Prizrak_Kommunizma
-
Постов
141 -
Зарегистрирован
-
Посещение
Весь контент Prizrak_Kommunizma
-
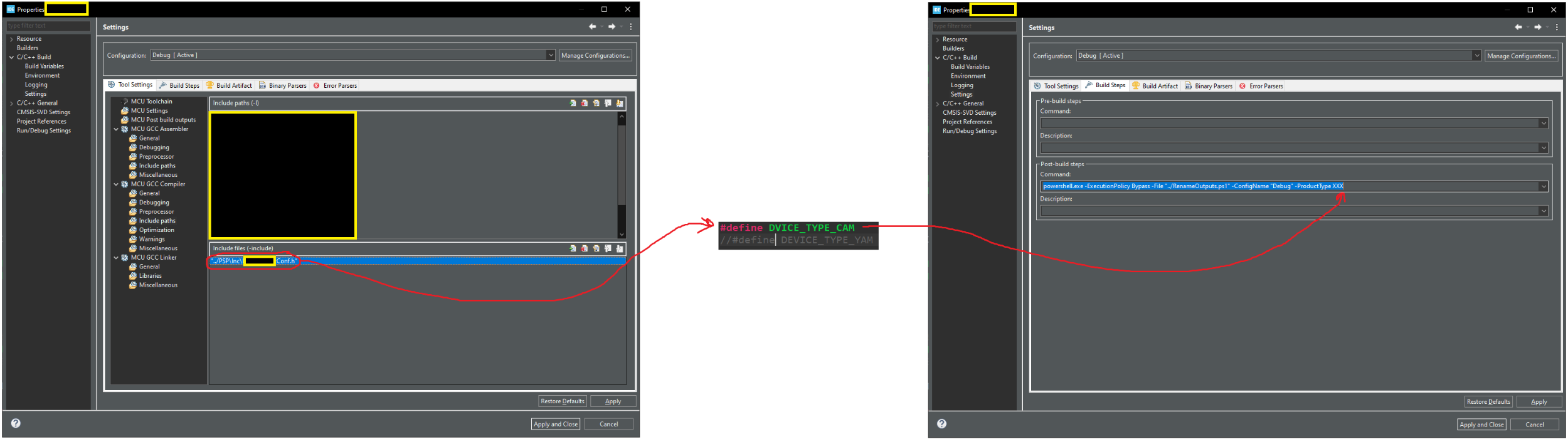
Всех приветствую. Вопрос по STM32CubeIDE, ну или по Eclipse, кому как нравится) Я использую в своём проекте файл Conf.h для того, чтобы делать условную компиляцию. А ещё использую дополнительный скрипт в post-build чтобы ренеймить выходной hex файл. Вопрос - можно ли в параметры этого скрипта из Eclipse передать константы, объявленные в Conf.h файле? Более наглядно свою хотелку показал на приложенной картинке ниже. Заранее оговорюсь - открывать этот файл и парсить его средствами скрипта не хочется.

-
А тем временем я решил пойти в другую сторону и попробовать убить небольшой пакетик. И знаете, что? У меня не получилось вызвать его возгарание без непосредственного протыкания. Я взял стандартный элемент LP401430, откусил плату защиты, выводы замыкал накоротко, пропускал через него 5 ампер в обоих направлениях грел паяльником до 350 градусов полчаса, от чего на нём остался отпечаток, но сам элемент не взорвался, только чутка вздулся. Фото прилагаю. Быть может в этом и есть секрет? Делают же кучу китайцев свой ширпотреб без какой-либо защиты. Быть может на таком размере акума прочность фольги корпуса выше энергии раздувания и бояться пожара бессмысленно?





-
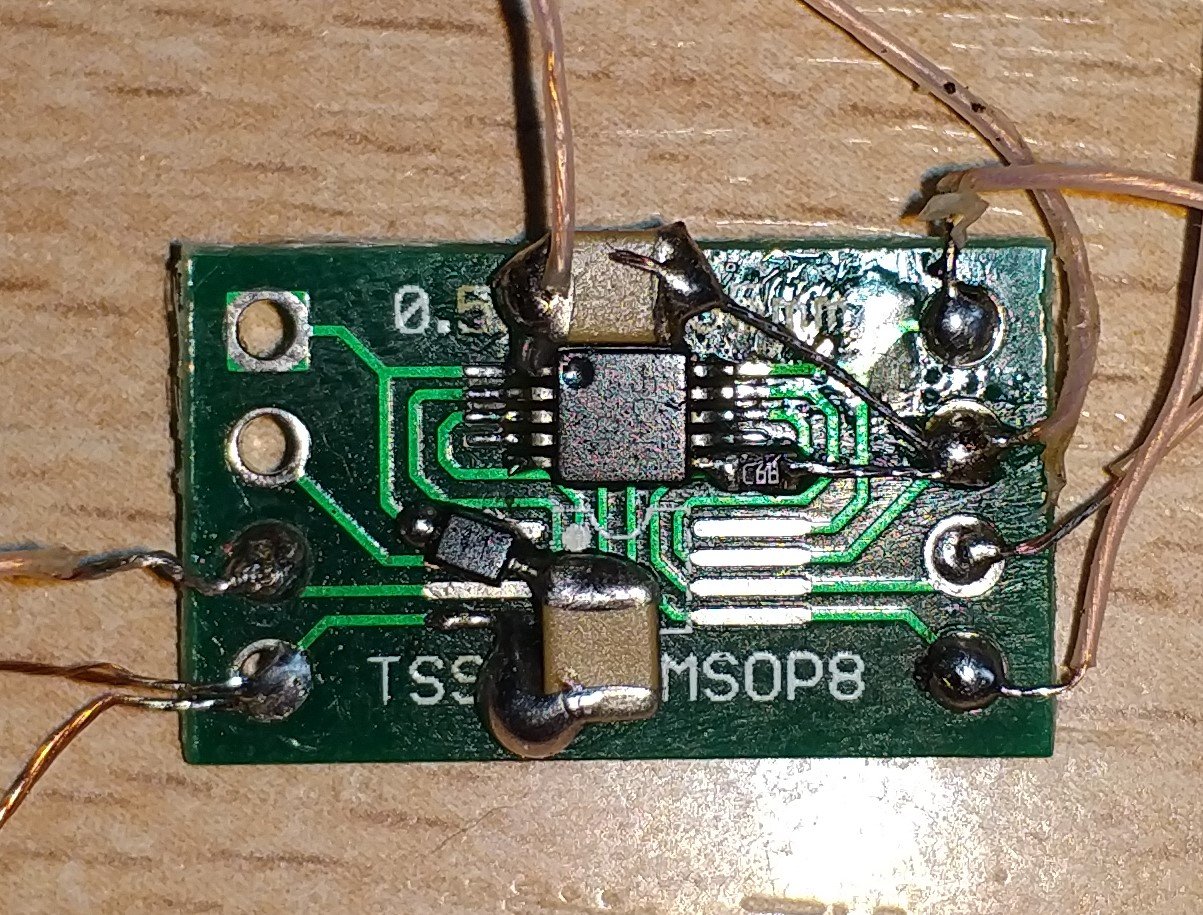
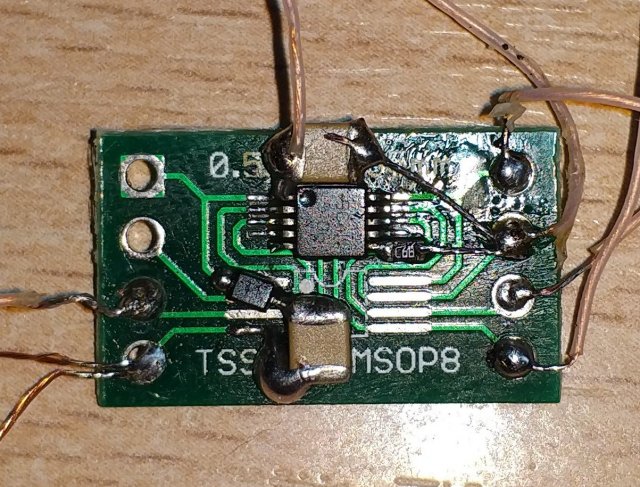
Всё что должно быть рядом с микрухой микросхемой, находится рабом с ней. Провода только до транзисторов и до питания. Всё сделано на монтажной платке: КЗ нет, соединения до ног микросхемы в норме. Всё прозванивал. Автор, выражайтесь техническим языком. Всякие "микрухи" и "транзюки" здесь неприемлемы. Модератор.
-
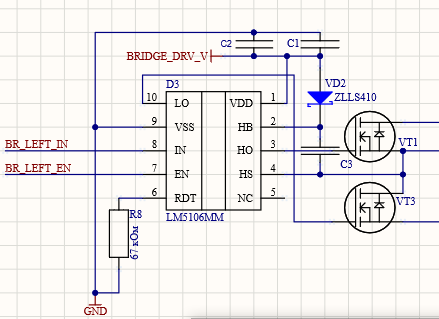
Приветствую всех. Хочу сделать распределённый драйвер двигателя на H мосте. Из соображений мощности и быстроты работы были выбраны транзисторы IPZ40N04S5L-4R8 и драйвер для них LM5106. Собрал вот такую схему на проводах: Конденсаторы по 0.1 мкф. BRIDGE_DRV_V = 12 V. Питание полумоста 2 ... 10 V (может быть разное в устройстве, так надо). Земля общая разумеется. Центр полумоста выводил просто на осциллограф, либо на резистор Вроде всё как в ДШ, но она не работает. Замыкаю Enable на питание BRIDGE_DRV_V. При этом Пытаюсь подавать питание или 0 на IN. Схема не реагирует. Подавая меандр на EN, можно добиться похожего на работу полумоста результата (вход IN почему-то можно игнорировать при этом), но только при подключении резистора между центром полумоста и питанием полумоста. В общем происходит нечто непонятное. Либо я взял совсем не тот драйвер, либо микросхемы поддельные с элитана пришли, я не знаю. Буду рад, если пнёте в нужном направлении. Любые замеры, необходимые для пинка, готов сделать. Заранее спасибо.