А зачем мне отдавать энергию в сеть? Мотор и на выбеге снизит обороты, а при нагрузке, когда что-то обтачивается, так и замедление гораздо интенсивнее.
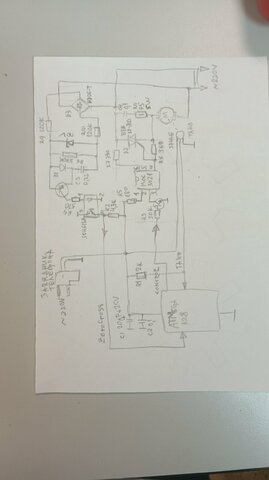
По задумке, когда происходит регулировка оборотов на понижение, то контроллер выключает симистор и мотор вращается по инерции с замедлением. В момент, когда обороты мотора уменьшаться до значения меньше установленного, симистор начинает открываться и подравнивать обороты до установленных.
При регулировке оборотов на повышение, симистор открывается на больший кусок полупериода и разгоняет мотор.