MPetrovich
-
Постов
804 -
Зарегистрирован
-
Посещение
-
Победитель дней
1
Информация о MPetrovich
-
Звание
Знающий
")
Посетители профиля
2 862 просмотра профиля


-
У меня Zero Crossing детектируется при PWM_ON. Если есть нужда крутить ооочень медленно, то лучше делать при PWM_OFF. Однако, при таком методе коммутации, медленно крутить скорее всего не получится из-за малого значения Back EMF, да и из-за самой формы напряжения в обмотках. Так что предпочтительнее детектирование перехода через ноль при PWM_ON. Напряжение, измеренное АЦП нужно сравнивать с половиной напряжения питания силовых каскадов. Почитайтеапнот от ATMel. Я, к сожалению не могу сходу вспомнить название, но помню, что там используют ATMega48.
-
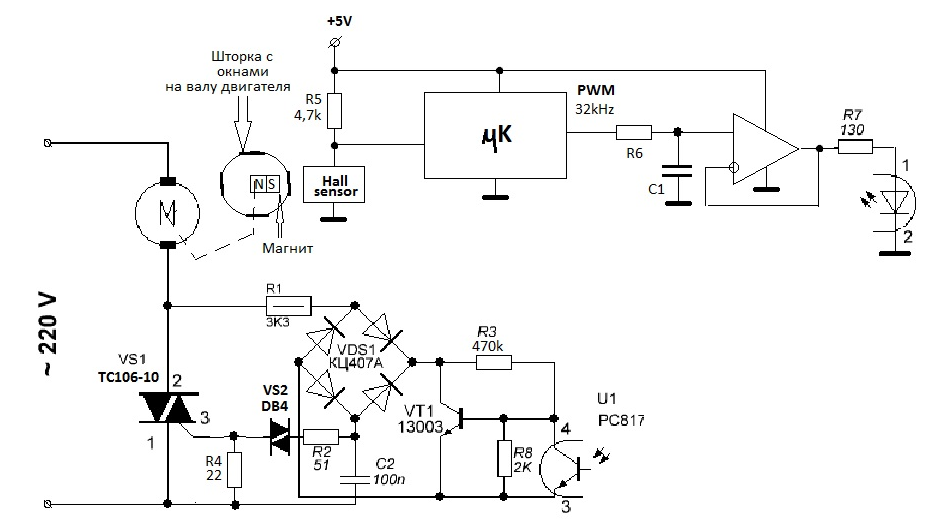
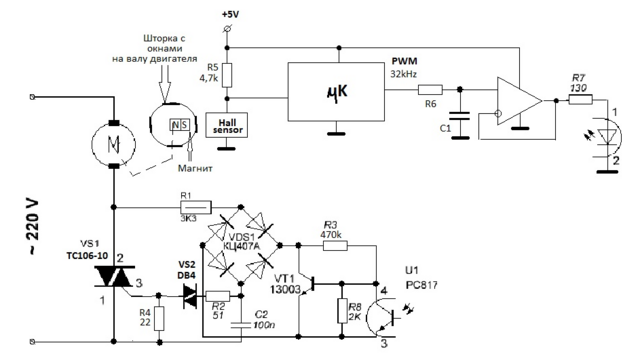
Всех приветствую. На работе есть точильный станок с коллекторным двигателем. на нем стоит крутилка якобы для регулировки оборотов. Однако, обороты по факту не регулируются. Регулируется лишь скорость набора оборотов. Решили сделать регулятор с ОС, который следит за оборотами иия поддерживает заданную скорость вращения. Сделали шторку-стаканчик с 4-мя прорезями, закрепили на оси точила. От корпуса идет планка, на ней внутри шторки магнит, а снаружи шторки датчик холл. Получилось примерно как формирователь импульсов для бесконтактного зажигания ну ВАЗ-2109))) В результате с датчика Холла снимаются импульсы, длительность которых зависит от оборотов. Далее МК считает в прерывании по заднему фронту длительность этих импульсов, сравнивает с заданным значением (задается потенциометром через АЦП) и увеличивает или уменьшает длительность рабочего цикла ШИМ в зависимости от оборотов. Цифровая часть работает без вопросов, непонятки с аналоговой частью... Вот схема, которую мы применили. Проблема в том, что не получается добиться плавной регулировки в диапазоне малых и средних мощностей. Диапазон относительно плавного регулирования находится рядом с падением напряжения на светодиоде оптопары - около 1,1В. Пробовали ставить в эмиттер оптотранзистора оптопары дополнительное сопротивление - стало немного лучше но не сильно. Сейчас цифровая часть не подключена, испытываем подавая напряжение на R7. Вместо мотора лампа накаливания 60Вт для наглядности регулировки. P.S .Диак (динистор) DB4 имеет напряжение пробоя 35...45В, он был в наличии, другого не было. Вообще, как мне видится, можно наверное использовать вместо него два включенных встречно стабилитрона/супрессора с нужным напряжением пробоя. Прав ли я?
-
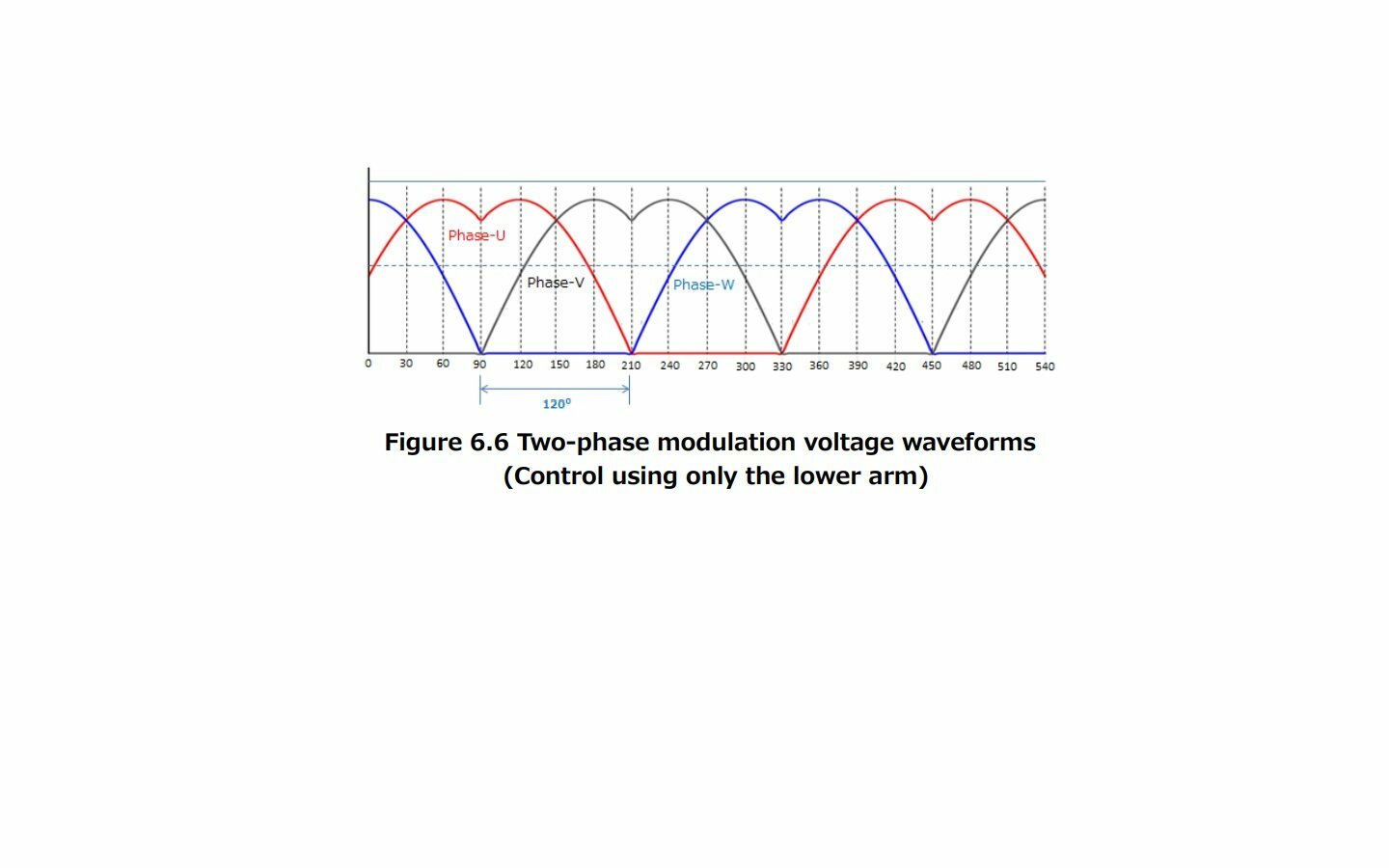
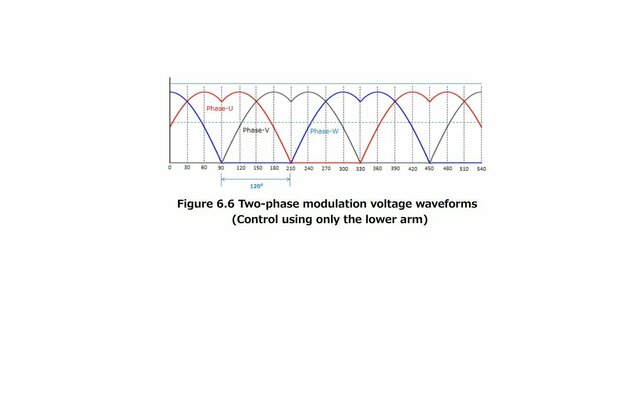
Будет ли вектрным управление согласно изображения выше, если принять за проекции этого вектора на оси моментальные значения напряжений на фазах? Поскольку в течении 120 градусов одна из фаз равна нулю, то оперировать придётся всего с двумя значениями вместо трёх. Это значительно упростит всё преобразования Кларка/Парка. Единственной затыкой остаётся измеритель оборотов... Я пока так и не придумал каким образом его реализовать. Да, ещё забыл уточнить- нужны датчики тока на всех 3-х фазах или достаточно одного общего?
-
Так вроде всё так и поступают))) Настраивают ШИМ-формирователи контроллера на выдачу трёх синхронных ШИМ, а потом только меняют к-т заполнения. Не понял что такое двухфазный вектор... Я полагаю это метод управления двигателем по двум фазам, в то время, как третья на земле (нижний ключ фазы открыт). Я таким пользуюсь, но в скалярном режиме.