athlon64
-
Постов
157 -
Зарегистрирован
-
Посещение
Весь контент athlon64
-
Излазил каталог Schroff и ещё нескольких производителей, не могу найти каркас который изображен на фото. В принципе сильно похож на euroPac PRO, но у europac высота бывает только 3 или 6 юнитов. Те модели, которые предлагаются в 2U, как правило не имеют рейку с отверстиями ближе к передней панели (нужно для крепления внутрь модулей). Также обычно на боковых стенках отсутствует направляющая для удобного монтажа/демонтажа в стойку.



-
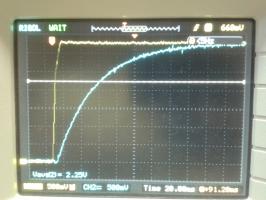
С векторами прерываний всё в порядке. В ходе экспериментов удалось выяснить следующее: - В случае когда процессор не стартует, генерация на кварце 25 МГц отсутствует. - При тактировании от HSI глюк повторяется аналогично тактованию от кварца. - Если при включении удерживать сброс при подаче питания и после этого отпустить сброс, то процессор стартует стабильно. Сброс после подачи питания приводит к нормальному старту процессора. - BOR включен, порог выставлен на 2,7В, при выставлении любых порогов или отключении BOR ситуация не меняется. Работу BOR проверили лабораторным БП - BOR срабатывает. Всё это при запитывании процессора от БП на той же плате (5В на LM2679 -> 3.3В на LM1085) - Под рукой есть плата Discovery с процессором STM32F407VG, при запитывании её от того же БП 3.3В (с платы устройства), процессор Discovery стартует стабильно. NRST у дискавери подключен аналогично. - Если запитывать процессор от лабораторного БП в обход БП на плате, то процессор стартует стабильно. Осциллограммы нарастания напряжения питания 3.3В (жёлтый) и уровня на ноге NRST (синий): От лабораторного БП: От нашего БП: Какие у кого соображения?