


ruslannd
-
Постов
113 -
Зарегистрирован
-
Посещение
Информация о ruslannd
-
Звание
Частый гость
")
Посетители профиля
1 582 просмотра профиля
-
Странное поведение GD32E230 после подачи питания
ruslannd опубликовал тема в ARM, 32bit
Доброго времени суток! Делаю малопотребляющее устройство на GD32E230 (Cortex-M23) В Общем и целом получилось добиться потребления, соответствующего заявленному производителем. Но при испытаниях был обнаружен баг - после включения питания контроллер некоторое время имеет повышенное потребление, которое за время от одной секунды (при +25оС) до нескольких минут (при -40) приходит в норму. Причем, чем больше проходит времени после последнего выключения, тем дольше длится этот процесс. Как будо-то идет заряд емкости. На картинке осцилограма тока потребления контроллера на который подано только питания и все выходы/выходы висят в воздухе. По питанию блокировочные конденсаторы сняты (когда они были запаяны, картина было такой же). Тактирование идет от внутреннего RC генератора без PLL. Порты контроллера настроены как аналоговые входы и пальпирование к хоть немного заметному изменению потребления тока не приводит. Что это может быть? Предлагайте самые умные и безумные идеи))))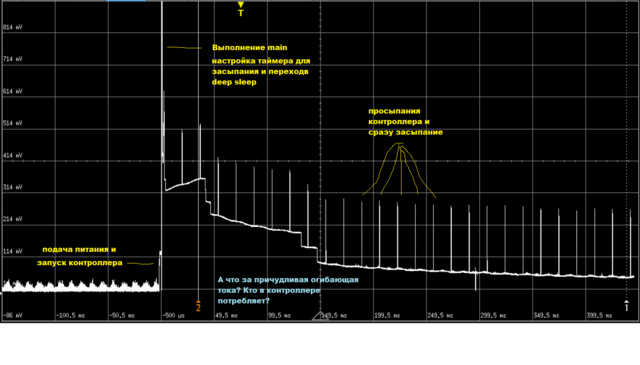
-
Помогите, плс, опознать разъем
ruslannd опубликовал тема в Компоненты
Всем привет. Помогите, плс, опознать разъем. На картинках кабельная и блочная части.

.thumb.jpg.895984add7ebf473a8f13f4723202aa1.jpg)



.jpg.9baf1ea8a0b36a1872be5b4c8722cd34.jpg)