777777
-
Постов
1 085 -
Зарегистрирован
-
Посещение
Информация о 777777
-
Звание
Профессионал
")
Посетители профиля
3 922 просмотра профиля



-
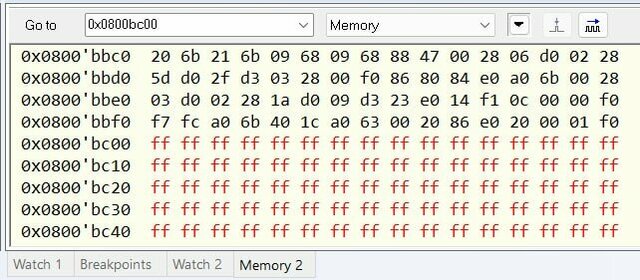
В какой-то момент, вероятно когда объём кода превысил некоторый порог, стала стираться флэш программ при выполнении отладки. Результатом стирания является переход на NMI. Стирается блоками по 1 килобайту, если выполнять какую-то отладку - остановиться на точке останова, пошагать и т.д. Иногда обнаруживаются несколько стёртых блоков. Происходит это совершенно стабильно по одному адресу. Если прошить отдельным загрузчиком (например JFlash) или сразу после загрузки выйти из отладчика, то программа запускается и работает. Если код изменить, например добавить что-то, то стираться будет по другому адресу, но столь же стабильно. Пробовал исключить стираемый участок, выделив для программы разделы, в которые не входит стираемый участок. Тогда линкер не размещает там код, но стираться начинают другие участки. Оказалось, что если заменить программатор JetLink на ST-Link, то проблема исчезает. Но он работает только с Cortex, а у нас есть проекты на других процессорах, не хотелось бы плодить программаторы. Встречался ли кто-нибудь с таким явлением и как с ним бороться?