Digi
-
Постов
248 -
Зарегистрирован
-
Посещение
Весь контент Digi
-
С обратным знаком вроде выглядит как надо. Но IO DELAY всёравно надо ставить руками, иначе он угоняет его в максимум. На работоспособность не проверял. SDC такой create_clock -name {ADC1_CLK} -period $adc_data_period [get_ports {ADC1_CLK}] -waveform { 0.625 1.875 } create_clock -name {ADC1_FRM} -period $adc_frame_preiod [get_ports {ADC1_FRM}] set input_clock <clock_name>; # Name of input clock set input_clock_period 2.500; # Period of input clock (full-period) set dv_bre 0.300; # Data valid before the rising clock edge set dv_are 0.300; # Data valid after the rising clock edge set dv_bfe 0.300; # Data valid before the falling clock edge set dv_afe 0.300; # Data valid after the falling clock edge # Input Delay Constraint set_input_delay -clock ADC1_CLK -max -[expr $input_clock_period/2 - $dv_bfe] [get_ports {ADC1_D[*]}]; set_input_delay -clock ADC1_CLK -min -$dv_are [get_ports {ADC1_D[*]}]; set_input_delay -clock ADC1_CLK -max -[expr $input_clock_period/2 - $dv_bre] [get_ports {ADC1_D[*]}] -clock_fall -add_delay; set_input_delay -clock ADC1_CLK -min -$dv_afe [get_ports {ADC1_D[*]}] -clock_fall -add_delay;
-
Прошу помощи с констрейнами DDR/QDR
Digi опубликовал тема в Работаем с ПЛИС, области применения, выбор
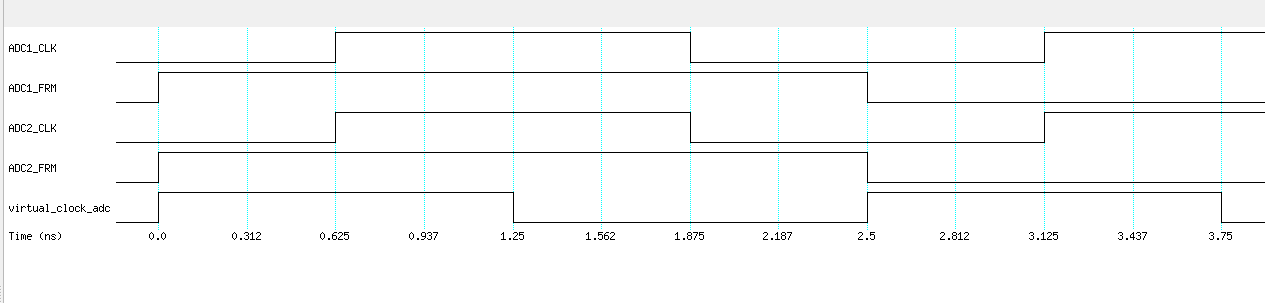
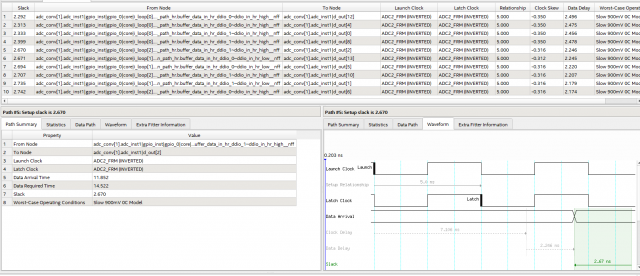
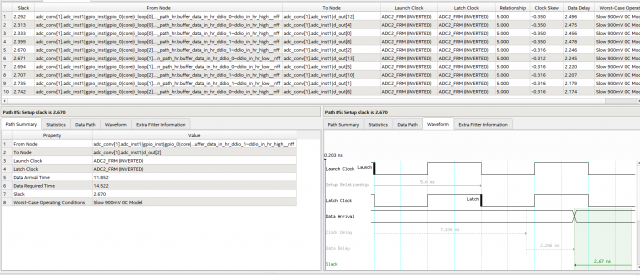
Бьюсь с выравниванием времянок в QDR интерфейсе, пока безуспешно. Прошу помощи. Сделал проект в котором реализован приёмник двух каналов АЦП по QDR интерфейсу. И выходы с приемников АЦП поключены к SignalTap, который тактируется ADC1_FRM. АЦП формирует удвоенную ADC_CLK, её фронты приходятся на середину данных. (Т.е ADC_CLK сдвинута относительно данных на 90 град) Тактовая частота ADC_FRM приходится на фронт данных. Констрейны прописал по описанию из AN433. После компиляции вижу в TimeQuest следующую картину: Клоки Почему то только анализирует ADCx_FRM. Почему нет ADCx_CLK ? Setup ADC2_FRM И самое, то из-за чего не работает и пытаюсь разобраться с констрейнами - это то что для данных и клоков получаются разные времянки прохождения сигнала до триггера. report_path -from ADC*_CLK -npaths 128 -panel_name {Report Path} ADC1_CLK - 4.4 нс, а ADC2_CLK - 8.6 нс и соответственно тоже самое и для данных ADC1_D* - 1.5 нс, ADC2_D* - 1.5 нс Ниже привожу код приемника QDR и SDC файл. В принципе я могу эти задержки выровнять при помощи настройки DelayChain но при изменениях в проекте базовые времена ADC*_CLK изменяются, и приходится настраивать заново. Помогите правильно прописать констрейны, чтобы при перекомпиляции не слетали времянки. // ПРИЕМНИК ДАННЫХ С АЦП module ADS42LB69 ( reset, // (in) reset clk, // (out) data clk d_out, // (out) data output // --------------chip interface ---------------------// D_CLK, // (in) QDR data clk FRAME, // (in) QDR data frame D // (in) QDR data ); input reset; input D_CLK; // ADCx_CLK input FRAME; // ADCx_FRM input [3: 0] D; // ADCx_D[] output clk; output reg [15: 0] d_out; wire [15: 0] gpio_d; gpiox4_in gpio_inst ( .aclr (sys_rst), .ck_fr (D_CLK), .ck_hr (FRAME), .pad_in (D), .dout ({gpio_d[3: 0], gpio_d[7: 4], gpio_d[11: 8], gpio_d[15: 12]}) ); assign clk = FRAME; always @(negedge FRAME) d_out[15:0] = gpio_d[15:0]; endmodule set_time_format -unit ns -decimal_places 3 derive_clock_uncertainty set adc_data_period 2.500 set adc_frame_preiod [expr $adc_data_period * 2] # max_delay = unit_interval - tsu # min_delay = th #set_input_delay -max [expr <unit interval> - <setup time>] -clock [get_clocks input_clock] -add_delay [get_ports data_in] #set_input_delay -min <hold time> -clock [get_clocks input_clock] -add_delay [get_ports data_in] #set adc_tsu 0.31 #set adc_th 0.29 // Так же пробовал ставить max 0.2 min -0.2 Эффекта не заметил set max_data_delay 1.05 set min_data_delay 0.2 create_clock -name virtual_clock_adc -period $adc_data_period create_clock -name {ADC1_CLK} -period $adc_data_period [get_ports {ADC1_CLK}] -waveform { 0.625 1.875 } create_clock -name {ADC2_CLK} -period $adc_data_period [get_ports {ADC2_CLK}] -waveform { 0.625 1.875 } create_clock -name {ADC1_FRM} -period $adc_frame_preiod [get_ports {ADC1_FRM}] create_clock -name {ADC2_FRM} -period $adc_frame_preiod [get_ports {ADC2_FRM}] set_input_delay -clock [ get_clocks virtual_clock_adc] -min $min_data_delay [get_ports {ADC1_D[*]}] set_input_delay -clock [ get_clocks virtual_clock_adc] -max $max_data_delay [get_ports {ADC1_D[*]}] set_input_delay -clock [ get_clocks virtual_clock_adc] -min $min_data_delay [get_ports {ADC1_D[*]}] -add_delay -clock_fall set_input_delay -clock [ get_clocks virtual_clock_adc] -max $max_data_delay [get_ports {ADC1_D[*]}] -add_delay -clock_fall set_input_delay -clock [ get_clocks virtual_clock_adc] -min $min_data_delay [get_ports {ADC2_D[*]}] set_input_delay -clock [ get_clocks virtual_clock_adc] -max $max_data_delay [get_ports {ADC2_D[*]}] set_input_delay -clock [ get_clocks virtual_clock_adc] -min $min_data_delay [get_ports {ADC2_D[*]}] -add_delay -clock_fall set_input_delay -clock [ get_clocks virtual_clock_adc] -max $max_data_delay [get_ports {ADC2_D[*]}] -add_delay -clock_fall set_false_path -setup -fall_from [get_clocks virtual_clock_adc] -rise_to [get_clocks ADC1_CLK] set_false_path -setup -rise_from [get_clocks virtual_clock_adc] -fall_to [get_clocks ADC1_CLK] set_false_path -hold -rise_from [get_clocks virtual_clock_adc] -rise_to [get_clocks ADC1_CLK] set_false_path -hold -fall_from [get_clocks virtual_clock_adc] -fall_to [get_clocks ADC1_CLK] set_false_path -setup -fall_from [get_clocks virtual_clock_adc] -rise_to [get_clocks ADC2_CLK] set_false_path -setup -rise_from [get_clocks virtual_clock_adc] -fall_to [get_clocks ADC2_CLK] set_false_path -hold -rise_from [get_clocks virtual_clock_adc] -rise_to [get_clocks ADC2_CLK] set_false_path -hold -fall_from [get_clocks virtual_clock_adc] -fall_to [get_clocks ADC2_CLK] set_clock_groups -exclusive -group [get_clocks {ADC1_CLK } ] set_clock_groups -exclusive -group [get_clocks {ADC2_CLK } ] set_clock_groups -exclusive -group [get_clocks {ADC1_FRM } ] set_clock_groups -exclusive -group [get_clocks {ADC2_FRM } ]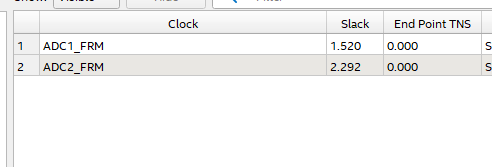

-
Анализер спектра FSL6
Digi ответил microstrip_shf тема в RF & Microwave Design
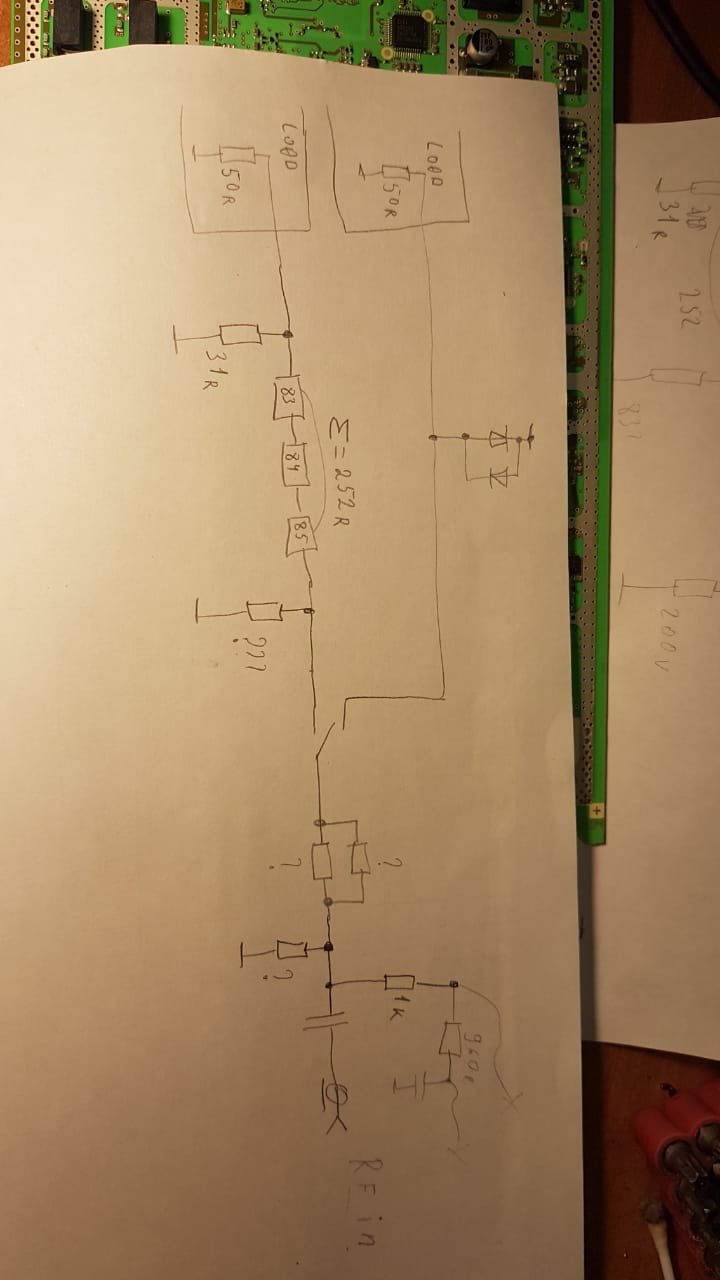
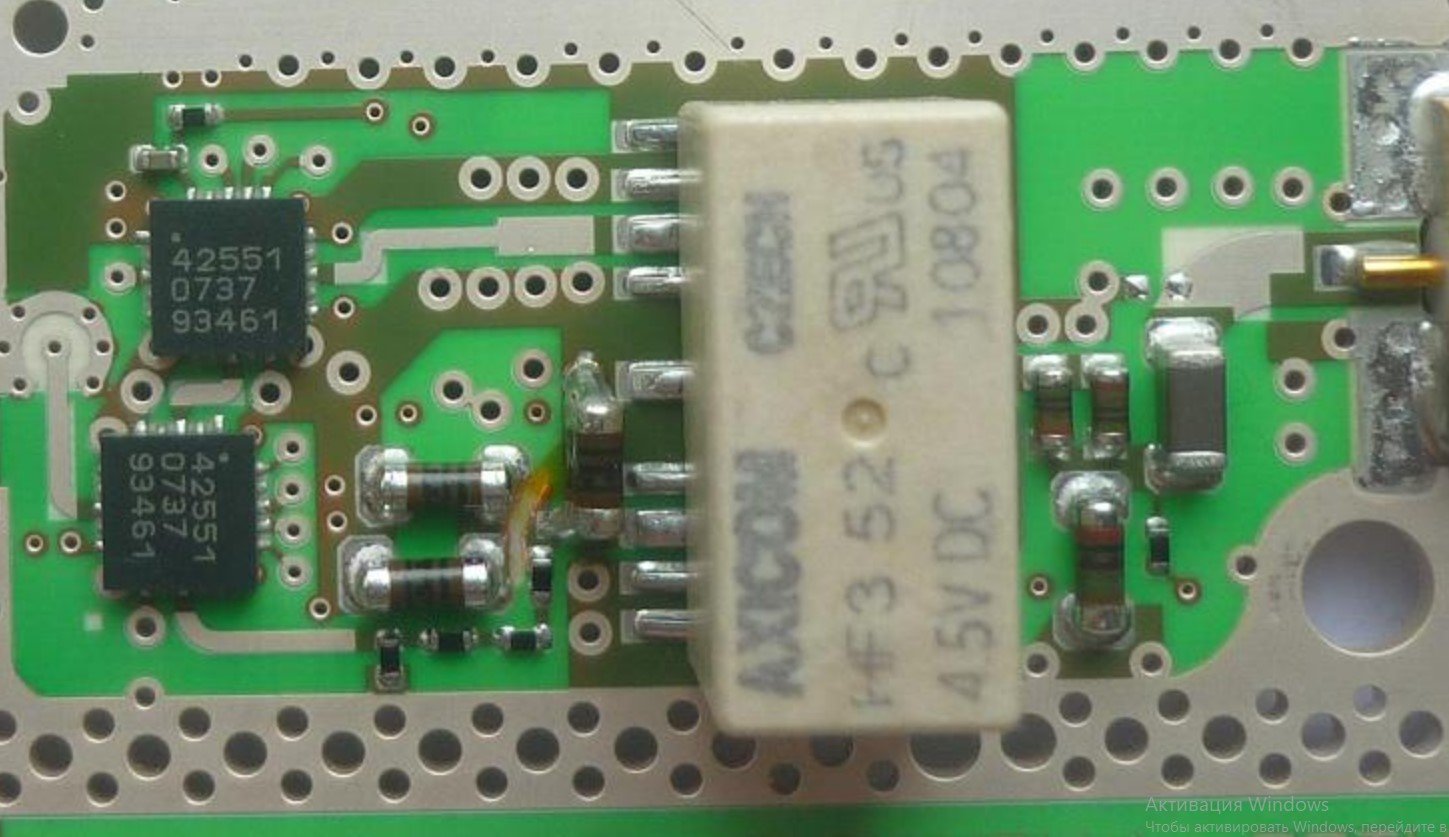
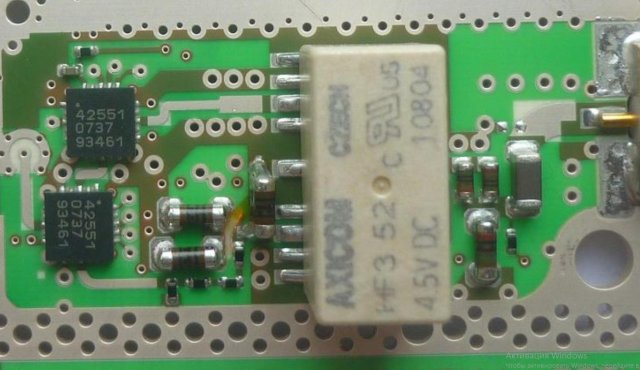
Пытаюсь реанимировать данного мишку FSL-6. Выгорел аттенюатор. Восстановил схему. Как узнать, какие номиналы резисторов там были ? (На схеме обозначены знаком вопроса) На фото, из этой темы два параллельных резистора слева никуда не подключены. Они по 100 Ом каждый. По остальной маркировке не могу разобрать. Оставшиеся обгоревшие резисторы имеют следующие остаточные значения: Слева от реле 83 Ом, и скорее всего ему параллельно был припаян резистор на 100 Ом параллельные справа от реле вверху: 39 Ом и 43 Ом, справа внизу - в обрыве... (Измерял сняв с платы)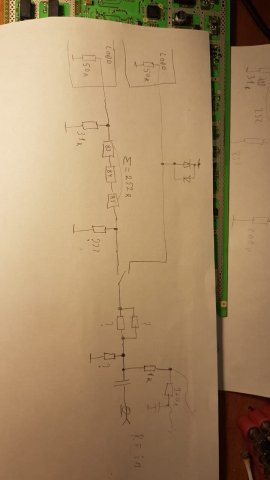
-
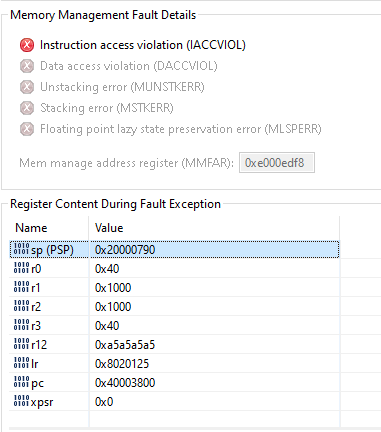
Попадает он в исключение вот так. Как он там оказывается, не пойму, где смотреть...
-
ADC QDR и Timequest
Digi ответил Digi тема в Среды разработки - обсуждаем САПРы
Проект потихоньку разрастается и работа с АЦП начинает напрягать. При небольших изменения проекта начинает разваливаться по времянкам входная часть. Решил снова заняться правильным описанием констрейнов. Отключил все входные задержки. Описал констрейны так: set adc_data_period 2.500 set adc_frame_preiod [expr $adc_data_period * 2] set data_delay 1.5 create_clock -name {ADC1_CLK} -period $adc_data_period [get_ports {ADC1_CLK}] -waveform { 0.625 1.875 } create_clock -name {ADC1_FRM} -period $adc_frame_preiod [get_ports {ADC1_FRM}] set_clock_groups -exclusive -group [get_clocks {ADC1_CLK } ] set_clock_groups -exclusive -group [get_clocks {ADC1_FRM } ] set_input_delay -clock ADC1_CLK $data_delay [get_ports {ADC1_D[*]}] set_input_delay -add_delay -clock_fall -clock ADC1_CLK $data_delay [get_ports {ADC1_D[*]}] Но Quartus почему то сообщает о слаках на ADC1_CLK и тем не менее сам ставит задержку в буфере ADC1_D[*] на 33. прописываю set_data_delay -2.5 вижу следующую картину: задержку в буфере Quartus выкрутил на максимум, слаки в пределах -1 Мне не понятна его логика работы. Если данные должны прийти раньше, то задержку нужно уменьшать, а он пытается её наоборот, увеличить. Или я что я не так описал и как исправить ситуацию ? Как ещё правильно описать сигнал половинной частоты ADC1_FRM ? Напомню, АЦП работает в режиме QDR Надеюсь я не единственный, кто использовал QDR режим совместно с АЦП, может есть примеры ?
-
Перетягиваю прогу на STM32F405, среда разработки TrueStudio. Мне необходимо в Sector 3 разместить пользовательские данные (типа EEPROM). Со стороны программы работа с ними осуществляется как областью памяти. Проблема возникла в том, что я не пойму как прописать в *.ld файле секцию .isr_vector по адресу 0x800_0000 а остальные - начиная с адреса 0x801_0000. Подскажите, как это прописать ?

-
ADC QDR и Timequest
Digi ответил Digi тема в Среды разработки - обсуждаем САПРы
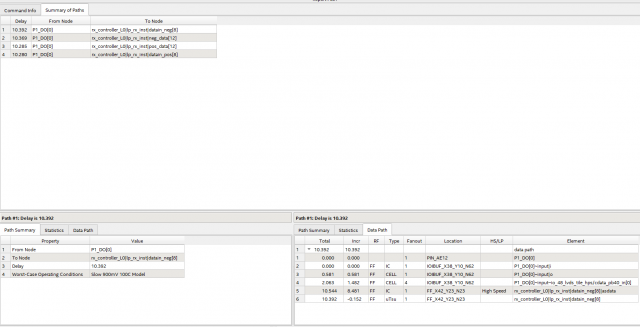
Продолжаю причёсывать проект и разбираться с TimeQuest. Чтобы не плодить темы, продолжу здесь. Сейчас описываю входной порт DDR Link порта. Кусок кода входного блока выглядит так: reg [11:0] datain_pos; reg [11:0] datain_neg; always @(posedge P1_CLKO or negedge rst_n) if (~rst_n) datain_pos <= 12'b0; else datain_pos <= {P1_DO, datain_pos[11:4]}; always @(negedge P1_CLKO or negedge rst_n) if (~rst_n) datain_neg <= 12'b0; else datain_neg <= {P1_DO, datain_neg[11:4]}; Входной clock описал так: create_clock -name {P1_CLKO} -period 5.0 -waveform { 0.000 2.5 } [ get_ports P1_CLKO] Задержка P1_CLKO 7.2ns report_path -from P1_CLKO -npaths 32 -panel_name {Report Path} Report Path: Found 32 paths. Longest delay is 7.211 -from [get_keepers {P1_CLKO}] -panel_name "Report Path" Задержка P1_DO[0] 3.8 ns report_path -from P1_DO[0] -npaths 32 -panel_name {Report Path} Теперь если в *.sdc прописать , то задержка P1_DO[*] становится примерно 10.4 ns # CLKO - 7.18 DO - 10.44 set_input_delay -max -clock [get_clocks {P1_CLKO}] 0.65 [get_ports {P1_DO[*]}] set_input_delay -min -clock [get_clocks {P1_CLKO}] 0.55 [get_ports {P1_DO[*]}] set_input_delay -add_delay -max -clock_fall -clock [get_clocks {P1_CLKO}] 0.65 [get_ports {P1_DO[*]}] set_input_delay -add_delay -min -clock_fall -clock [get_clocks {P1_CLKO}] 0.55 [get_ports {P1_DO[*]}] Если прописать , то задержка P1_DO[*] становится примерно 7,4 ns. Всё начинает работать как положено, но вылезают слаки по P1_CLKO на -2,3 нс # CLKO - 7.18 DO - 7.4 Warning CLKO set_input_delay -max -clock [get_clocks {P1_CLKO}] 2.65 [get_ports {P1_DO[*]}] set_input_delay -min -clock [get_clocks {P1_CLKO}] 2.55 [get_ports {P1_DO[*]}] set_input_delay -add_delay -max -clock_fall -clock [get_clocks {P1_CLKO}] 2.65 [get_ports {P1_DO[*]}] set_input_delay -add_delay -min -clock_fall -clock [get_clocks {P1_CLKO}] 2.55 [get_ports {P1_DO[*]}] Как для моего случая правильно прописать констрейны ? И почему возникает большая задержка в 10 нс при уменьшении параметра ?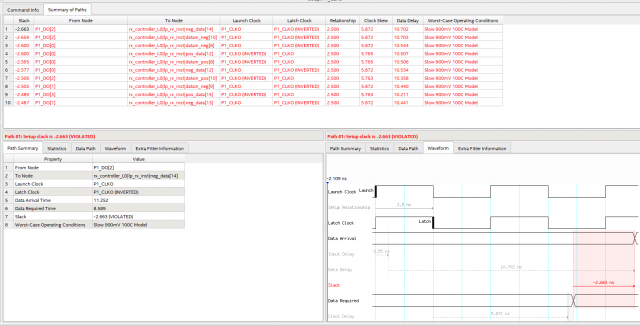
-
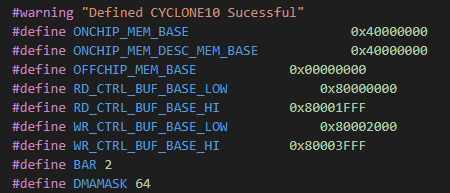
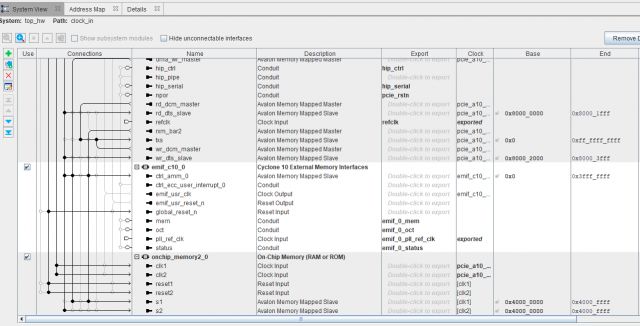
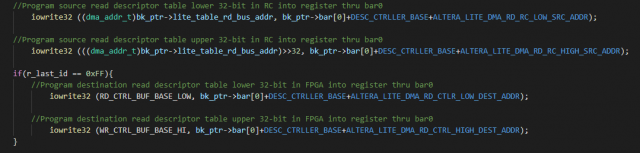
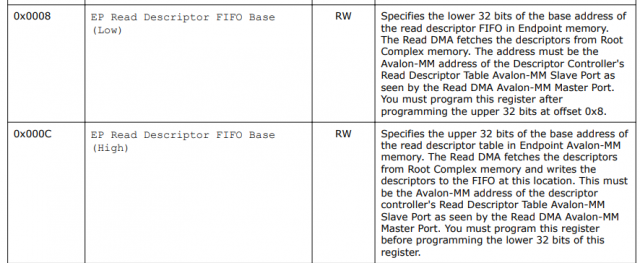
Продолжаю ковырять DMA. Возникли непонятки с описанием регистров Имею в наличии AN829 (который кстати, если его прошить, не запустился не даёт загрузиться Linux загрузчику. Причём Windows стартует нормально.), и несколько описаний Нашел на интеловском форуме пример описания адресов, которое по смыслу вроде правильное. Система В исходниках AN829 написано совершенно не так как советуют на форуме, (да ещё и с опечаткой в исходниках вместо RD_CTRL_BUF_BASE_HI написали WR_CTRL_BUF_BASE_HI ) Но суть не в этом, а в том что адреса в QSys прописаны как 0x8000_0000 для RD и 0x8000_2000 для WR, а в define драйвера прописаны значения, которые указывают на верхний и нижний граничный адрес. В описании от Intel тоже я не сильно понял, написано что сначала нужно прописать адрес по смещению 0x000c, то есть после записи самого себя. И а регистр 0x0008 после того как он же будет прописан. Ну ещё как вариант я сильно туплю и не дружу с английским. Причём в примере AN829 пишется сначала LOW, затем HIGH. . Сам я пробовал делать по разному, но DMA обмен не стартует. Флаги завершения передачи не выставляются. Первый раз читался как 0xff , после - то что записал. Программировал только один канал, на запись из host в avalon. Соответственно для DMA контроллера использовал регистры RD. К контроллеру и шине подключена однопортовая on-chip память одновременно к BAR2, к dma_wr_master и dma_rd_master. Так собственно вопрос к прошедшим это, какие должны быть адреса ? И кто первым должен записаться ?
-
ADC QDR и Timequest
Digi ответил Digi тема в Среды разработки - обсуждаем САПРы
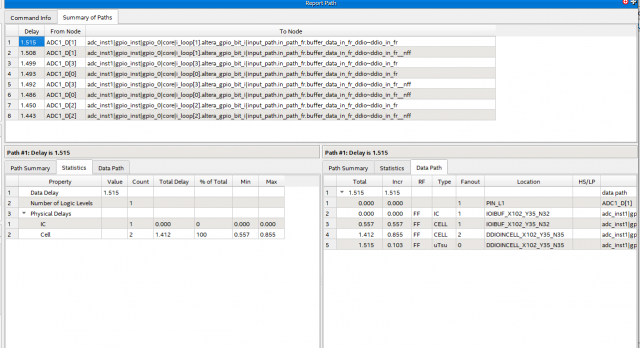
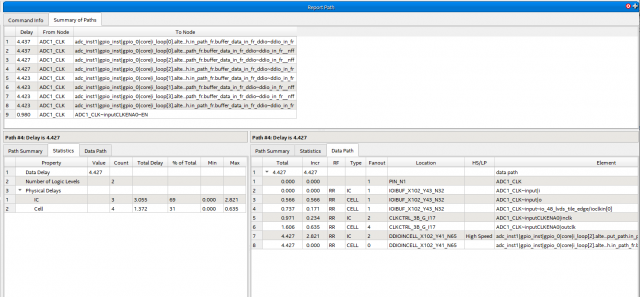
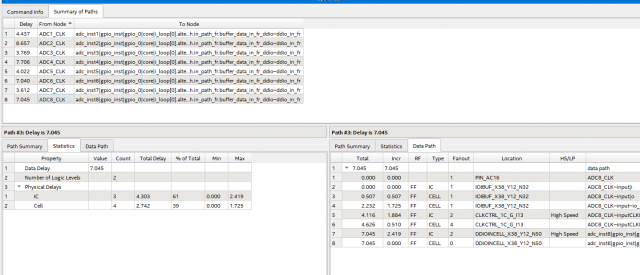
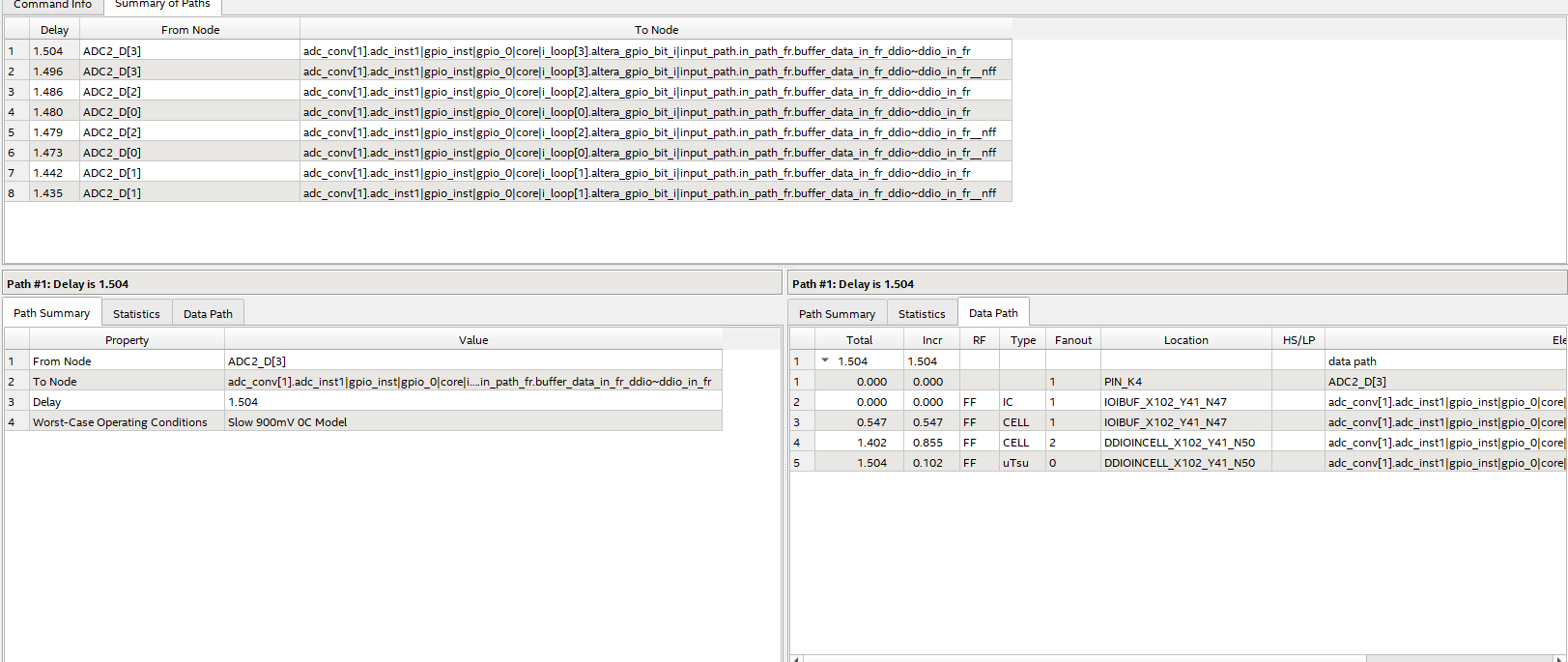
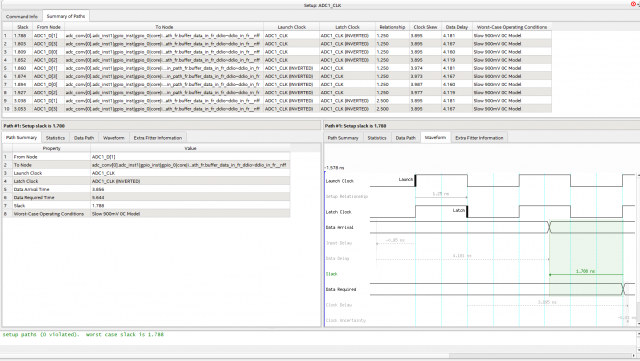
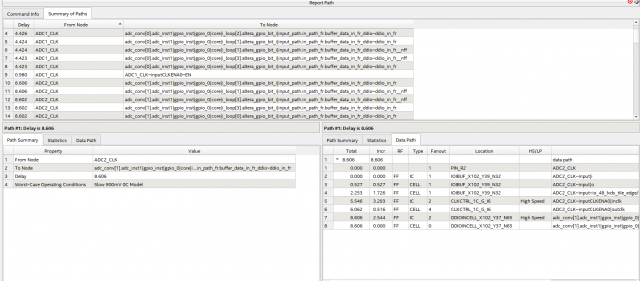
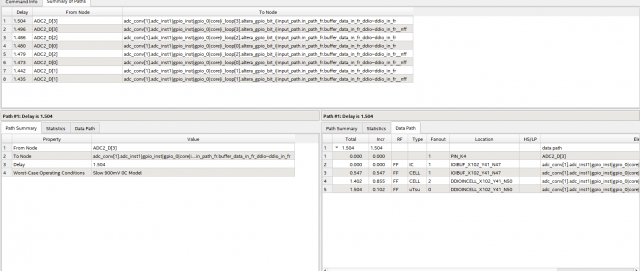
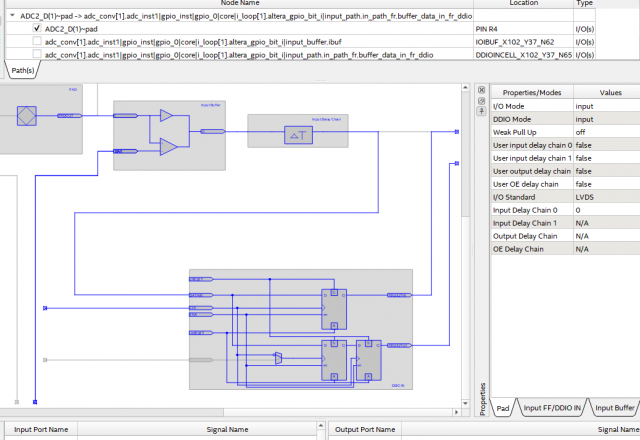
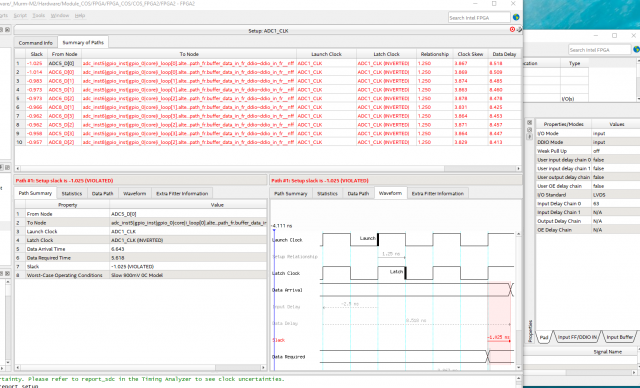
Если я всё правильно понял, то Report Path показывает путь сигнала от вывода м/с до регистра. В данном случае я смотрю путь от вывода данных до первого регистра, работающего на CLK (400 МГц). Задержка составила 1,515 нс. На всех каналах порядок примерно такой же. CLK приходят на выделенные ноги и данные на выводы DQ/DQS. На второй картинке я смотрю Report Path от CLK. Но не пойму, почему он составляет 4.4 нс. Я правильно понимаю, что путь сигнала ADC1_CLK от вывода до входа регистра ddio.clk составляет 4.4 нс ? На последнем скрине показаны задержки сигнала от ADC*_CLK до одного из входных регистров. Так как время получается разное, то это и объясняет, почему эта конструкция не работает как ожидалось. Посмотрел путь сигнала FRAME - он у для всех равен и составляет около 7.5 нс. Это опять же при условии, что я смотрю именно то что нужно и правильно интерпретировал результаты. PS: А так это и есть Альтера. По поводу частотки должно быть всё нормально, так как часть каналов работает стабильно и на 250 МГц. Так же если для всех использовать только CLK и FRAME от первого канала, то ситуация значительно лучше.