Поиск
Показаны результаты для тегов 'stm32'.
-
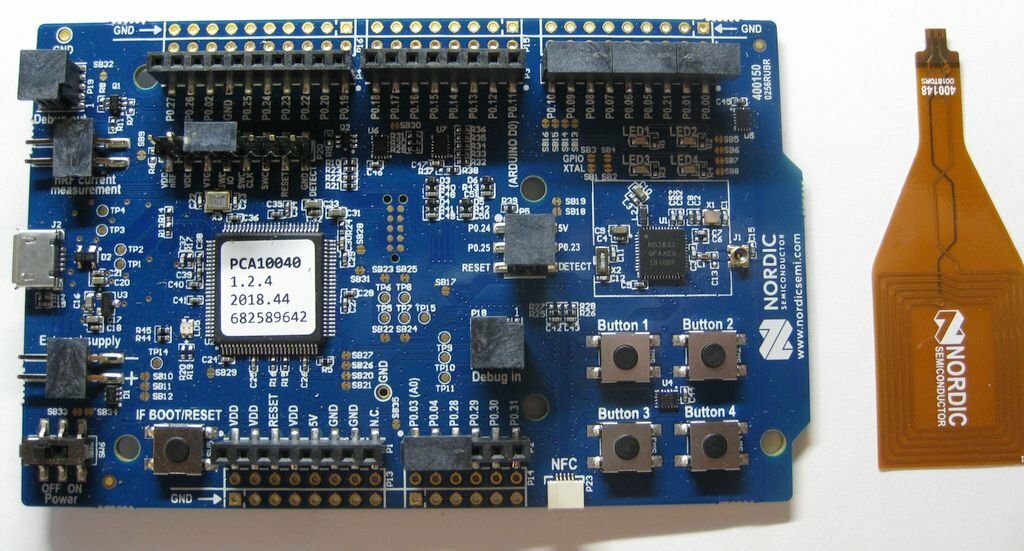
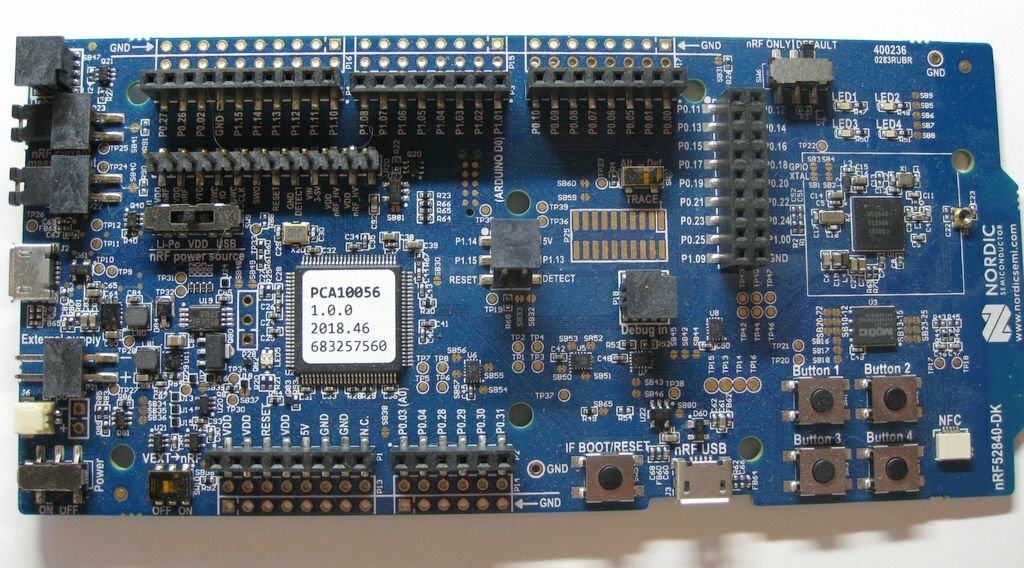
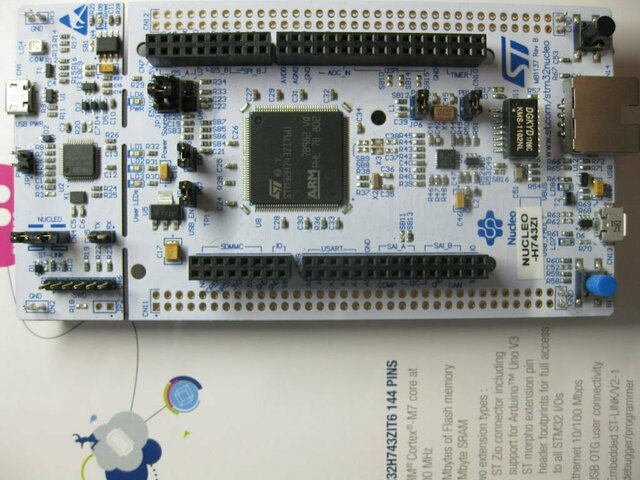
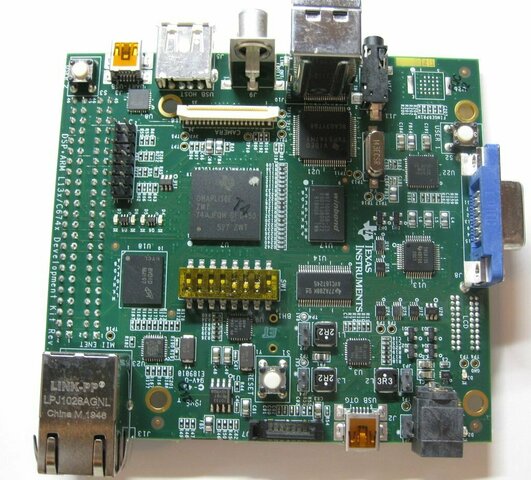
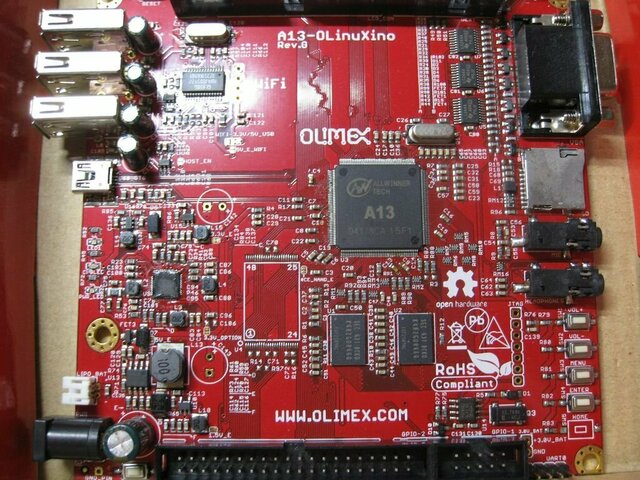
Продам отладочные платы разных производителей: 1. STM32F4 Discovery 2. STM32H743 Nucleo-144 3. OMAP-L138 Development Kit (LCDK) - полный комплект (плата, диск, кабеля, переходники) 4. Чипы OMAP-L138 (на 450 МГц) 5. Olinuxino A13 6. Модуль SOM A13 7. NRF PCA10040 8. NRF PCA10056 + штатная гибкая антенна 9. uBlox ATSAM3U2C + штатная печатная антенна + USB-кабель Фото ниже. Цена договорная. Рассылка по РФ. За подробностями пишите в личку или на почту repstosw2018 @ gmail . com






-
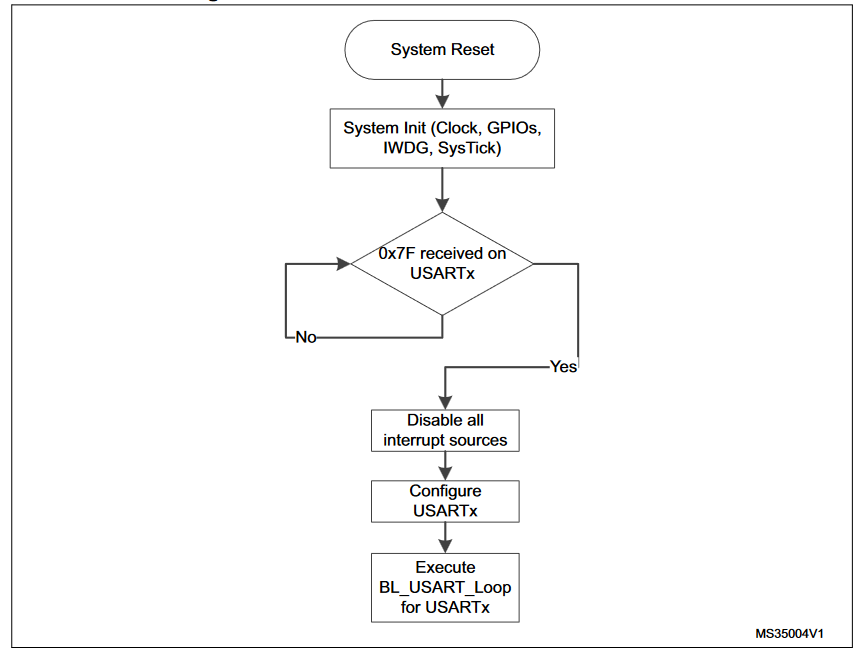
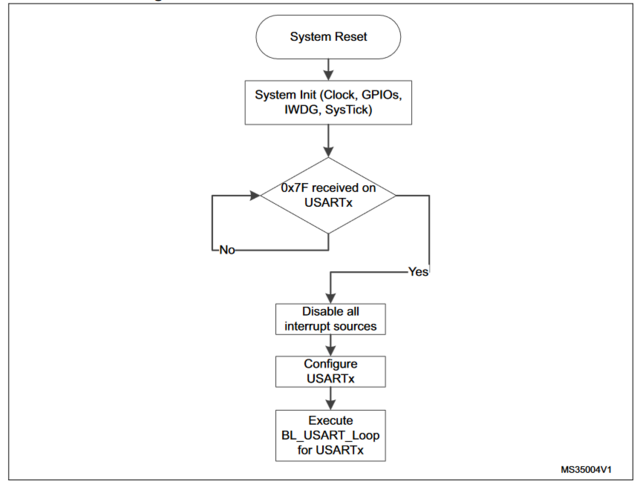
В даташите есть такая схема: Но всё равно не очень понятно, как именно это должно работать. То есть нужно загрузиться из system memory (Boot0 = 1, Boot1 = 0) и прислать на любой USART байт 0x7F и по этому USART'у можно послать прошивку через CubeProg?
-
Я делаю плату разработки на STM32 и хочу сделать отключаемый кварцевый резонатор на выводах OSC32, которые можно будет использовать для других целей, например, в качестве выводов GPIO. Я подключаю резонатор по схеме генератора Пирса, схему подключения смотрите на изображении: Источник изображения: https://www.st.com/resource/en/application_note/an2867-guidelines-for-oscillator-design-on-stm8afals-and-stm32-mcusmpus-stmicroelectronics.pdf Могу ли я поставить только один выключатель (джампер), чтобы полностью отключить генератор от контакта STM32 и сделать так, чтобы он абсолютно не влиял на контакты OSC32_IN/OUT и подключенную к ним периферию, даже если на этих контактах есть какой-либо сигнал, или мне нужно поставить переключатель на оба провода 1 и 2? Дополнение: Я не беспокоюсь о влиянии остальных компонентов на кристалл (исключая случаи, при которых они могут вывести кристалл из строя), а только кристалла на микроконтроллер и периферию, потому что если кристалл отключен от микроконтроллера, он не будет выполнять никаких других задач в этой схеме.

-
STM32F407VET6 не принимает данные от DP83848
U_K опубликовал тема в ARM, 32bit
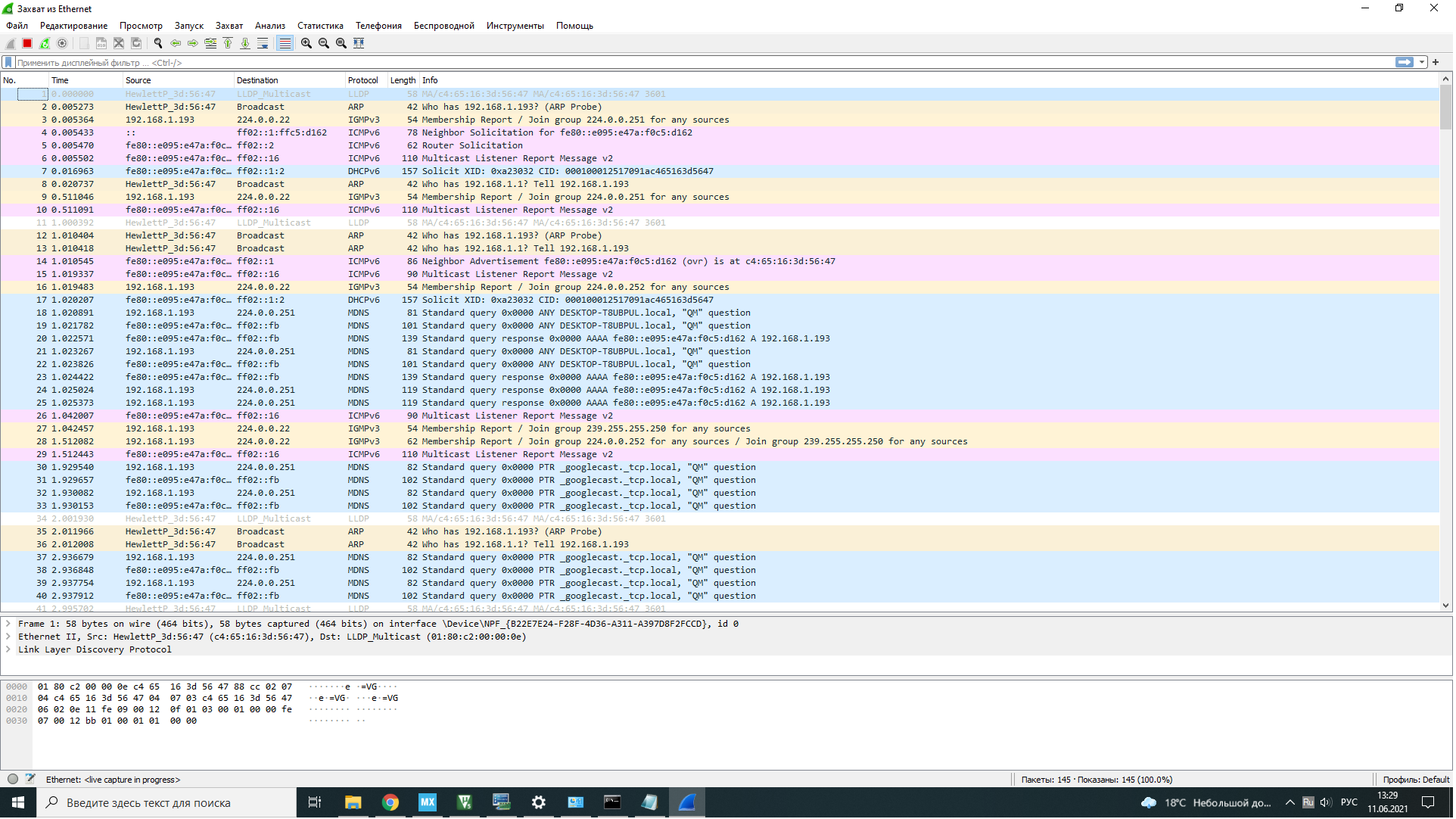
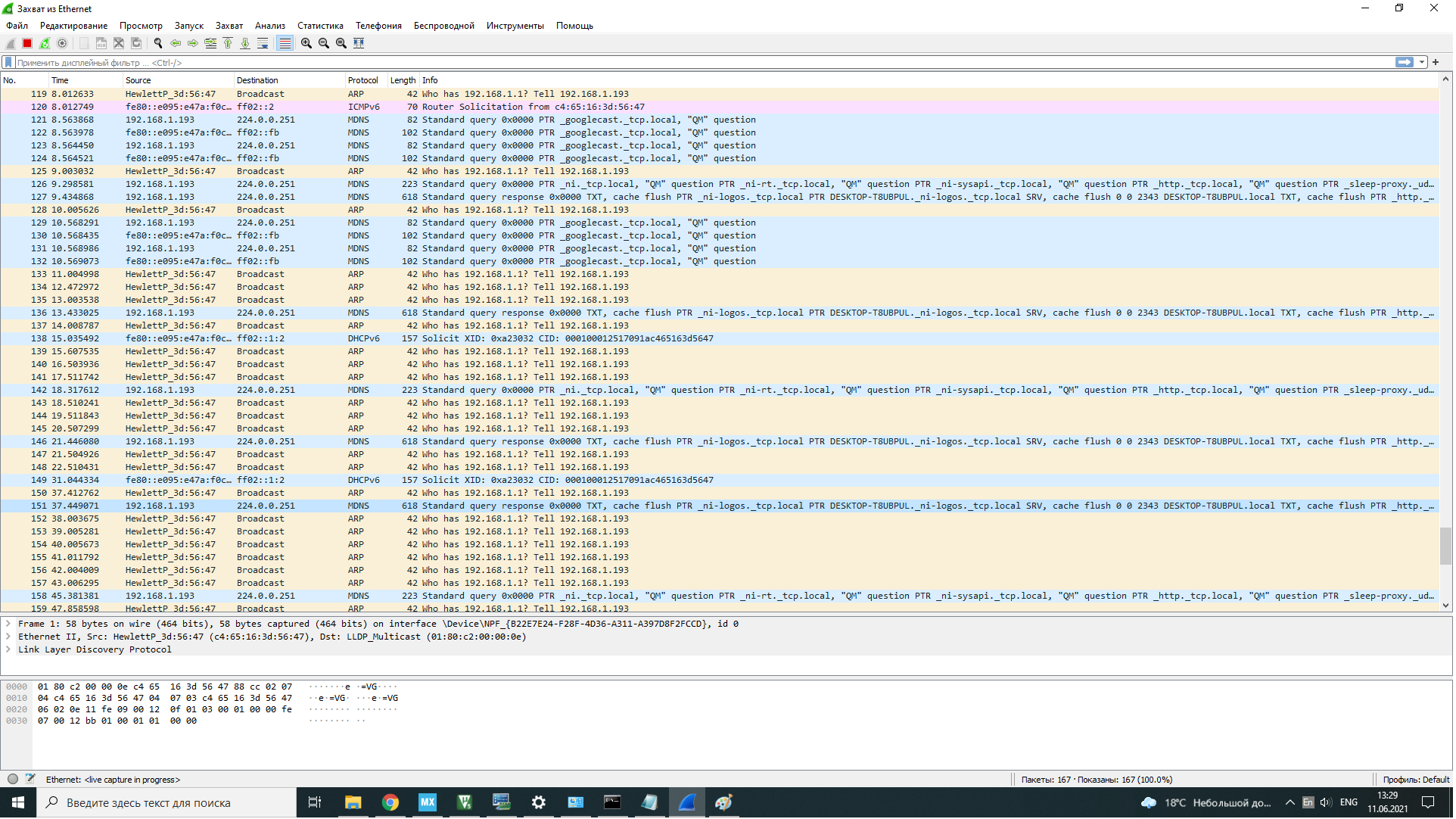
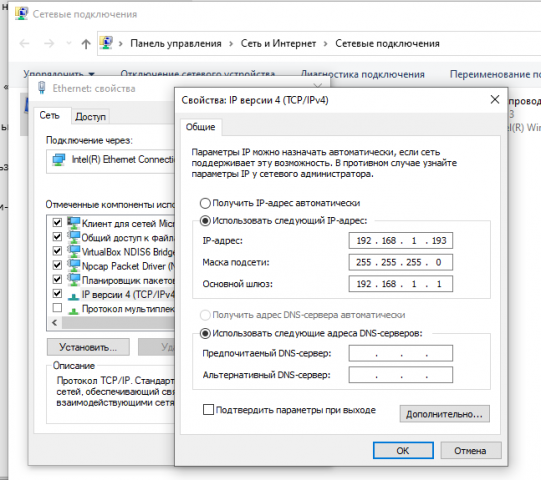
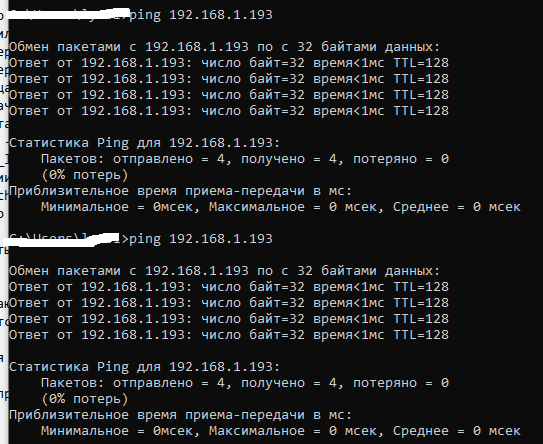
Здравствуйте! Имеется разработанная плата с STM32F407VET6 и PHY DP83848 для реализации Ethernet-передачи(планируется TCP-клиент или сервер). STM32F407VET6 и DP83848 соединяются по MII-интерфейсу. Используется LWIP-стек. DP83848 тактируется от отдельного кварца на 25 МГц, микроконтроллер - также от отдельного на 25 МГц. Плата и ПК соединены напрямую по Ethernet-кабелю, без роутеров и маршрутизаторов. Проект был сгенерирован из CubeMx в Keil v5.27. Далее в цикл While() добавил MX_LWIP_Process(), скомпилировал, прошил. Основная проблема - МК не принимает данные от DP83848. Что было проверено/сделано: 1. Сверил все адреса регистров/значений из даташита на DP83848 с тем, что выдает CubeMx. Пришлось в некоторых местах исправить. 2. Проверил повторно схему, соответствие подключаемых выводов на обоих сторонах (STM32 и DP83848), еще раз сверился с требованиями по подключению DP83848 из даташита. 3. Проверил осциллографом сигналы на RXD0..RXD3 - имеются (т.е. DP83848 принимает сигналы с ПК, и передает затем STM32, но он их не воспринимает что-ли?), RX_CLK и TX_CLK - имеются, генерация от кварца есть. 4. Назначил IP адрес, маску и узел в настройках адаптера Ethernet на ПК. 5. Попытался понять, где же все-таки происходит "затык", прошелся последовательно по функциям: While() -> MX_LWIP_Process() -> ethernetif_input(&gnetif) -> low_level_input(netif) -> HAL_ETH_GetReceivedFrame(&heth). В функции HAL_ETH_GetReceivedFrame(&heth) есть условие: if(((heth->RxDesc->Status & ETH_DMARXDESC_OWN) == (uint32_t)RESET)), в него программа не заходит. Подумал, что возможно что-то с DMA, но так и не получилось понять. 6. Хотел проверить в RMII-режиме - схема и разводка платы не позволяет (P.S.- Хотя конечно, можно настроить "нестандартно" тактирование STM32, пустить 50 МГц с MCO на RX_CLK и X1 у DP83848 через доп.провода) После вышеописанных действий результата нет. Скриншоты с настройкой из CubeMx прикрепил. Также прикрепил пару скриншотов из WireShark, скриншоты "фейкового" пинга из командной строки и общих настроек LWIP. В WireShark видно, что ПК постоянно спрашивает "Who has 192.168.1.1.?", а плата шлет какие-то запросы (наверно связаны с автосогласованием при включении DP83848), но не слышит ПК. Я понимаю, что применять CubeMX не очень "рационально", но имеется потребность в кратчайшие сроки реализовать связь по Ethernet для передачи данных. Буду рад любым подсказкам.




-
Поднимаю тему так как на рынке сейчас чехарда, а брэндовые stm32 по некоторым позициям подорожали в 6-10 раз. Пытался (и пытаюсь) пол года как уже объездить CH32F103C8T6 клон от китайской компании WCH Здесь буду описывать грабли, которые прошел лично с данными МК, дабы другие не налетали. В принципе, чипы рабочие, если как рыбу "фугу" уметь их готовить. Они дешевле оригинальных STM32 в несколько раз, имеют широкий диапазон питания по напряжению. Купить их можно только на Али либо в Китае. Даже на англоязычном сайте WCH они не упоминаются, только в китайской его части. Кто сталкивался или интересуется - прошу высказыватся.
-
Как защититься от непростых наводок?!
Black001010 опубликовал тема в ЭМС
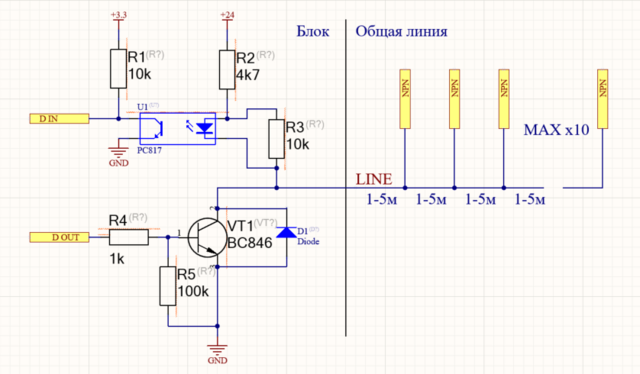
День добрый. Задача... Нужна общая линия тревоги, устойчивая к помехам. К ней подключаются 1-10 блоков, каждый на расстоянии 1-5м друг от друга, соотв. максимальная длина линии 50 м. Любой блок может активировать линию (логическое "или") и каждый блок узнает, если линию активировал другой блок. Все блоки питаются 24в с общего БП. В каждом блоке STM32F103. Решение... Линию просаживаю биполярным транзистором с ОК, оптопарой слушал линию. Проблема... На столе работает как нужно. Любой блок может активировать линию, и все об этом узнают. НО когда имитирую работу в тяжелых (нормальных рабочих) условиях, проводами линии обвешиваю 3-х фазный электродвигатель - начинается произвольная активация линии. Предположил открывается транзистор, пытался менять номинал R5 - не помогло, хотя на 2к перестал открываться от касания пальцем. Предположил срабатывает светодиод оптопары, пытался "приглушить" номиналом R3 до 2к - нет разницы. Подскажите пожалуйста, как доработать мою схему (или может другой схемой), решить задачу. В электронике слаб, буду очень признателен, если поправите неправильные номиналы, подскажите что поменять. P.S. Возможна зацепка... При подключении 2-х блоков, наводки как буд-то сильнее и наводятся быстрее, чем если подключены 8 блоков. При 2 блоках светодиоды (имитируют вход МК) горят на 20%, МК активацию линии (лог 0) ловит практически сразу при включении электродвигателя. При 8 блоках светодиоды помаргивают еле еле, МК активацию линии ловит секунд через 10.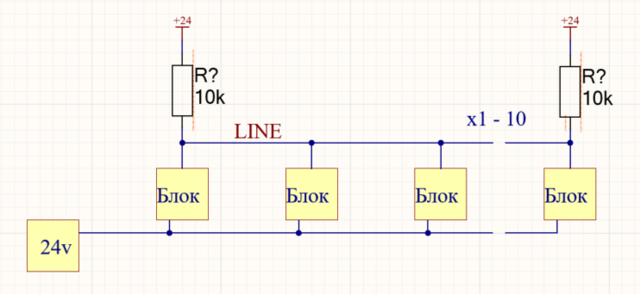

-
АЦП, ДМА и таймер
NefoRalt опубликовал тема в ARM, 32bit
Здравствуйте! Имеется отладочная плата с STM32F303. Задача: измерять импульсный сигнал длинной 100 мкс и частотой 1000 Гц и выводить измерения на ПК. Запускаю два таймера. Первый имитирует измеряемый сигнал. Второй "толкает" АЦП Измеряю через внутренний 12-битный АЦП с использованием ДМА и запуском по таймеру. и сохраняю измерения в массив. Затем этот массив через ДМА передаю ЮАРТУ и вывожу на ПК. На выходе получаю поток невнятных чисел. Помогите разобраться в чем ошибка.