Variant99
-
Постов
181 -
Зарегистрирован
-
Посещение
-
Победитель дней
5
Весь контент Variant99
-
Если бы jcxz хоть раз делал бы частотный привод, он бы знал, "насколько оперативно" надо :))) А коль спрашивает - значит не делал. :)))
-
А один участвующий поцык тут обещал "~1 такт (ARM)" 🙂 А тут уже и 8, и 30 тактов. Эх, вот так и верь ...
-
Спецам по MIDI протоколу. Аккорды
Variant99 ответил Trashy_2 тема в В помощь начинающему
Аккорд - это одновременно взятые три или более ноты. В MIDI нет специальной команды для описания аккорда (нескольких нот), а значит, аккорд образуется передачей последовательно трех-четырех команд NoteOn. Да, возможно, нужно перед этим отправить команду Poly On.- 4 ответа
-
- 1
-

-
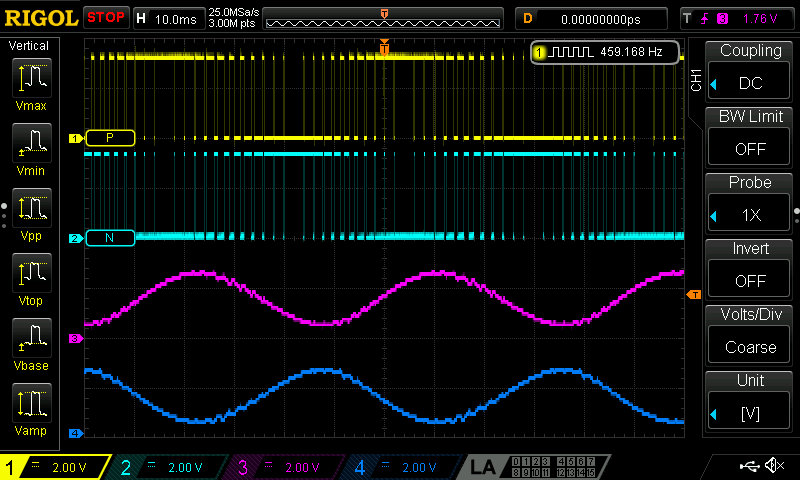
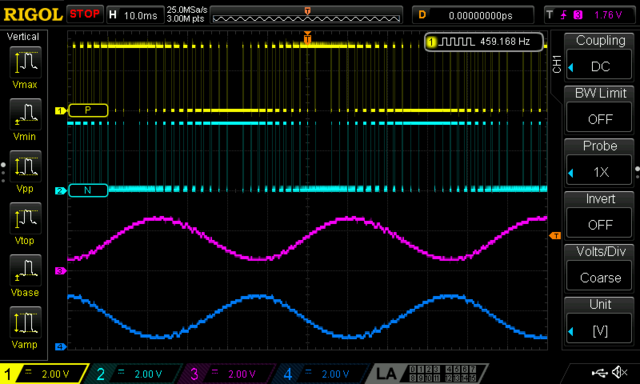
Да всё нормально делает топикстартер. Он просто вначале сумбурно описал хотелки, я тоже мало чего понял вначале, какие там "треугольники" и что конкретно не получается. Но на последней его фотке видно, что он получил. И как оказалось, всё в поряде изначально, просто на осцилле неверно настроил захват сигнала и картинка неверно его информировала. Так что всё норм. Ширина импульса меняется по синусоидальному закону, с тем, чтобы на выходе ШИМ поставить RC-фильтр и получить отфильтрованнное напряжение, изменяющееся по синусоидальному закону. Вот типа такого: Топикстартер использует три канала, это наводит на мысль, что он пытается крутить трехфазный BLDC-моторчик.
-
правда-правда. Вначале посмотрите, что там написано, потом будете писать очередную глупость. Автор конечно написал мессагу так, что ничего непонятно, какие "треугольники счета" и что именно не получается. Возможно, невыставленный бит предзагрузки OC1PE, возможно, слишком долго идет расчет флоатов, возможно, вообще неверно построил алгоритм. Нет особого смысла высчитывать в каждом приращении угла синусоиды новое значение, можно брать из заранее просчитанной таблицы для периода. Или полупериода. Или даже четверти периода. Функция то симметричная по двум осям. Перезаписывать новым значением регистр CCR1 нужно с частотой шагов приращения угла синуса, то есть, от второго таймера, задающего частоту синусоидального сигнала, получаемого в результате фильтрации ШИМ. Вообще, ШИМ - это ШИМ. Его частота - это частота ШИМ, влияющая на фильтрацию выходного сигнала. А частота синусоидальной огибающей выходного сигнала, получаемого после фильтрации ШИМ - это уже другая частота, она не связана с частотой ШИМ. Вернее, она конечно может быть кратна ей, но это частный, необязательный случай.
-
Дисплей 1.5 inch OLED с драйвером SSD1327.
Variant99 ответил Kiril тема в Программирование
Не знаю, как вы, но я бы начал с изучения документации на микроконтроллер LPC2148.pdf - Yandex.Documents Затем прочел бы документацию на дисплей SSD1327_datasheet.pdf - Yandex.Documents Потом, глядя в реализованный пример для СТМ, попробовал бы переписать его с учетом работы с периферией другого микроконтроллера. Переписать нужно то, что относится к работе с портами ввода-вывода и используемым интерфейсом (SPI, I2C). Всё остальное должно работать без переписывания. PS. Интересно, а кто с этим не согласен, что поставил "минус"? Автор чтоль? Ну а что он хотел то, он же спрашивал, с чего начать. Ну. Начинать надо с начала. Микроконтроллер (не микропроцессор!) довольно древний и непопулярный, поэтому навряд ли кто поможет готовым кодом, это редкость. Дисплей же хоть и не самый распространенный, но на него есть готовый пример, а во-вторых, все дисплеи этого производителя работают одинаково, даже коды команд совпадают. Отличие от мега-популярного SSD1306/1309 разве что в том, что тут есть 16 градаций яркости пикселя и один пиксель представлен 4-мя битами, а не одним. То есть, в байте не 8 пикселей, а только 2. Ну и число строк увеличено в два раза. Чаще всего дисплей подключается по SPI или по I2C. По SPI - легче написать. Интерфейс подключения задается микроперемычками на плате (впаиваемые нуль-резисторы). На плате должно быть подписано положение перемычек. Лучше всего подключить по SPI. Затем написать отправку байта по SPI и дергание ногой для D/C. После этого отправить в дисплей при D/C = 0 байты 0xAB, 0x01, 0xAF и, если всё сделано правильно, то дисплей должен включиться и отобразить произвольный набор пикселей. Далее всё делается четко по мануалу, по таблице команд - выставить нулевые адреса строки и столбца, нулевой номер строки, настроить мапинг, то есть ориентацию, ну и выставить D/C = 1 и начать отправлять байты изображения. Или сделать так, как описано в файле OLED_Driver.c примера. Написание же функций построения линий, фигур, вывод шрифтов - это отдельная и объемная тема, требует знаний и опыта программирования в целом.- 3 ответа
-
- 3
-

-

-
Как точно настроить кварц на его частоту
Variant99 ответил RR2021 тема в Схемотехника
А частотометр насколько точно саму частоту измеряет? Это отсыл к тому, чтобы почитать доки к частотометру и узнать его погрешности. Как минимум, ±1 ед.младш.разряда будет, а то и больше, да плюс процент от полной шкалы. --- Чел спрашивает, как ТОЧНО настроить частоту, а ему советуют - вскройте корпус, надфилем спилите или графита насыпьте :)))) Вообще, обычные кварцы - ±20 ppm (долей на миллион) или 0,002%