательно с выходными транзисторами передатчиков RS485, несомненно, включены диоды, а в сами передатчики встроена защита от к.з. и перегрева, то на людей таких же несведующих как вы, не привыкших оперировать нелинейными характеристиками, это производит шоковый эффект и вызывает полную дезориентацию.
Не расстраивайтесь. Ошибка, которую вы совершили в своих рассуждениях, типична для всех, кто не осилил электронику далее закона Ома.
-
Какой, оказывается волшебный MODBUS! получает "испорченный бит в любом пакете" и работает "как ни в чем ни бывало" это безусловно чудо!
"IQ хорош, но мог бы быть трехзначным" (с) Вы не понимаете пока, поэтому всякие глупости несете. Ничего, я еще раз объясню.
В той помеховой обстановке, где у CAN окажется битым каждый пакет, у Modbus+RS485 не будет битым ни один пакет. Мусор, наведенный на линию, пока все приемопередатчики настроены на прием (это то, о чем вы так наивно и трогательно беспокоились), будет проигнорирован за счет грамотно построенного протокола Modbus. А сами пакеты окажутся целехонькими за счет того, что включенные передатчики RS485 имеют низкое выходное сопротивление и при 0, и при 1, за счет этого помехе надо иметь примерно в сто раз большую мощность по сравнению с CAN,чтобы создать ложный сигнал в линии.
Да вы не упрямьтесь, почитайте Модбас, все-таки есть шанс, что до вас дойдет, как он работает.
-
Рекомендую так-же подумать насколько хороша помехосутойчивость линии передачи 485 во вполне естественном для нее состоянии с отключенными передатчиками.
А вы почитайте, как Модбас устроен, тогда и аргументов таких глупых не будете изобретать.
CAN при определенном уровне и плотности помех вообще не сможет работать. Для этого достаточно обеспечить уровень помех, когда испортится хотя бы один бит в любом пакете CAN. А Модбас+RS485 в этих же условиях, и даже при гораздо более мощных и плотных помехах будет работать как ни в чем ни бывало.
Очень странно, рассуждая о линии связи, рассматривать ТОЛЬКО передатчик закрывая глаза на приемник.Ваше удивление объясняется тем, что вы не разбираетесь в вопросе. Если бы разбирались, то знали бы, что характеристики приемника практически не играют роли в таких помехоустойчивых интерфейсах, как Modbus+CAN, поэтому можно их и не упоминать.
-
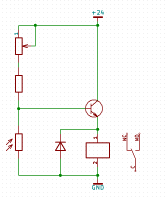
Лучше транзистор в режиме эмиттерного повторителя. Тогда срабатывание и отпускание будут более стабильными, малозависящими от температуры и параметров транзистора. Еще гистерезис будет лучше выражен.

хочу по витой паре передавать до 100 метров данные
в Интерфейсы
Опубликовано · Пожаловаться
Что бы это значило?
В этих условиях будет непосредственно зависеть от бодовой скорости, коль до вас еще не дошло. Для низких скоростей - близко к 100%. Но можете продолжать требовать BER, не указывая бодовой скорости, начинающим это простительно.
Как там в стандартах? Если правильно помню, "устройство класса Б" - это которое сбивается при подаче помех, но восстанавливает работоспособность при снятии помех. Никаких возражений, все законно. Просто это не "устройство класса А", работоспособность которого вообще никак не нарушается при подаче помех.