-
Постов
24 -
Зарегистрирован
-
Посещение
Весь контент [email protected]
-
CPFSK 4 демодулятор
[email protected] ответил [email protected] тема в Алгоритмы ЦОС (DSP)
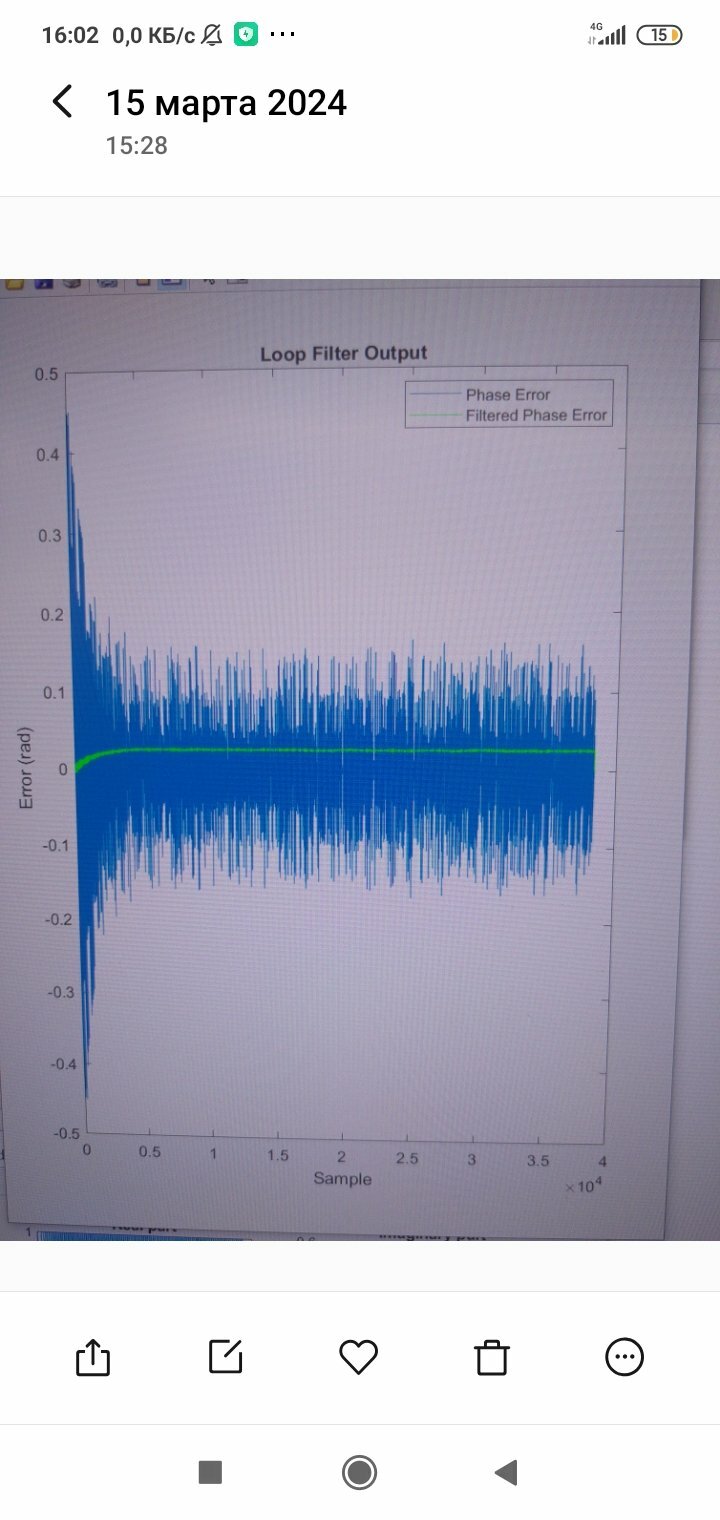
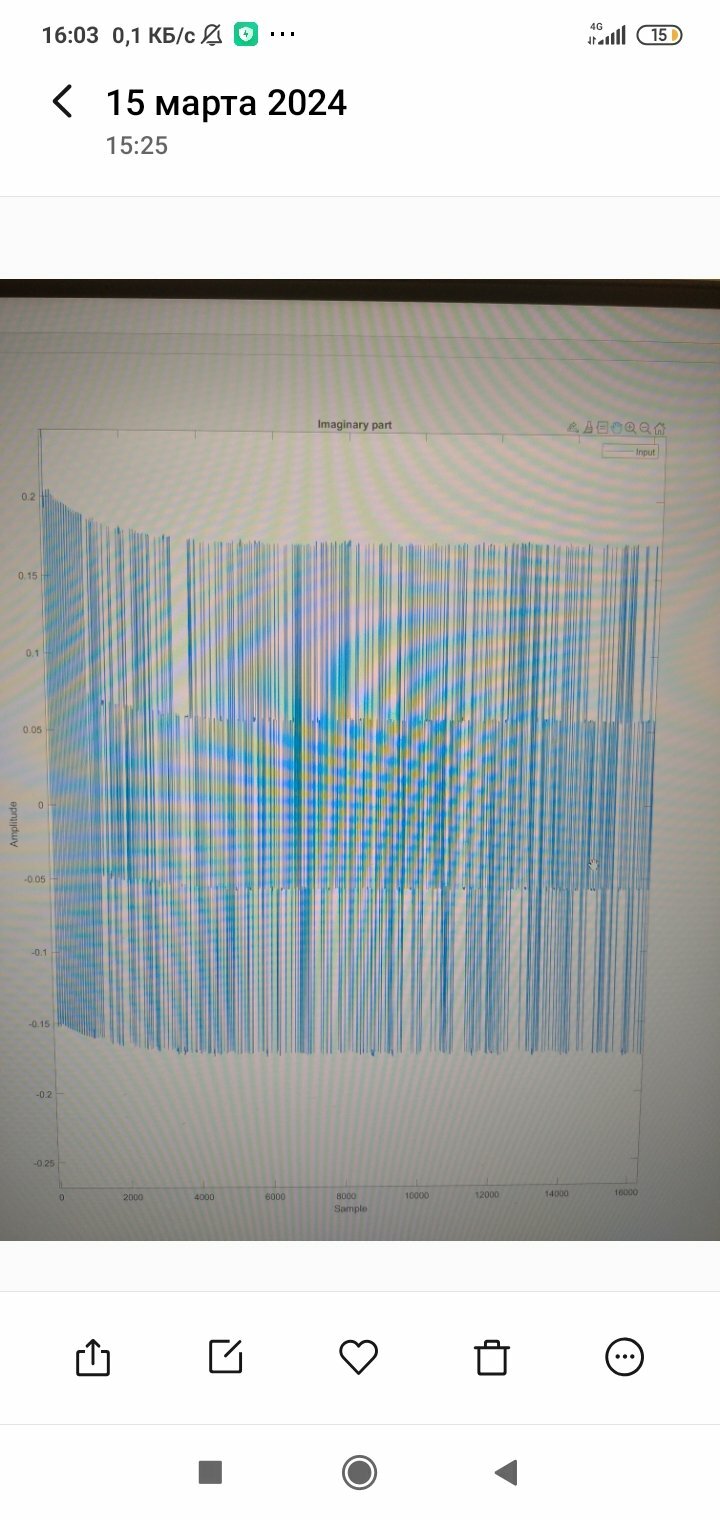
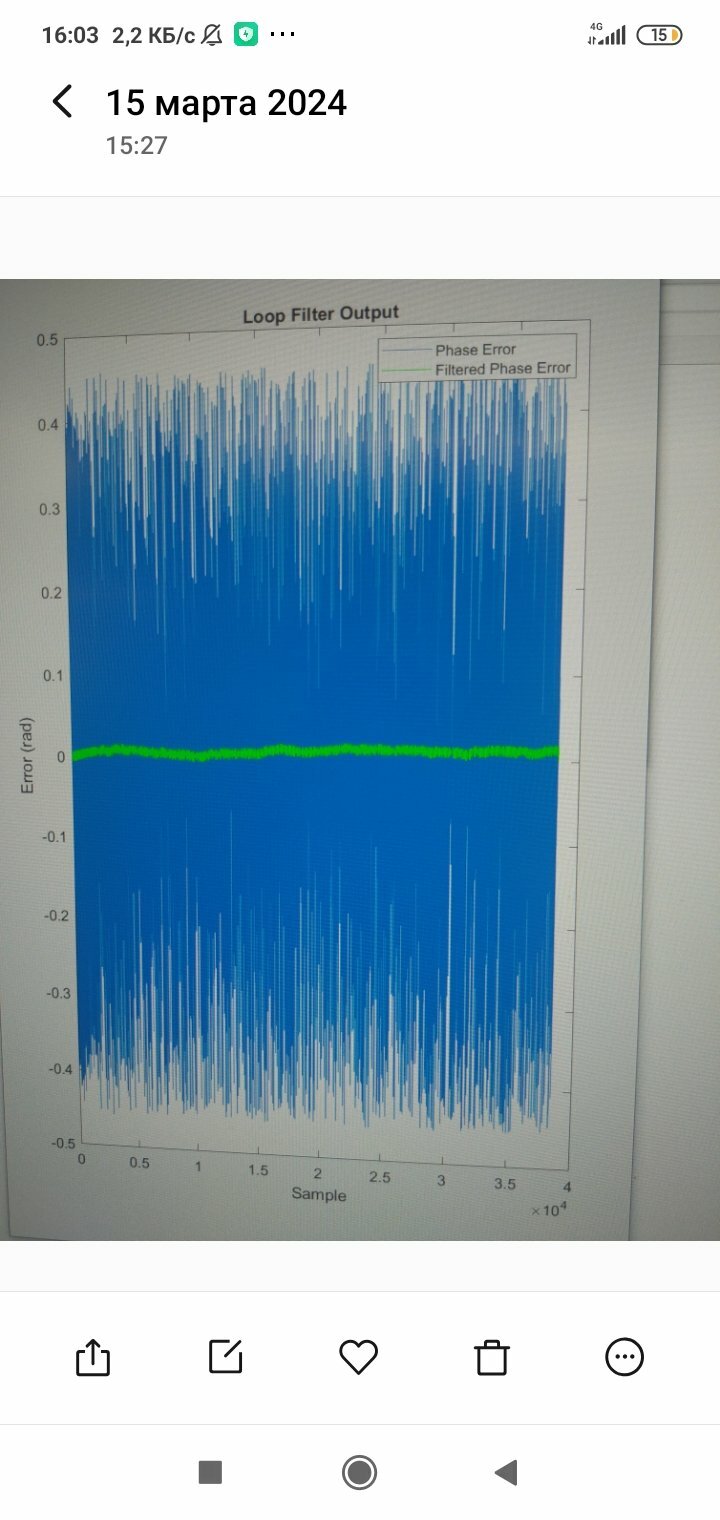
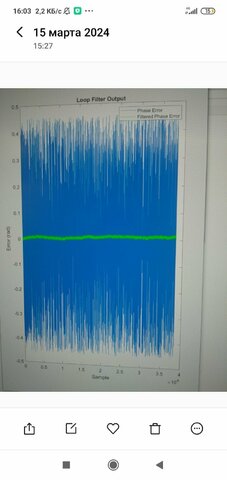
Сделал фапч, как Вы предлагаете с разницей между текущей разностью фаз и одной из предполагаемых. Понятно, что разница фаз считается на длительности 1 символа. Ожидаемо, работает только с cpfsk без памяти. На первом фото ошибка по частоте, рассчитанная таким способом и пид воздействие на DDS (зелёным) на втором фото сигнал, симметрично позиционированный около 0. А вот на 3ем фото ошибка, сгенерированная точно таким же сигналом, но с фильтром с памятью на 8 символов. И уже не работает. В связи с этим, у меня 2 вопроса: 1) можно ли сделать, что такой фапч работал для модуляции с памятью?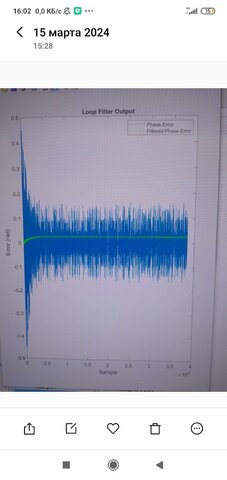

-
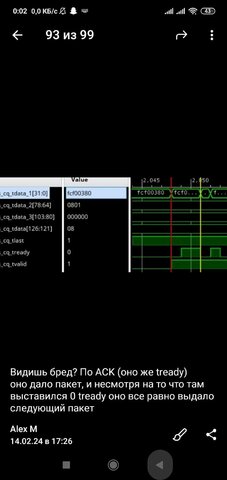
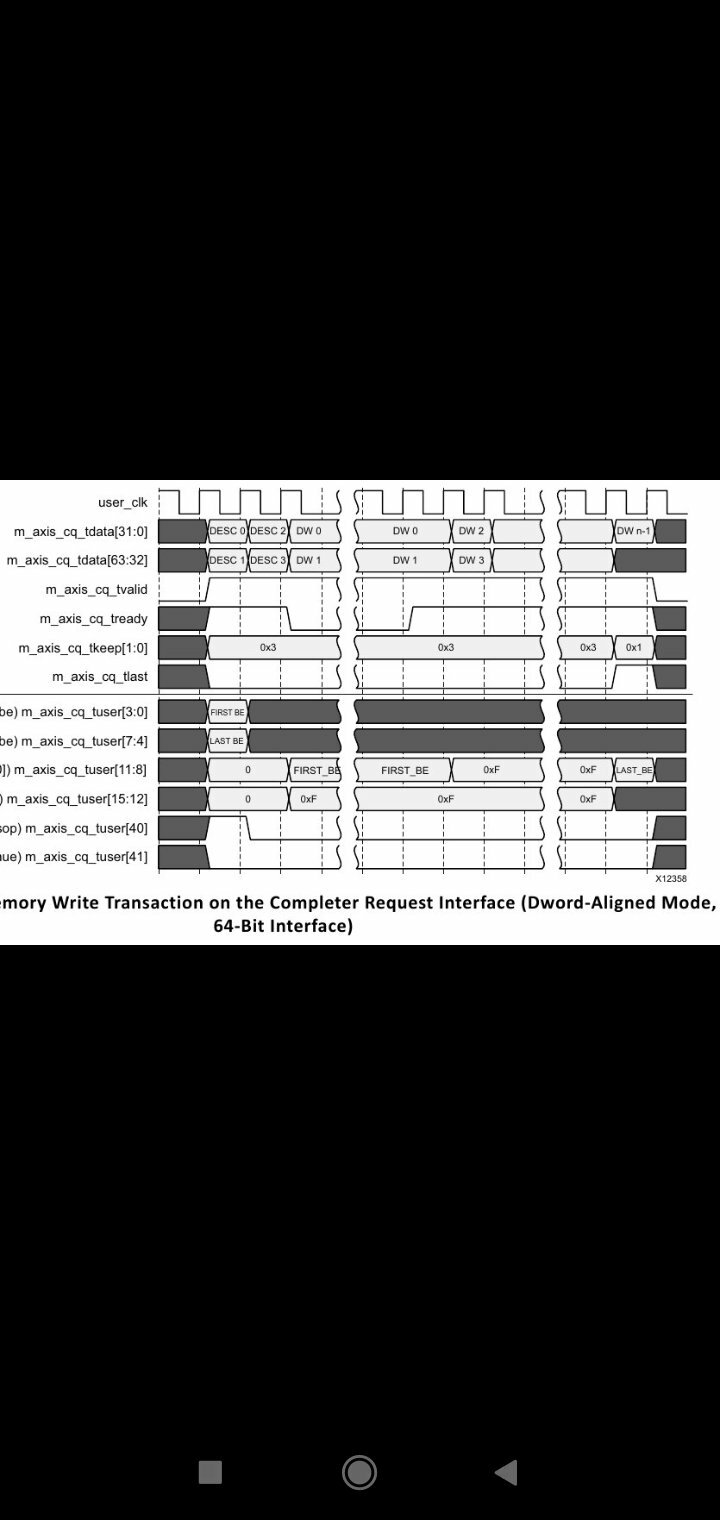
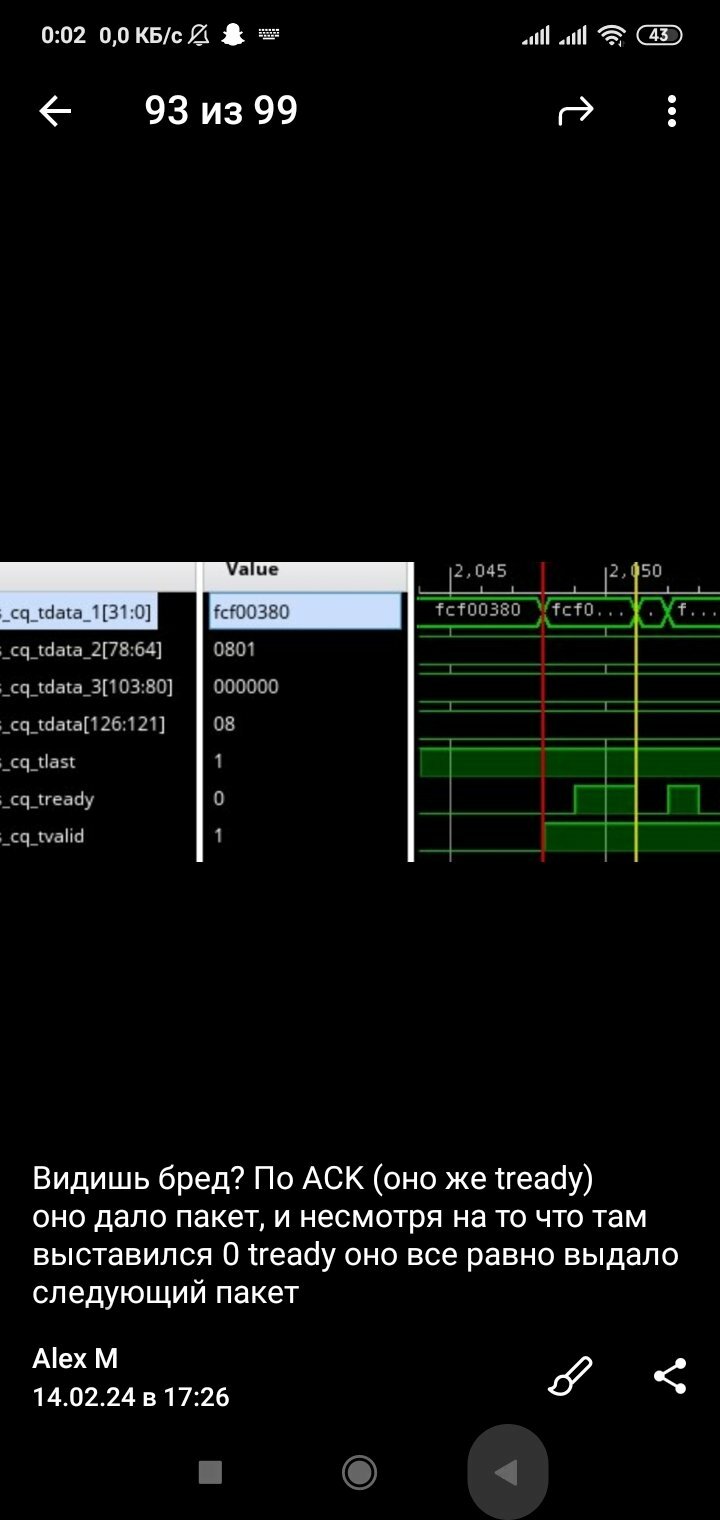
Добрый день! Создали тестовый проект на kintex ultra scale. Обмен по pcie работает, но смущает одна проблема. Иногда при записи в адрес пакеты повторяются. То есть, другими словами, я вижу valid, принимаю пакет, поднимаю ready и опускаю его в 0, а valid и last от ядра pcie продолжают висеть в "1". Это шина ПК дублирует пакет или это висит предыдущий? И если это происходит, то почему и как это исправить? Прилагаю фото из даташита как должно быть и фото Ila как есть