ДЕЙЛ
-
Постов
767 -
Зарегистрирован
-
Посещение
-
Победитель дней
5
Весь контент ДЕЙЛ
-
Ключ на полевом транзисторе
ДЕЙЛ ответил set bit тема в Схемотехника
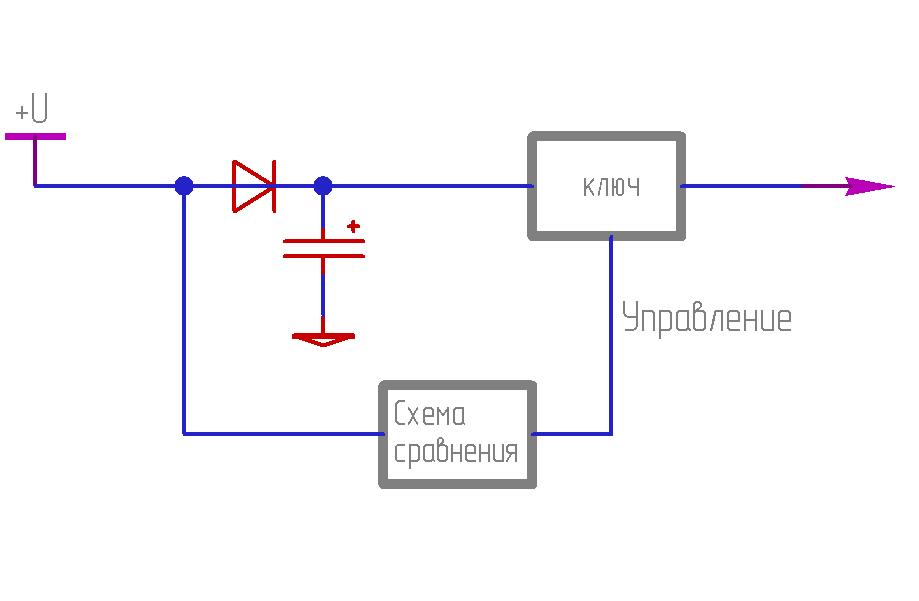
Так понимаю, что схему нужна для того, чтобы подавать питание в нагрузку после того, как питающее напряжение превысит какой-то заданный порог, который и отслеживает компаратор. Если все элементы на одной плате и питаются от одного источника напряжения, включая компаратор, то может иметь место переходной процесс в схеме компаратора в тот момент, когда подаётся напряжение питания. Попробуй плавно и медленно поднимать напряжение на входе платы, может что-то и прояснится. Если компаратор и ключ питаются от одного источника, то я разделил бы питание на две ветви: 1. Цепь питания схемы сравнения. 2. Цепь питания ключа. Получилось бы, что схема управления вошла бы в режим раньше, чем появится напряжение на ключе. Можно и дальше усовершенствовать схему, добавив диод после конденсатора и тогда можно добиться того, что на конденсаторе время нарастания напряжения до 0.6 вольт окажется болше времени нарастания напряжения компаратора до рабочего значения. А так да, нужно видеть схему полностью. Если есть возможность изменить схему, то управляющую часть проще сделать на МК в корпусе DIP8, если у него есть АЦП. В программе организовать алгоритм, который включает нагрузку через несколько секунд после превышения порога - это будет гарантией от ложных срабатываний.
-
Настройка прерываний в LPC1778
ДЕЙЛ ответил ДЕЙЛ тема в Программирование
Прогнал в отладчике через JTAG пошагово. Запустил, отправил байт и сделал Break. Программа зависла в указанном на рисунке месте и никуда не сдвигается. В чём тут может быть причина? В обработчик программа не входит, т.к. переменная pin не изменилась. Каким образом мой байт 0xAA всегда попадает в регистр U0DLL? Это же не приёмный буфер, а делитель. mempfis_, можно увидеть Ваш код программы, к которой относится показанный обработчик?
-
помогите разобраться в схеме
ДЕЙЛ ответил heineken тема в Схемотехника
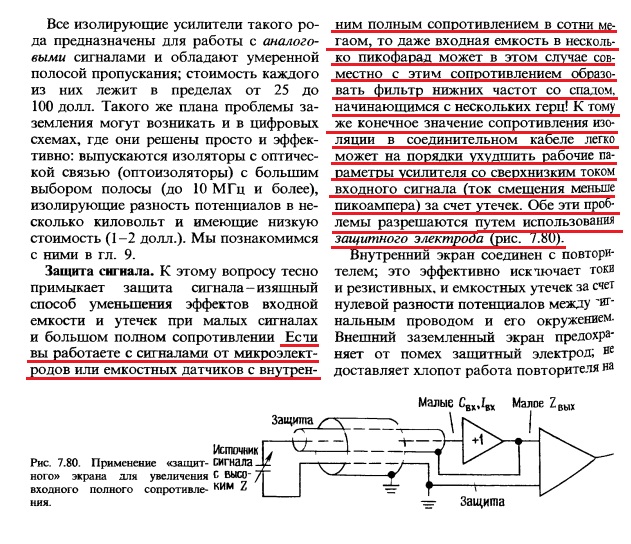
Дело видимо не столько в наводках, сколько в токах утечки. На высоких частотах конденсаторы шунтируют полезный сигнал, при низких частотах потенциал экрана будет равен среднему потенциалу между входами при любых внешних условиях. Ток утечки определяется разностью потенциалов, которая в данном случае не выше определённого предела порядка максимальной амплитуды полезного сигнала. На практике встречался с такой проблемой - был усилитель с гигаомным входным сопротивлением и сигнал размахом несколько микровольт. Никакие витые пары не помогали - утечки и выходной сигнал жили своей жизнью. Помогла схема из Хоровица и Хилла. Здесь что-то похожее. Хотя и самоподавление синфазных помех тоже происходит, соглашусь. Только в этом случае разумнее было бы применить инструментальный усилитель вроде AD820 или AD620.
-
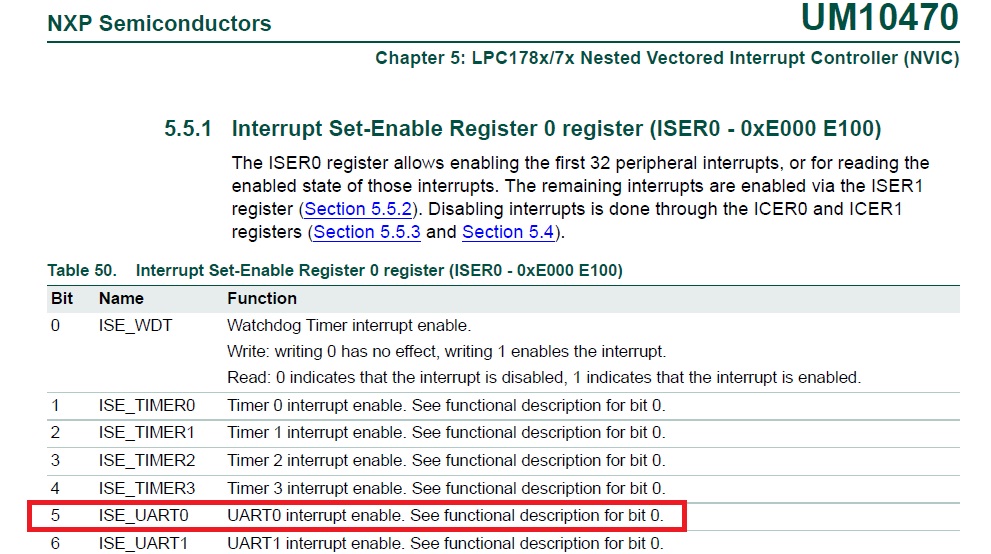
Настройка прерываний в LPC1778
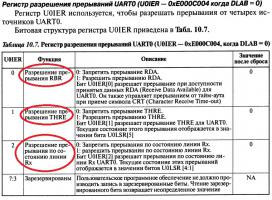
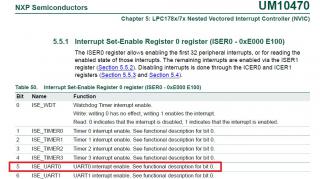
ДЕЙЛ ответил ДЕЙЛ тема в Программирование
как тогда указать компилятору, что эта функция выполняется по прерыванию? в startup откопал вот эту функцию: UART0_IRQHandler Только в модуле UART0 несколько источников прерываний, скрин описаний в прикреплённом файле. Как программе указать, что прерывание нужно именно после приёма байта? по этому вопросу откопал в даташите: