Димон Безпарольный
-
Постов
764 -
Зарегистрирован
-
Посещение
Весь контент Димон Безпарольный
-
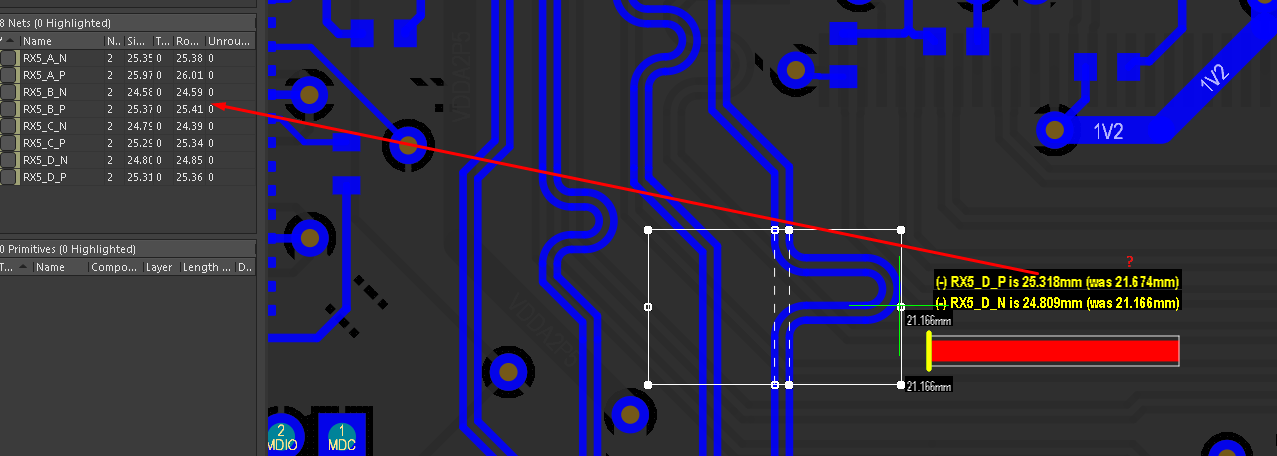
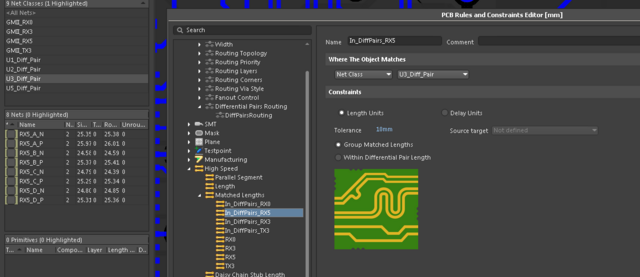
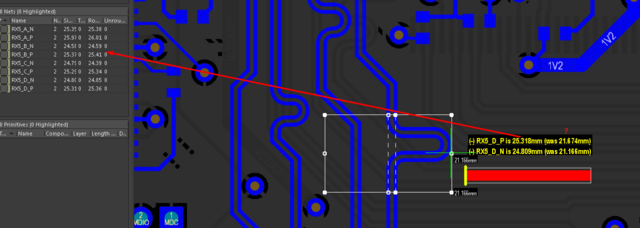
Создал правило для длин группы из 4 дифф. пар. Максимальная длина как видно - 25см. Когда выравниваю, движок показывает требование выровнять до 21см. Как такое возможно? Это глюк? И так во всех 4 группах, но требование к длинам разные.
-
HEF4070 продам 90 штук. 8р штука. 700руб всего.
Димон Безпарольный опубликовал тема в Продам
HEF4070 продам 90 штук. 8р штука. 700руб всего.

-
МС78L09 180шт продам. По 3р штука всего 500р
Димон Безпарольный опубликовал тема в Продам
МС78L09 180шт продам. По 3р штука всего 500р
-
Микросхемы NE556 830 штук. 3 рубля штука. 2400руб всего.
Димон Безпарольный опубликовал тема в Продам
Микросхемы NE556 830 штук. 3 рубля штука. 2400руб всего.

-
Я про этот красный крест: В одном проекте он есть, в другом никак не могу найти где включать. Закипел. Подскажите пожалуйста.


-
Какую функцию? На момент написания темы не было известно вообще что происходит. Собственно вся тема - от безысходности была написана. Оптимизация нужна была чтобы ужать код - он не должен быть больше чем 0x4800. Это бутлоадер. Знал бы что здесь такие плаваю - не стал бы писать вообще. Это каким надо быть чтобы глумится и требовать к себе уважения. Вот такими глупостями я уже давно не занимаюсь.
-
Разумеется, ничего не делать и критиковать проще всего. Я смотрю форум изрядно выродился раз тут такие "свои". Сюда приходят за советом, а получают высокомерный глум. Зачем? Тебя что все так сильно обижают что ты над другими глумишься? Описывать как я локализовал не буду - я смотрю тут критиканов полно. Для меня главное результат и он достигнут. Эти проблемы сначала надо выявить чтобы понять как не надо делать. Чем я и занялся. А ты видимо сразу умным родился или не понимаешь как приобретаются навыки? Да можешь не отвечать, все одно от тебя толку нет.