syoma
-
Постов
2 476 -
Зарегистрирован
-
Посещение
-
Победитель дней
1
2 Подписчика


Информация о syoma
-
Звание
Гуру
")
Посетители профиля
15 803 просмотра профиля

-
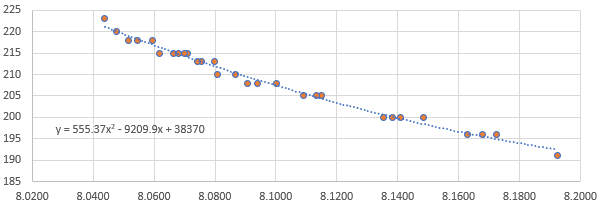
Привет всем. Надеюсь, что это правильный форум, так как дело касается в большей степени обработки результатов измерений. В общем есть электронный черный ящик с усилителем, который требует финальной настройки путем запаивания нужного фиксированного резистора в одну из цепей на финальном этапе. Процесс происходит так: 1. Настройщик включает устройство и измеряет выходное напряжение. Допустим оно равно 8.0475 В. 2. Настройщик смотрит в таблицу и находит соответствующий номинал резистора который нужно запаять для данного напряжения. Например у него записано, что для напряжений в диапазоне 8.045-8.050 нужно запаивать 220 кОм. Запаивает его. 3. Настройщик измеряет выходное напряжение опять. Оно должно быть в пределах 6.990-7.010В. 4. Если оно выше или ниже этих уровней - этот резистор выпаивается и впаивается другое ближайшее сопротивление выше/ниже номиналом. Предполагается, что требуемое сопротивление зависит от измеренного выходного напряжения до установки согласно полиноминальной зависимости. Проблема в том, что таблица почему-то перестала давать правильный результат и частенько настройщик должен перепаивать сопротивление два, а то и три раза, чтобы попасть в нужный диапазон. Предположим, что схему устройства мы не имеем возможности изучить, а имеем только исходную таблицу с рекомендуемыми резисторами и можем также записывать историю реальных измерений и результатов настройки по типу таких: U, В R, кОм Uстаб, В 8.0438 223 7.0016 8.0708 215 7.0014 8.1002 208 7.0001 8.1384 200 6.9961 8.0546 218 6.9990 8.0907 208 6.9963 8.1150 205 6.9960 8.0799 213 7.0054 8.0679 215 6.9988 8.1723 196 7.0061 8.0756 213 7.0017 8.0665 215 6.9985 8.0516 218 6.9963 8.0808 210 6.9973 8.1090 205 6.9943 8.0867 210 6.9991 8.1134 205 6.9950 8.0594 218 7.0035 8.0742 213 6.9991 8.0700 215 7.0013 8.1677 196 7.0009 8.1484 200 7.0050 8.0940 208 6.9971 8.0475 220 7.0019 8.0619 215 6.9942 8.1409 200 6.9965 8.1630 196 6.9934 Вопрос - как построить нужную таблицу, учитывая, что номиналы резисторов ограничены доступными номиналами в ряду (E192)? Напрашивается простейшее решение - найти апроксимирующую функцию и по ней считать. Так и сделал: Она дает уже лучший результат, но проблема в том, что она не учитывает третий столбец - результат "попадания". То есть по идее точность можно было бы еще повысить, только я не очень понимаю как. Подскажите, как это делается - как увеличить точность, зная результат "попадания"? Должна быть какая-то методология обработки результатов измерения? ПС таких проектов много, с другими видами зависимостей, поэтому интересует именно методологический подход. Грубо говоря задачу можно поменять следующим образом: Настройка проходит в два этапа - собственно сама настройка и выходной контроль: - на первом этапе настройщик просто делает шаги 1 и 2 - т.е. измеряет напряжение и запаивает нужный резистор. Все. - Шаг 3 делается на втором этапе контроля, т.е. мы просто контролируем выходное напряжение и негодные изделия на данном этапе просто отбраковываются. Тогда вопрос будет проще - как увеличить процент годных изделий - то есть повысить вероятность того, что после настройки выходное напряжение попадет в доверительный интервал 6.990-7.010В и изделие пройдет настройку с первого раза?