amaora
-
Постов
815 -
Зарегистрирован
-
Посещение
-
Победитель дней
4
Весь контент amaora
-
Автоматическое наполнение бака водой
amaora ответил zheka тема в В помощь начинающему
Один датчик и доливать в определенное время, например после сеанса полива. -
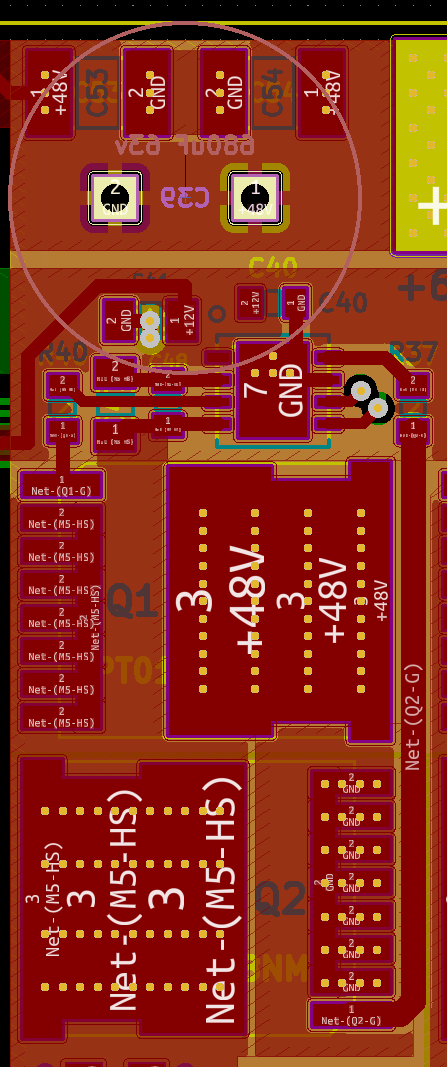
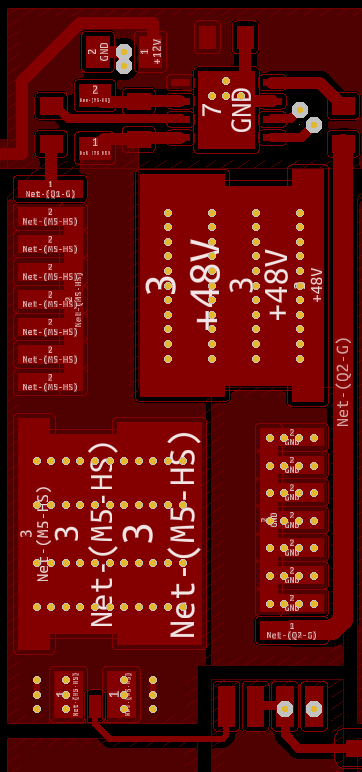
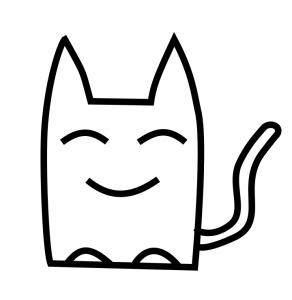
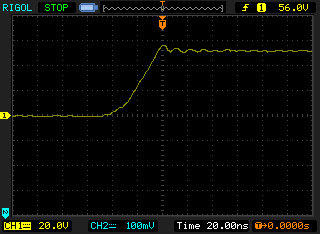
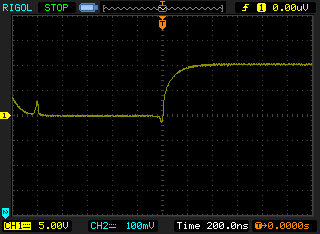
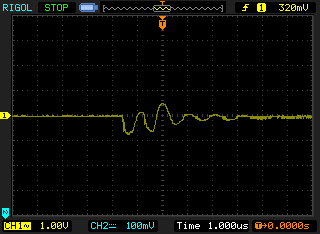
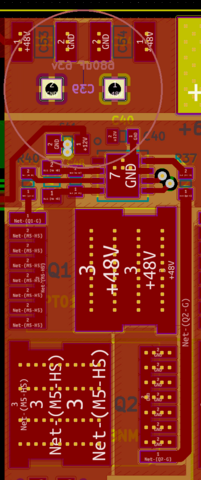
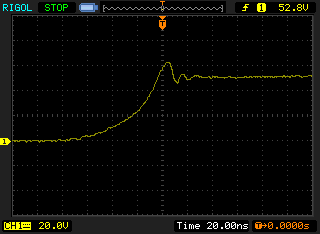
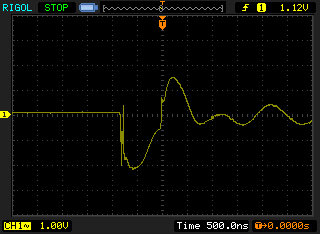
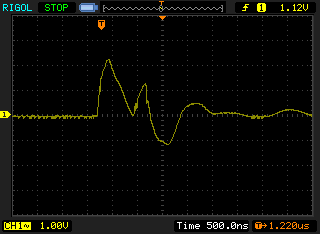
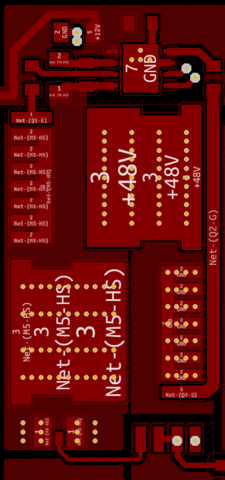
Ладно, перемерил на имеющейся плате формы напряжений, пока только на слабой нагрузке, и один канал в разных точках (а не два синхронно например), не хватает рук все держать. Измерял щупом с пружинкой. Исток-сток нижнего транзистора (Q2), максимум около 56в, питание ~50в. (Второй график, на большой нагрузке, выходит за 60в) Исток-затвор нижнего транзистора (Q2). Исток нижнего (Q2) - сток верхнего (Q1), AC. (Второй график, на большой нагрузке) На керамическом конденсаторе (C54), AC. (Второй график, на большой нагрузке) Ещё раз фрагмент платы, с конденсаторами. Когда будет по два транзистора параллельно, то фрагмент платы станет длиннее на эти два транзистора и немного шире. Полагаю это приведёт к ухудшению паразитных параметров, поэтому и хотелось заложить возможности для замедления. Может быть два затвора и без особых мер будут перезаряжаться достаточно медленно, но все таки сейчас переключение излишне быстрое как мне кажется.
-
Защита усилителей от КЗ
amaora ответил amaora тема в Схемотехника
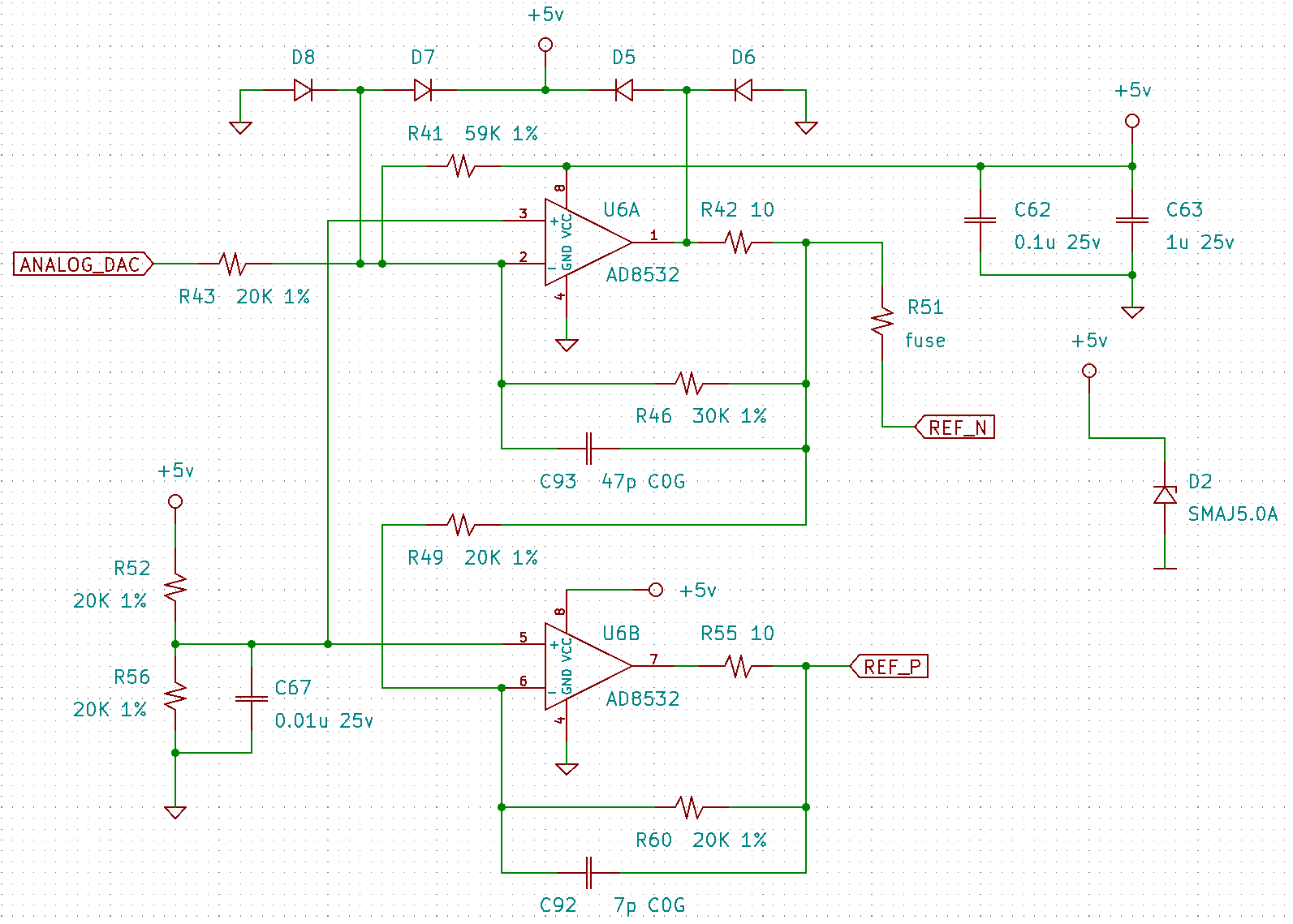
Потому что ОУ такие, а других данных от автора не поступало. Нужно около 100 мА в работе. Не больше 1м или даже 0.5м, нагрузка и датчики в одном конце, контроллер в другом. Всем спасибо, но переусложнять тоже не хочется, пока вот это обдумаю. На второй ОУ не смотрите, поленился ему диоды и плавкий резистор дорисовать. Не к реализации, а только на анализ схема.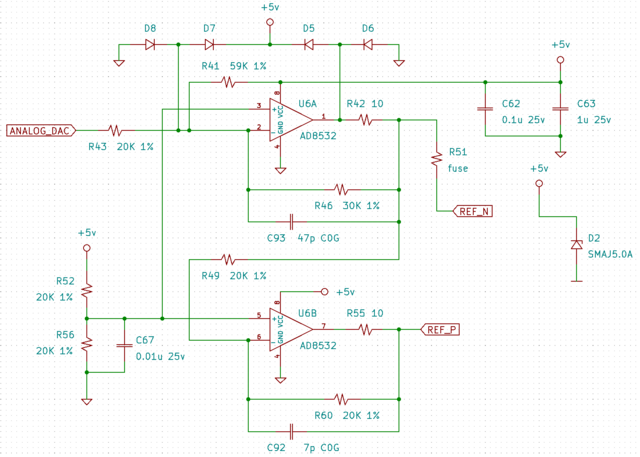
-
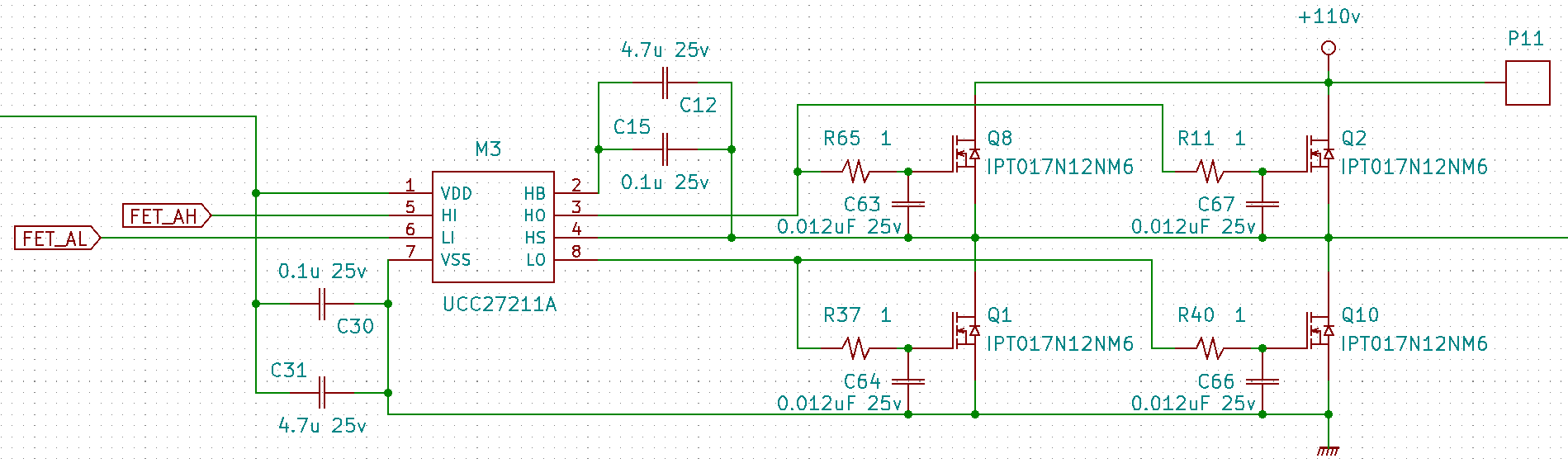
Да, указал верхний для упрощения описания. Все таки предлагаю разделять два случая: 1) Нарушение управления транзистором в следствии отклонения напряжения на затворе через ёмкостные связи на сток или исток. Может проявляться на одном транзисторе при его переключении, либо при переключении противоположного, важно dU/dt. Здесь запас в отрицательную сторону и возможности драйвера по току решают проблему. 2) Перенапряжение сток-исток из-за колебательного процесса перезаряда ёмкостей сквозным током. Демпфирование этого процесса будет связано с замедлением переключения каким либо путём. Как-то "отключить" эти ёмкости транзисторов нельзя, шунтирование внешним диодом не поможет. Внутренни диод все равно будет открываться и закрываться вместе с транзистором. Иногда могут образоваться условия для мягкого перезаряда Qrr, в зависимости от знака и величины тока нагрузки во время когда оба транзистора закрыты, в общем случае этого обеспечить нельзя. Мне нужно замедление для второго случая.
-
Защита усилителей от КЗ
amaora опубликовал тема в Схемотехника
Интерфейс между ЦАП/АЦП и ресолвером. Рассматриваю варианты защиты линий от КЗ между собой и на потенциал ~100в, точнее там ШИМ от -10в до 110в, нарастание ~300нс. По входам наверно достаточно будет добавить НЧ фильтрацию. А по выходам REF_P/REF_N не знаю как. 1) Ограничители напряжения и плавкие предохранители, нужен ремонт после срабатывания, плохо; 2) ??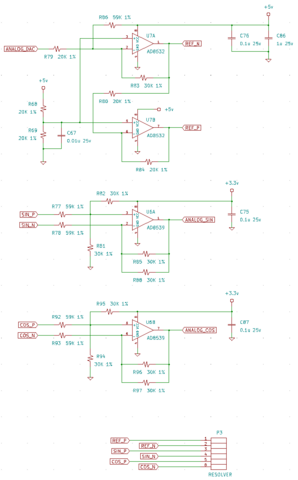
-
Замедление переключения MOSFET
amaora опубликовал тема в Силовая Преобразовательная Техника
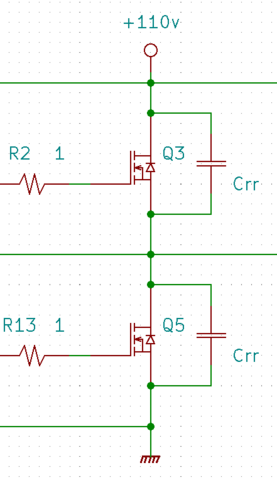
Увидел в одном дешёвом BLDC контроллере использование конденсатора, включённого между затвором и истоком, для замедления переключения силовых транзисторов. В литературе по теме управления MOSFET/IGBT такое встречается редко. Из своего опыта, мне это кажется интересным способом управления временем переключения, хочу попробовать. Недостатки очевидны, но все же непонятно, почему редко так делают. 1) Просто реализовать, один дополнительный компонент; 2) Не увеличивает выходной импеданс драйвера, то есть не мешает ему держать напряжение на затвор-исток при высоких du/dt на затвор-сток; 3) Нагружает драйвер бесполезной ёмкостью, увеличиваются потери; Для большей определённости, фрагмент предполагаемой схемы и имеющейся трассировки в которой была необходимость замедлить переключение (пришлось уменьшить питание с 12в до ~10.5в).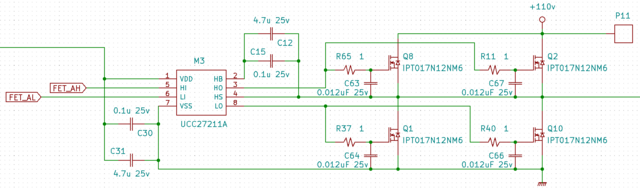
-
Есть и достаточно простые нейросети, которые даже обучать можно на мк. Нелинейный вариант FIR можно натренировать извлекать полезный сигнал, запоминать форму искажений для компенсации, наблюдатель состояния. Можно и IIR, но я пока не понял как их обучать. Делаю все на своей коленке, без python нейро-фреймворков. Нужно много данных, то есть либо готовых примеров вход-выход, либо если есть только входы то нужны еще и критерии качества выходов и еще больше данных и времени обучения. Это для задач, где обычное решение, синтезированное человеком не представляется возможным, неизвестна модель системы, слишком сложно и т.д.