amaora
-
Постов
815 -
Зарегистрирован
-
Посещение
-
Победитель дней
4
Весь контент amaora
-
Сделать еще одно программное прерывание в котором уже вызывать FromISR функции это правильное и быстрое решение. Если RTOS находится в критической секции в момент выполнения приоритетного прерывания, то программное прерывание поставится в очередь до выхода из критической секции.
-
Непонятное управление вентилятором
amaora опубликовал тема в В помощь начинающему
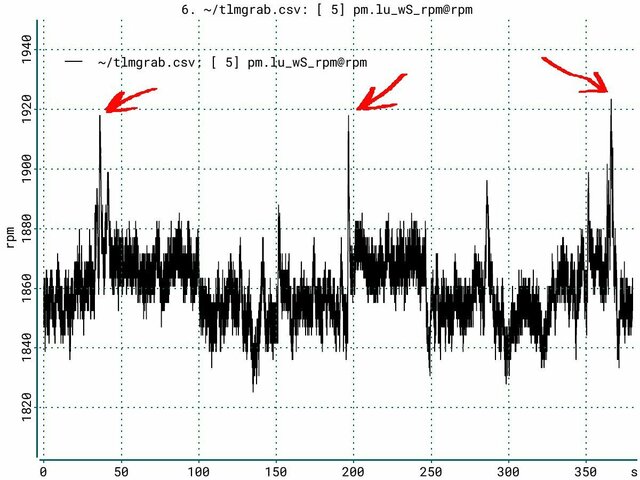
Делал себе вентилятор на окно с управлением по bluetooth, и возникла идея управлять скоростью двигателя без кнопок и каких либо интерфейсов. Например, для маломощного вентилятора можно сделать дискретное переключение между несколькими скоростями по некоторому событию. А событием может быть например кратковременное превышение момента нагрузки некоторого заданного (или адаптивного) порога. То есть прижали вентилятор руками на 0.5с и он переключился на одну скорость ниже. Но это даже для маломощного двигателя (~3 Вт) может оказаться не безопасно, поэтому я продолжаю искать идею получше, откуда взять событие для переключения. Пробовал резкое открывание/закрывание двери в комнату, это создаёт перепады давления и влияет на момент нагрузки вентилятора. На картинке эксперимент с постоянным током двигателя, на графике скорость, стрелками обозначены места где было движение двери. Отношение полезного сигнала к шуму не очень велико. Какие могут быть ещё варианты "непонятного" управления? - Отслеживать напряжение питания. Но давать по питанию какие-то всплески не очень удобно. Снова будут кнопки, а в таком случае их проще подключить как обычно, отдельными линиями, не то; - Измерять акустическое воздействие. Если мотор может пищать обмотками, то наверно может и "слышать" звуковые сигналы. Но здесь трудно ждать SNR отличный от нуля, а если анализировать спектр и долго накапливать, то и пищать надо будет долго, то есть нужна будет какая-то "пищалка"-пульт управления, тоже не то; - После остановки (по какому-то событию, или после подачи питания не стартовать даже?) можно использовать винт вентилятора как интерфейс взаимодействия, относительный угол поворота доступен к измерению; Но без дополнительных кнопок такой интерфейс выглядит неудобным; В качестве контроллера сейчас holybro-mini со своей прошивкой. Могу измерять или оценивать: - Напряжение питания; - Фазные напряжения; - Фазные токи; - Температуру платы контроллера; - DC сопротивление и AC импеданс обмоток двигателя; - Скорость двигателя; - Момент нагрузки двигателя; - Момент инерции (двигатель+винт); - Электрический угол положения двигателя (можно пересчитать в механический относительный).