


shkal
-
Постов
279 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные shkal
-
-
Опубликовано · Изменено пользователем shkal · Пожаловаться
Имеем вычисление по простейшей формуле F=A*B/C.
A, B, C имеют тип long int, F - long double.
Строка F=(((long double)(А))*B )/С; при А=65535, В=2500000, С=5000002 даёт результат, совпадающий с виндовым калькулятором только до 9 знака.
Где я теряю точность?
Компилятор Микрочип С30, мк PIC24H.
-
Ну вот вы и не демонстрируйте :)
У меня еще в 1993 году была бумажная дока на МКЭ 332-333 и там цифры были примерно такие, как я и написал.
Видимо, ребята тоже забыли поставить черточки, а вашей "консультации" так и не получили. :)
Вопрос по чуйствительности закрыт.
Да не закрыт. Даташит покажите хоть один.
А чем красный не угодил? Падением напряжения на нём?Да, нужно полпитания
-
Опубликовано · Изменено пользователем shkal · Пожаловаться
Это у вас однобокая информация. Есть и 60 мВ/Па и 600 мВ/Па и 1200 мВ/Па.http://www.radiomaster.net/load/07-7/index.html
Автор не указал тип. Поэтому возникли замечания. Можно и добавить усиления, но Ку не более 20.
Не стоит так откровенно демонстрировать своё ламерство. В табличке, на которую вы ссылаетесь, люди забыли чёрточки между цифрами поставить :) :)
Andrey_1 , кстати, в измерительных микрофонах по $100 типа Behringer ECM8000 или Nady CM 100 как раз и стоят капсули panasonic WM-61 за $2
-
Выполняет ( если он синий/белый)
-
Электретные микрофоны имеют чувствительность примерно 1000 мВ/Па.
Это ошибка примерно в 20 раз. Обычно 50-60 мв/Па
Соответственно и уровень на выходе - единицы-десятки милливольт. Поэтому и повторитель после него никому не нужен, нужен усилитель.
-
Опубликовано · Изменено пользователем shkal · Пожаловаться
Так тоже нельзя ;)
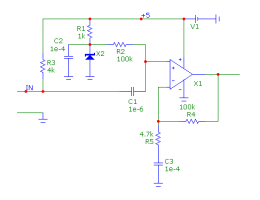
Вот так можно. Стабилитрон на 2.5 В
Вы хотя-бы первую главу про ОУ из "Искусства схемотехники" прочитайте, нельзя так, право же.
-
Опубликовано · Изменено пользователем shkal · Пожаловаться
1) первый ОУ так нельзя включать.
2) При закорачивании входа его Ку стремиться к бесконечности, что вы и наблюдаете.
3) TL072 - не подходит для микрофонного преда, поскольку довольно шумное. Из недорогих - возьмите RC4580
4) Питание от USB очень грязное.
5) 7805 от 5В входа работать не будет.
-
Добрый день всем. Существуют ли дсп с параллельными интерфейсами, позволяющими напрямую подключить ацп 14 бит 170-250 msps? Какова потоковая скорость передачи интерфейс-память для ддр? Прикидочно общая задача - оцифровка 4М отсчётов, запись в память, обработка не в реальном времени, выдача результатов на DVI
-
А если состояние порта В сохранить в переменной, а следующей командой присвоить ее порту Е - работает?
-
Если я правильно понял, у вас захват двух последовательных фронтов входного сигнала, т.е. измеряется время одного периода. В этом случае нужна информация о приблизительной входной частоте, иначе как определить нужный коэфициент деления? В алгоритме , описанном GM, изменение коэфициента деления происходит как-бы автоматически при изменении входной частоты таким образом, чтобы время измерения оставалось постоянным. Кроме того, этот алгоритм не имеет нижней граничной частоты - он просто ждет второго фронта, если он не появился за время гейта. Еще вот какой вопрос-очищается ли у ПИК24 ФИФО захвата при выключении модуля захвата?
-
Интервал счета формируется от фронтов входного сигнала
-
Уважаемый, читайте внимательно алгоритм по ссылке из первого поста, вы его нифига не поняли.
-
Отказался в итоге от захвата таймера, считающего входную частоту. Захватываю только таймер, считающий опору, а в прерывании от IC1 просто читаю входной таймер первой командой. При высокой входной частоте этот таймер, конечно, успевает сосчитать несколько фронтов за время входа в прерывание, но, поскольку это время однинаково в начале и конце цикла измерения, то ошибка не возникает. Ессно, при такой схеме требуется , что приоритет прерывания IC1 был наивысшим.
Там есть один тонкий момент, связаный с возможностью совпадения прерывания от IC1 и прерывания от переполнения таймеров, но это вроде решаемо, тут где-то была ветка на эту тему.
-
Сейчас оптимальное по цене\качеству - Quick 202D, Quick 301/303
-
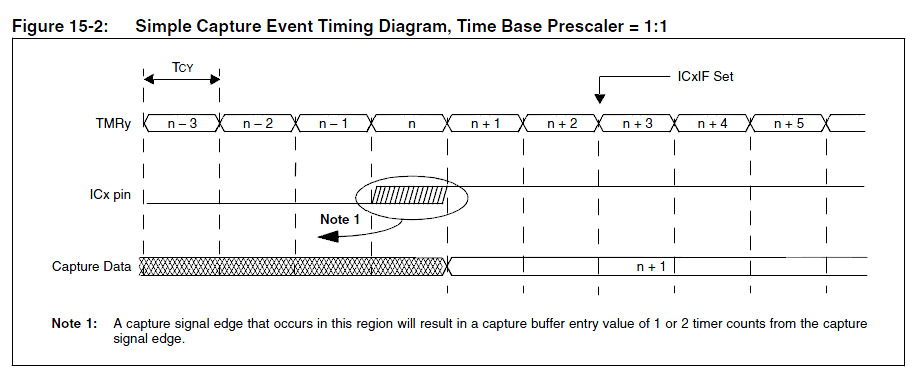
Нашёл я ответ в документации на pic24f
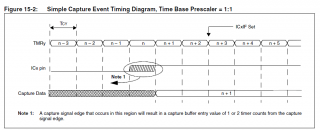
Note1 просто убило.
-Таймер, ты сколько импульсов сосчитал?
-Ну, сэм-восэм, не больше.
-
Так изучай-не изучай, повлиять на работу ея я всё равно не могу, отключить - тоже. С таймером всё более-менее понятно и оговорено в даташите - время от входного фронта до изменения состояния 0.75-1.75 цикла.
0-1 цикл - задержка синхронизации, то есть обычный Д-триггер, 0.75 цикла - сам таймер. А вот с input capture тайминги не оговариваюся. есть старый аппнот 96 года по семейству pic17, appnote где на стр.8 нарисованы тайминги работы, так как я их себе представлял (но не так, как на самом деле в pic24)
-
Опубликовано · Изменено пользователем shkal · Пожаловаться
Написал простейшую тестовую программу (инициализацию опускаю). IC1 захватывает TMR3.
int main() { while (1) {}; } void __attribute__((__interrupt__)) _IC1Interrupt(void) { unsigned int a,b; b=TMR3; a=IC1BUF; if (a==b ) { ok1++; } else { error1++; } counter++; IFS0bits.IC1IF=0; //reset interrupt flag }независимо от входной частоты этот код дает 75% счётчика ок и 25% счётчика error от общего числа циклов. Я в
ах....прострации
-
При любых. Даже очень низких, хоть 1 Гц.
Тут, похоже, дело не в алгоритме. У меня есть такое впечатление, что, когда один и тот же фронт приходит и на IC1, и на таймер, который она захватывает, то
иногда сначала срабатывает таймер, а потом IC, а иногда наоборот, и зависит это от фазы входного фронта по отношению к фронту тактовой.
-
Зачем опорную частоту надо заводить на пин и считать, когда от нее можно просто затактировать сам процессор?
Измеряемую частоту заведите на счетчик, и одно прерывание по Т1 - истечение периода усреднения.
Опора на внешний пин не заводится, Т3 считает внутренний клок.
Вы ссылку на алгоритм посмотрели, которую я дал? Там извращенность подхода тщательно обсуждается.
-
Добрый день всем. Я попал в некоторый затык и не могу выбраться из него без посторонней помощи.
Итак, пишется реализация частотомера по алгоритму, приведённому здесь
Входные импульсы считаются таймером Т2, опорные - Т3. Входы IC1 IC2 T2CK - физически один пин, мэппинг с помощью PPS. IC1 захватывает Т2, IC2 захватывает T3.
Функция F_init() инициализирует переферию.
Функция F_start() запускает цикл измерения частоты.
По первому прерывнию от IC1 сохраняются пары значений F_osc_start, F_in_start и счётчики переполнения таймеров over2_start, over3_start.
Далее модули IC1 IC2 выключаются и запускается на время gate_time таймер Т5. По его прерыванию модули IC1 IC2 опять включаются, и после очередного фронта входного сигнала в прерывании IC1
сохраняются пары значений F_osc_end, F_in_end и счётчиков переполнения таймеров over2_end, over3_end. Устанавливается флаг new_data.
В main'е крутиться простейшая state machine, после установки флага new_data значение частот вычисляется функцией F_calc() и отображается на ЛСД.
main() { F_init(); while(1) { switch (main_state) { case 0: F_start(200); main_state=1; break; case 1: if (new_data) { Freq=F_calc(); LCDWriteCmd(0x01); // clear display delay_ms(2); if (Freq == 0) { LCDputstr ("NO SIGNAL"); } else { sprintf(F_display, "%15f", Freq); LCDputstr(F_display); } new_data=0; main_state=0; } break; } }void F_init(void) { // init timer2 for external clock T2CONbits.TON = 0; // Disable Timer T2CONbits.TCS = 1; // Select external clock T2CONbits.TGATE = 0; // Disable Gated Timer mode T2CONbits.TCKPS = 0b00; // 1:1 prescaler T2CONbits.T32 = 0; // 16bit mode TMR2 = 0x00; // Clear timer register PR2=0xffff; IPC1bits.T2IP = 6; // INT priority=6 IFS0bits.T2IF = 0; // Clear Timer1 Interrupt Flag IEC0bits.T2IE = 1; // Enable Timer1 interrupt // init timer 3 T3CONbits.TON = 0; // Disable Timer T3CONbits.TCS = 0; // Select internal clock T3CONbits.TCKPS = 0b00; // 1:1 prescaler T3CONbits.TGATE = 0; // Disable Gated Timer mode TMR3 = 0x00; // Clear timer register PR3=0xffff; IPC2bits.T3IP = 6; //INT priorty=6 IFS0bits.T3IF = 0; // Clear Timer1 Interrupt Flag IEC0bits.T3IE = 1; // Enable Timer1 interrupt // init timer 5 for 0.2c T5CONbits.TON = 0; // Disable Timer T5CONbits.TCS = 0; // Select internal clock T5CONbits.TCKPS = 0b11; // 1:256 prescaler T5CONbits.TGATE = 0; // Disable Gated Timer mode TMR5 = 0x00; // Clear timer register PR5=2879; IPC7bits.T5IP = 4; //INT priorty=4 IFS1bits.T5IF = 0; // Clear Timer1 Interrupt Flag IEC1bits.T5IE = 1; // Enable Timer1 interrupt // init input capture 1 on Timer 2 IC1CONbits.ICM= 0b000; // Disable Input Capture 1 module IC1CONbits.ICTMR= 1; // Select Timer2 as the IC2 Time base IC1CONbits.ICI= 0b00; // Interrupt on every capture event IPC0bits.IC1IP = 6; // Setup IC1 interrupt priority level IFS0bits.IC1IF = 0; // Clear IC1 Interrupt Status Flag IEC0bits.IC1IE = 1; // Enable IC1 interrupt // init input capture 1 on Timer 3 IC2CONbits.ICM= 0b000; // Disable Input Capture 2 module IC2CONbits.ICTMR= 0; // Select Timer3 as the IC2 Time base IC2CONbits.ICI= 0b00; // Interrupt on every capture event - INT from IC2 DISABLED!!! // IPC0bits.IC1IP = 6; // Setup IC1 interrupt priority level // IFS0bits.IC1IF = 0; // Clear IC1 Interrupt Status Flag // IEC0bits.IC1IE = 1; // Enable IC1 interrupt gate_flag=0; } void F_start (unsigned int gate_time) { unsigned int scale; T5CONbits.TON = 0; scale = gate_time*(3125/(TOSC*8)) ; TMR5 = 0x00; // Clear timer register PR5=scale; new_data=0; T2_over=0; //Clear TMR2 overflow T3_over=0; //Clear TMR3 overflow TMR2 = 0x00; //Clear timer 2 TMR3 = 0x00; //Clear timer 3 T2CONbits.TON = 1; //Start Timer 2 T3CONbits.TON = 1; //Start Timer 3 IC1CONbits.ICM= 0b011; // Enable IC1, every rising edge IC2CONbits.ICM= 0b011; // Enable IC2, every rising edge } void __attribute__((__interrupt__)) _T2Interrupt( void ) { T2_over++ ; IFS0bits.T2IF = 0; /* reset timer interrupt flag */ } void __attribute__((__interrupt__)) _T3Interrupt( void ) { T3_over++ ; IFS0bits.T3IF = 0; /* reset timer interrupt flag */ } void __attribute__((__interrupt__)) _T5Interrupt( void ) { T5CONbits.TON = 0; IC1CONbits.ICM= 0b011; //Enable IC1 , on every rising edge IC2CONbits.ICM= 0b011; //Enable IC2 , on every rising edge IFS1bits.T5IF = 0; /* reset timer interrupt flag */ } // Capture Interrupt Service Routine void __attribute__((__interrupt__)) _IC1Interrupt(void) { unsigned int tmp; if (!gate_flag) { F_osc_start=IC2BUF; IC2CONbits.ICM= 0b000; //Turn OFF IC2 F_in_start=IC1BUF; IC1CONbits.ICM= 0b000; //Turn OFF IC1 module over2_start=T2_over; over3_start=T3_over; while (IC1CONbits.ICBNE) { tmp=IC1BUF; } while (IC2CONbits.ICBNE) { tmp=IC2BUF; } gate_flag=1; T5CONbits.TON = 1; //start timer5 } else { F_osc_end=IC2BUF; IC2CONbits.ICM= 0b000; //Turn OFF IC2 F_in_end=IC1BUF; IC1CONbits.ICM= 0b000; //Turn OFF IC1 module over2_end=T2_over; over3_end=T3_over; T2CONbits.TON = 0; //Stop Timer 2 T3CONbits.TON = 0; //Stop Timer 3 while (IC1CONbits.ICBNE) { tmp=IC1BUF; } while (IC2CONbits.ICBNE) { tmp=IC2BUF; } gate_flag=0; new_data=1; } IFS0bits.IC1IF=0; //reset interrupt flag } float F_calc(void) { float F; float M; //input pulse count float N; //clock pulse count unsigned long A1,A2 ; A1=((unsigned long)(over2_end-over2_start))<<16; A2=((unsigned long)(over3_end-over3_start))<<16; M=A1+(F_in_end-F_in_start); N=A2+(F_osc_end-F_osc_start); if (M == 0) F=0; else F=(OSCIL*M)/N; return F; }Проблема заключается в том, что данный код примерно в 80% циклов выдаёт правильное значение частоты, а в 20% - таймер Т2 пропускает 1 входной импульс, причем это происходит совершенно хаотично, никакой закономерности я уловить не смог.
Уже довольно долго бьюсь с отладкой, но всё мимо. Будут ли какие-нибудь идеи о причинах такого поведения?
-
Опору измерять значительно проще, т.к. постоянное напряжение, да и полно ЦАПов со встроенными опорами. Для измерения 10-20КГц с такой точность нужно что-то типа Agilent 34410a
-
Такой например http://focus.ti.com/docs/prod/folders/print/pcm1781.html
Можно и промышленный 14-16 битный цап взять с SPI-интерфейсом, контроллеров с I2S на борту не очень много.
-
Микроконтроллер с выходом I2S и звуковой ЦАП. Контроллер формирует отсчёты синуса в цифре и отдаёт ЦАПу. Точность напряжения равна точности ЦАПа. 16 бит хватит с большим запасом. Возможно ещё выходной буфер, редкий ЦАП с выходом по напряжению работает на 200 Ом.
-
Нет, не имел с ним дело

Точность вычисления с плавающей точкой ?
в PIC
Опубликовано · Пожаловаться
64 бита стандартный IEEE-754