Лидеры


Популярный контент
Показан контент с высокой репутацией 02.05.2024 во всех областях
-
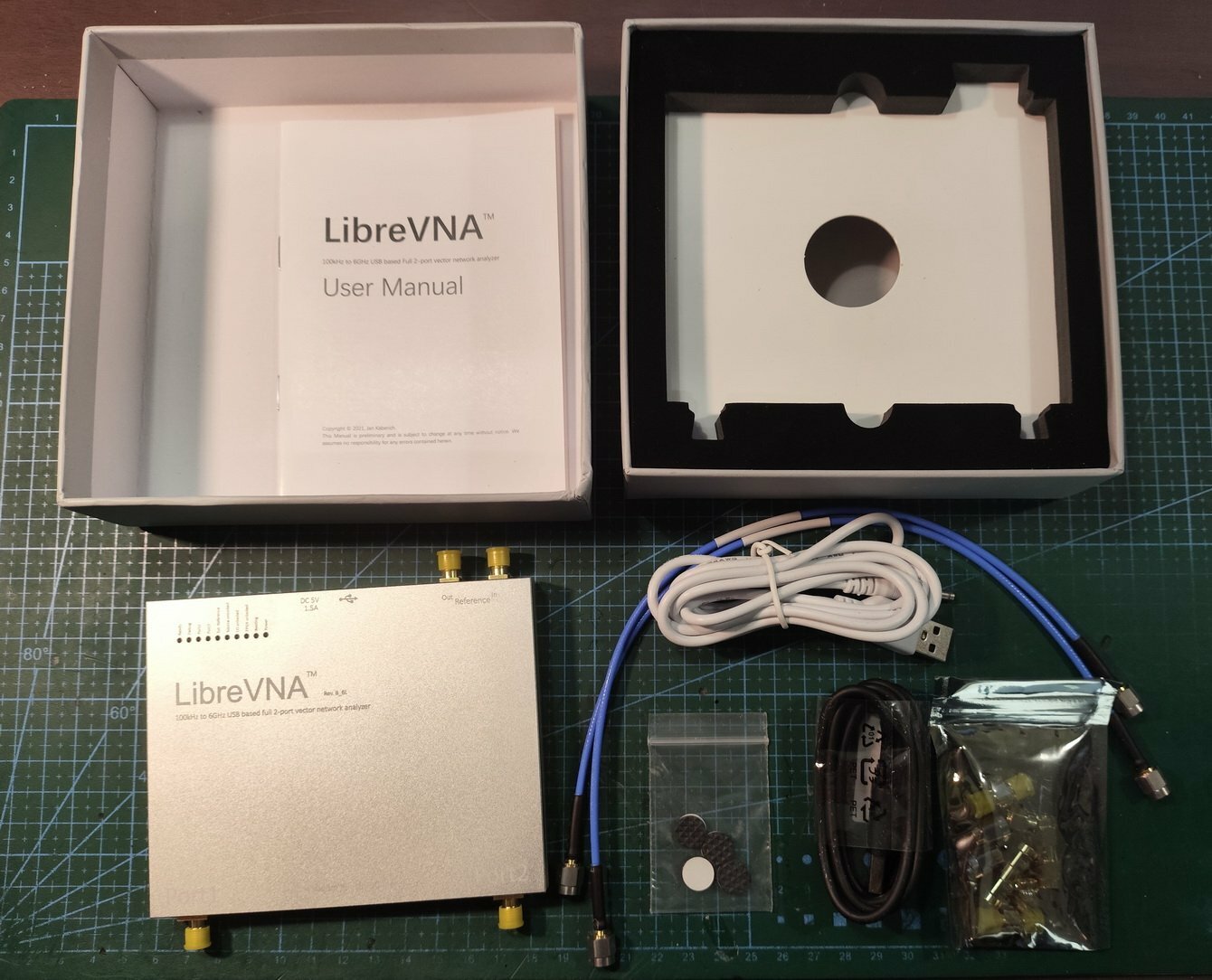
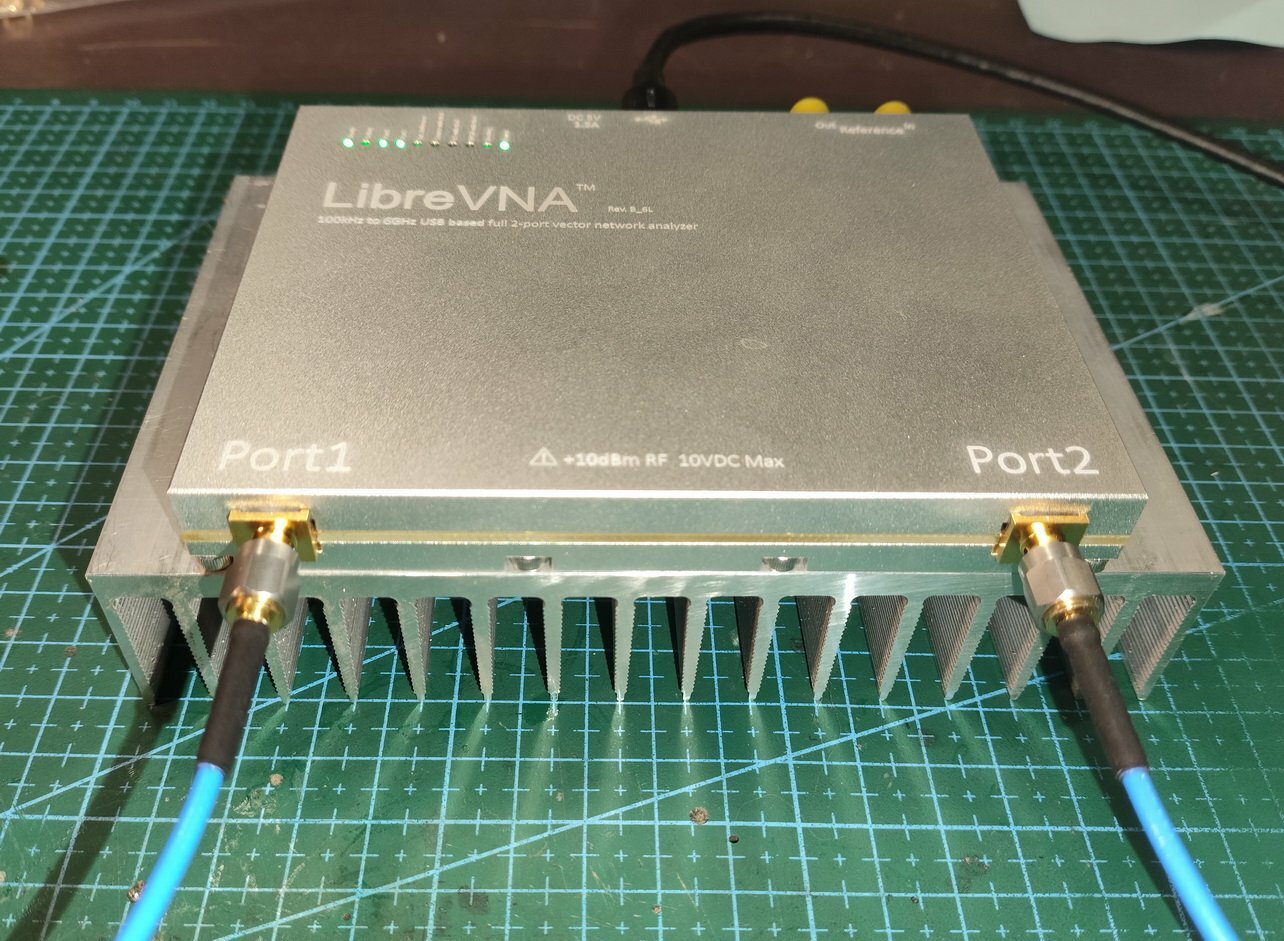
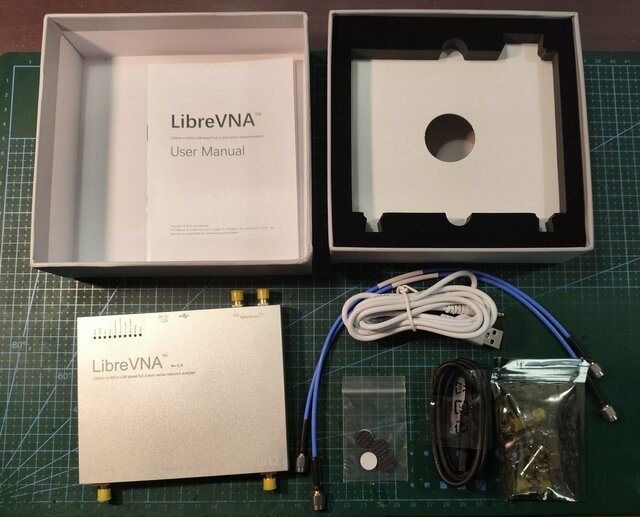
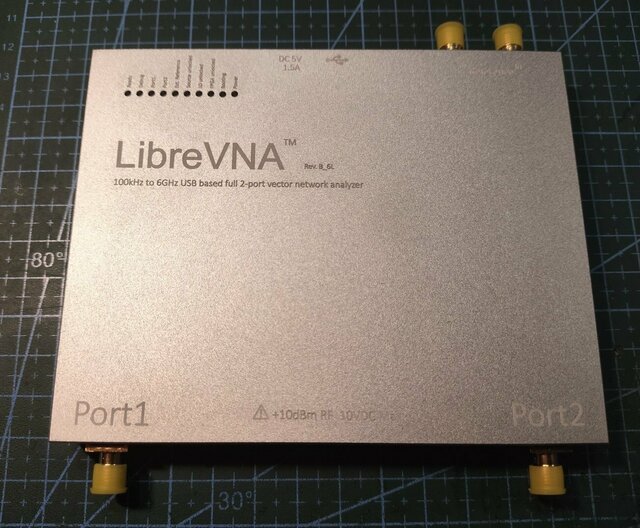
Очень интересное получилось обсуждение, но все же немного о самом LibreVNA – получил наконец-таки его сегодня. Как не странно были проблемы с отправкой заказа в Россию у рекомендованного разработчиком продавца. За время ожидания посылки удалось посмотреть доступные видео по теме и немного освоить ПО LibreVNA-GUI. Несколько слов о первых впечатлениях – и они в целом хорошие. Сам VNA ощутимо меньше и тяжелее ожидаемого. Для долгой работы из-за нагрева корпуса VNA желательно положить на плоский радиатор без установки снизу резиновых ножек. При пассивном радиаторе, показанном на фото, максимальная температура корпуса после 3 часов работы составила 37 градусов Цельсия. Комплект поставки достаточно продуманный и полный – есть все необходимое для начала работы: - сам прибор LibreVNA - два ВЧ измерительных кабеля SS405 длиной 30 см с разъемами SMA - SMA калибровочный набор : Load 2 шт. / Open / Short / Thru-F 2 шт. / Thru-M 2 шт. - кабель для ПК: USB-A / USB-C - кабель питания - резиновые ножки Установка драйверов не потребовалась, ПК с Win11 определила VNA сама и ПО запустилось сразу же без каких-либо танцев с бубнами. ПО LibreVNA-GUI достаточно дружественное и интуитивно понятное. Описание есть на английском и оно достаточно полное. Пока только начинаю сравнивать, но уже видно, что LibreVNA существенно лучше ARINST VNA DL по следующим возможностям: - регулировка выходной мощности - полная калибровка обоих портов и соответственно более правильным результатам измерений - динамический диапазон (хотя, на мой взгляд, 95 дБ в диапазоне до 3 ГГц там все же нет ) - прибор может работать в одном из трех режимов: VNA / анализатор спектра /ВЧ генератор в диапазоне частот до 6 ГГц. Большое спасибо продавцу (Zeenko Store) – он реально помог с отправкой заказа.


 1 балл
1 балл -
Лучше всего на 7022 ориентироваться. А по соединению можно еще тут почитать. Это для 7022, но идеология та же. SIM7022 Series_Network Searching_Application Note_V1.00.pdf1 балл
-
В личку загляните, я там написал что и как.1 балл
-
В этом вы ошибаетесь сильно: у меня все разрабатываемые контроллеры нафаршированы максимально) Под задачу я выбираю МК из типовых (что уже серийно используем, чтоб не раздувать номенклатуру), затем свободные ресурсы задействую для добавления функционала в перспективе. Я максимально использую аппаратные возможности МК. "Хоть поллингом флагов" это не призыв к действию, а иллюстрация простоты задачи. Для захвата ШИМ я использую два варианта: 1) с обработкой в реальном времени каждого импульса в прерывании; 2) с постобработкой порции или всего пакета импульсов в связке TIM+DMA. ТС не поставил никакой практической задачи, поэтому конкретно ответить сложно, но это точно не "использовать нормальный МК". Когда мы подменяем принцип выбора подходящего под задачу камня, нытьем танцора, которому в "обычных" МК все жмет. Не хочу переходить на личности, но мимо заявления о существовании неких "нормальных" МК пройти не смог. Итого, ТСу нужно зафиксировать задачу. Если это анти-ШИМ чего-то нешустрого, то советую освоить TIM+ISR. Для более шустрого, но не требовательного с реалтайму - TIM+DMA. Это закроет 99% типовых потребностей. Будут вопросы - поможем. Если задачу экстремалить, т.е. повышать частоту до предела, то, разумеется, в этот предел упрешься, а там уже принципиально иные способы решения могут возникнуть. Вместо этого рекомендую освоить TIM_master+TIM_slave - добавит в копилку решений еще 0.99%1 балл
-
Например - есть у XMC4xxx. У всех МК семейства. Начиная с младших. Глубиной = 4. Может и у более младшего семейства (XMC1xxx) есть - не смотрел. PS: Наличие FIFO гораздо важнее, чем DMA. Позволяет регистрировать импульсы хоть в 1 такт.1 балл