andey_sidorov
-
Постов
18 -
Зарегистрирован
-
Посещение
Весь контент andey_sidorov
-
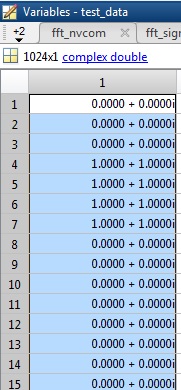
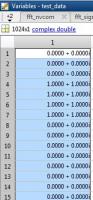
Тестирую функцию преобразования Фурье. Может кто мне разъяснит, а то что-то запутался. в матлабе пишу: test_data(1:1024) = complex(0,0); test_data(4:7) = 1 - 1i; в окне просмотра переменных вижу следующую картинку, где у мнимой части положительный знак. на С код примерно следующий: typdef complex { float real; float imag; } complex test_data[1024] = {0}; for (int i = 3; i < 7; ++i) { test_data.real = 1; test_data.imag = -1; } Одинаковый ли знак у мнимой части комплексных данных?
-
Посмотрел. Но я и до этого догадывался, что необходимо использовать сложные сигнала. Видимо я каких-то очевидных вещей не понимаю.
-
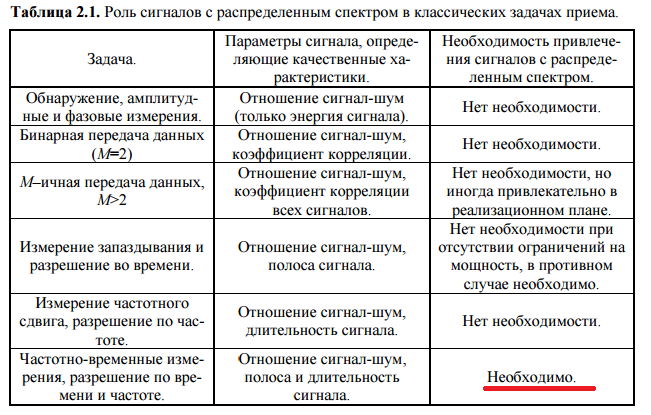
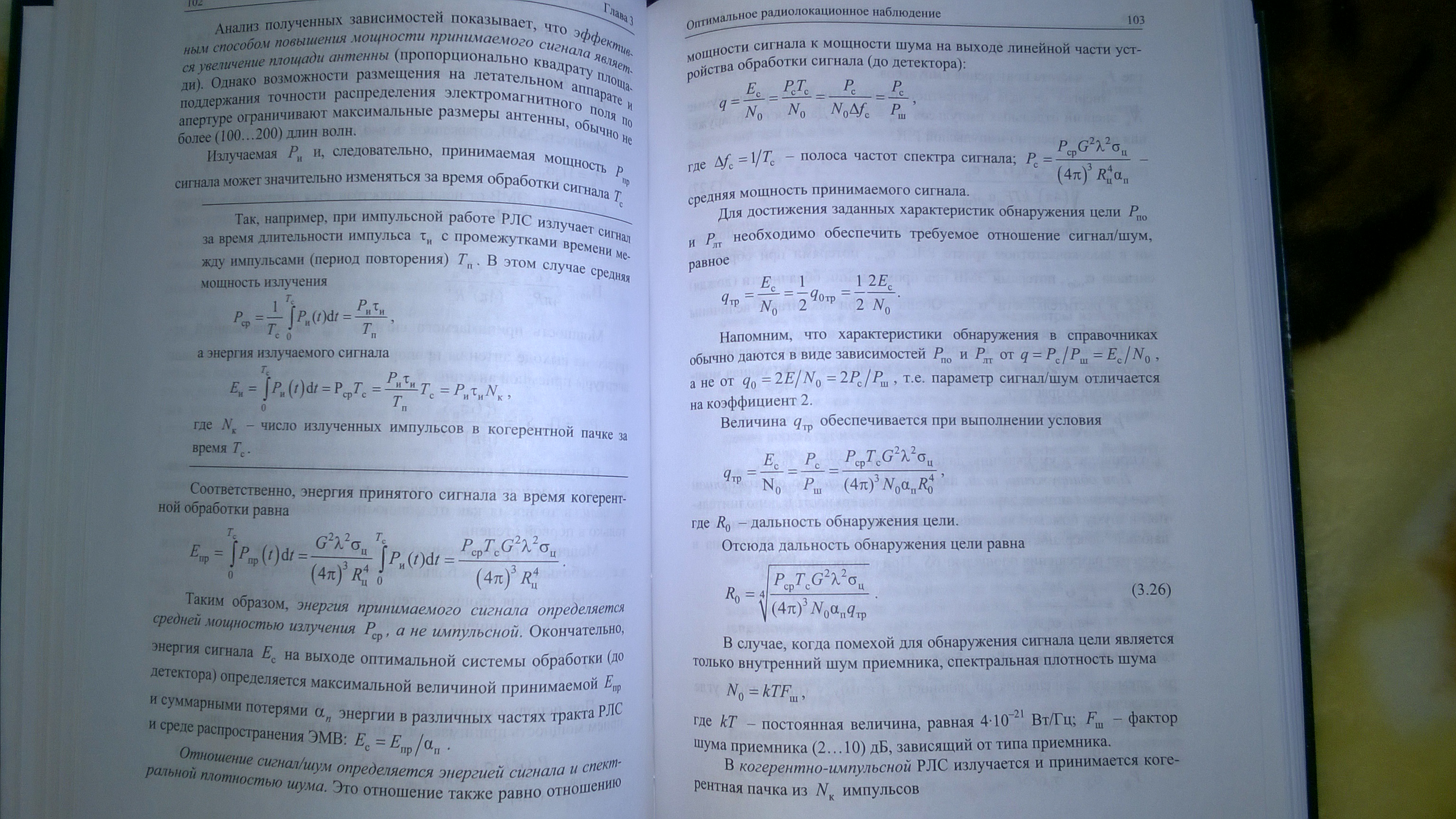
Это я понимаю. Но, при использовании сложных сигналов используется согласованная фильтрация, соответственно, зондирующий импульс сжимается. Во вложении прикрепил фото из книги Кондратенкова, Радиовидение. Там формула расчета дальности обнаружения приведена немного в другом виде. Минимальная чувствительность приемника разложена на составляющие. И в числителе, под корнем, находится средняя излучаемая мощность. Pср = Pимп*t_имп; В Бакулеве (и на википедии), через t_имп определяется полоса пропускания приемника dF = 1/t_имп. Утверждается, что это верно для импульсного сигнала, а для ЛЧМ сигнала полоса приемника будет определятся девиацией частоты ЛЧМ. И минимальная чувствительность приемника определяется как Prec_min = Nnoise*dF. При этом есть полоса приемника, физического устройства, которая шире, чем полоса как для импульсного сигнала, так и для ЛЧМ сигнала. Как все-таки правильно определить Prec_min, для импульсного сигнал и для ЛЧМ сигнала, и что делать с длительностью импульса зондирования?

-
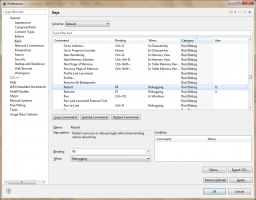
Eclipcse - IAR plugin
andey_sidorov ответил Nixon тема в IAR
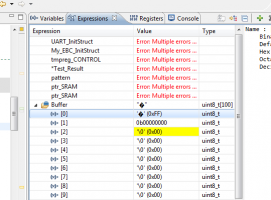
Можно настроить горячую клавишу для RESET. Может кто знает как настоить редиктирование переменных в шестнадцатеричном виде в окне Expressions?