Lomax
-
Постов
46 -
Зарегистрирован
-
Посещение
Весь контент Lomax
-
Что ещё необходимо? Для трапециадального управления достаточно чтобы двигатель был трёхфазный синхронным и блок управления тянул был мотор по току и будет и bldc и pmsm работать
-
на большой частоте евращения, синусойда SWPWM, практически вырождается в Трапецию :)
-
gerber не соотвествует чертежу
Lomax опубликовал тема в Бесплатные САПР: KiCAD, EasyEDA, EAGLE и др.
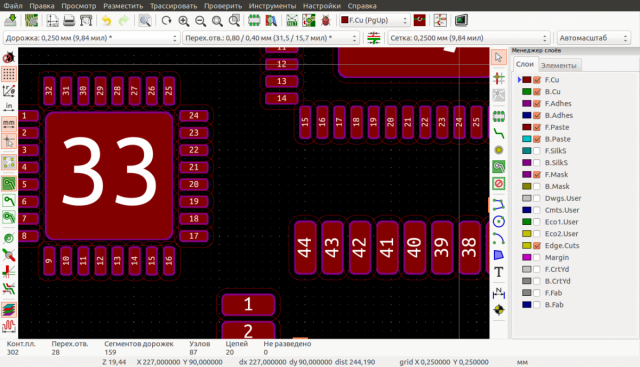
- Коллеги помогите. Почему гербер файлы не соовтетсвуют печатной плате, на ПП все выглядит нормально и правильно, на 3д модели тоже нормально, но когда преобразовываешь в гербер, почему то защитная маска на элементах qfn lqfp, становиться больше и не соотвествует ни ПП и КП картинки прилагаю
-
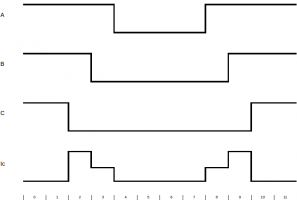
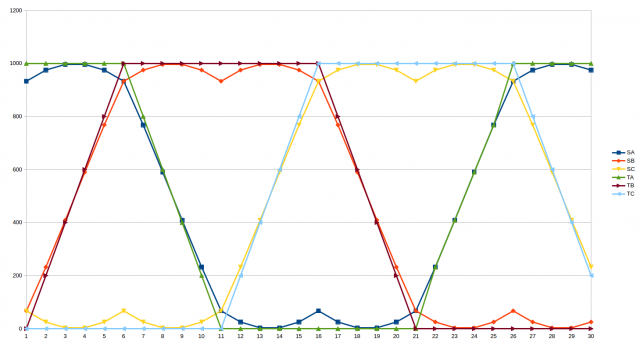
спасибо кеп потому что там ШИМ, а нужно среднее значение за период, а не мгновенное вы просто не поняли вопроса, вероятно в этом моя вина :) вопрос, как правильно определить интегральное значение тока, 1. в нужный момент (какой) определить амплитуду и умножить на скважность 2. взять множество значений тока за период и проинтегрировать 3. интегратор реализовать аппаратно картинка, форма тока, напряжение на фазах, ток на фазе C мгновенное значение тока не зависит от скважности