


ToR_TDA
-
Постов
295 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные ToR_TDA
-
-
А если сделать IIR эквалайзер с адаптацией по RLS алгоритму например ?
Безусловно, БИХ фильтр более эффективен при одинаковом числе коэффициентов чем КИХ, но, к сожалению, он имеет целый ряд недостатков которые не позволяют мне его использовать. Недопустимо бы возросли требования к разрядности коэффициентов, проблема устойчивости, переполнение аккумулятора и т.д. БИХ имеют лучшие показатели при проектировании типовых фильтров, а для моей задачи с АЧХ по точкам они малопригодны.
По поводу адаптации по RLS можно сказать, что программа расчета и обновления коэффициентов займет все вычислительное время, что у меня есть и его не останется на саму свертку. Хотя читал про интересные варианты LMS с переменным шагом сходимости.
-
1. Почему не увенчалось успехом? Не удалось сделать ifft в матлабе и умножить на окно?
2. Увеличивая длину фильтра и применяя окно Кайзера вы сможете добиться требуемых характеристик.
При расчете коэффициентов КИХ методом частотной выборки, описанной в статье, производится дискретизация комплексного коэффициента передачи на равностоящей сетке частот. Таким образом, если принять, что задержки в фильтре равны ≈1мкс (1.024МГц), а кол-во коэф. равно 16, то в интересующей меня полосе коррекции 8 - 256кГц окажутся только 4 узла дискретизации.
При таком подходе приближение к моим параметрам осуществилось бы при увеличении числа коэф. до 100.
-
Насколько стабильны характеристики каналов? Можно ли один раз рассчитать корректор или надо в реальном времени вести подстройку? ь
Подстройка в реальном времени желательна, но реализация ее сильно затруднена текущими вычислительными возможностями. Таким образом, канал во время работы считается стабильным, но при необходимости его характеристика может быть измерена повторно и произведена перенастройка.
Если у вас есть измеренная АЧХ Hm(w) и идеальная АЧХ H0(w), то АЧХ фильтра корректора H(w) = H0(w) / Hm(w). Т.о. вы получили АЧХ фильтра корректора. Разумеется в измеренной АЧХ не должно быть нулей, иначе все будет разваливаться. Судя по вашим картинкам проблем быть не должно, т.к. АЧХ каналов монотонно падают. Для расчета КИХ фильтра надо помимо АЧХ задать ФЧХ. Можно задать линейную ФЧХ и считать КИХ фильтр корректор методом частотной выборки. Разумеется необходимо потом взвесить окном.Я пытался применить для своей задачи алгоритм вычисления коэффициентов методом Ремеза в Matlab, но из-за малого числа допустимых коэффициентов и сложного характера АЧХ (на некоторых участках) это не увенчалось успехом. Я не уверен, что подход аппроксимации к желаемой АЧХ корректора применим здесь. Неравномерность, требуемая в полосе 8-128кГц, составляет ±0.1Дб в полосе 128-256кГц ±1Дб, подавление в полосе заграждения должно быть максимальное исходя из выполнения первых 2х условий.
-
Спасибо, читал эту статью. Такие эквалайзеры будут эффективны при устранении неравномерности в полосе пропускания. В моем случае АЧХ имеет условно равномерный спад к высоким частотам, и применение такого рода коррекции боюсь малоэффективно. Особенно если учесть серьезные ограничения в вычислительной мощности.
-
Здравствуйте форумчане!
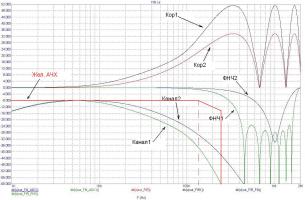
Некоторое время бьюсь над задачей коррекции аналогового сигнала цифровым фильтром КИХ. Столкнулся с рядом трудностей и не до конца понимаю, как подобные задачи решаются. Суть задачи рассчитать коэффициенты КИХ фильтра(ов) для получения желаемой АЧХ из заданной. Скорость выборок входного сигнала ≈500нс (2.048МГц). Количество коэффициентов ограничено: сейчас 14 коэф, возможно при оптимизации кода получится 15-16. На рисунке представляю суть проблемы. Канал1, канал2 - варианты заданной АЧХ. Кор1, Кор2 - ачх корректоров. Сейчас правильно работающую систему я получил при сочетании Канала2, Кор2 и ФНЧ2 (применяется два КИХ фильтра). Вопрос в том, как оперативно и точно рассчитывать все коэф.
-
А по поводу Ваших сомнений, - и да, и нет. Взять к примеру AD797, по даташиту нам говорят что он дает 50нВ п-п в полосе 0,1-10Гц, если еще грубо добавить сюда шумы в полоске 300 Гц (en=1нВ/sqrt(Гц)) выйдет порядка 20нВ эффективного шума. Сам датчик в этой полоске шумит примерно 40нВ эфф. Т.е коэф.шума такого усилителя близок к 1. Все супер...Но. Это учитывая ток потребления ОУ 8мА и пиитании +/-15В. Получить такой же Кш при потреблении усилка 100-200мкА весьма проблематично. А мне это просто необходимо, поскольку датчики должны работать от батареек и как можно дольше.
Тепловой шум прибора ВСП с геофоном GS-20DX можно наблюдать ниже глубин ≈500м. Его величина порядка 50нВ.
По мере подъема к поверхности уровень микросейсм возрастает до величин 2÷20мкВ.
С учетом этого для скважинных измерений нужен датчик с низким уровнем шумов (геофон). А для наблюдений на поверхности будут пригодны и геофон и акселерометр, в совокупности с тривиальным усилителем, имеющим собственный шум порядка 100-200мкВ.
-
Я кстати щас делаю схемку на транзисторах (МШУ) для геофона GS-20dx, коэф.шума будет близким к 1. Правда там другие проблемы потом будут- сеймических шумов выше крыши. Кстати в помещении с геофонами тоже проблема - они хорошо ловят еще и магнитные наводки, хотя это в основном 50Гц и гармоники.
Интересно было бы узнать поподробнее, и с картинками:)
По этому поводу есть вот здесь: http://www.beis.de/Elektronik/LNPreAmp/LNPreAmp.html
Хотя, не совсем ясно, имеет ли смысл делать ультра малошумящие усилители для геофонов при том, что собственный тепловой шум в полосе 10 - 250 Гц составляет порядка 35нВ.
-
Опубликовано · Изменено пользователем ToR_TDA · Пожаловаться
Вообще связка из OP27, OP37 где шумы обоих складываются видится неудачной, да и параметров элементов не дают, такшта...Да, такое схемотехническое решение не совсем понятно, лучших показателей можно было бы достичь, применив, например, один AD797.
-
Нашел анализ шумовых характеристик, интересующих меня акселерометров, вот здесь:
-
Фи!
Вы им испытания для опытной партии делать собираетесь или таки просто использовать сенсор выпускаемый какими-то тиражами и уже имеющий статистику?
В целом, я не думаю, что для ВСП сейчас есть все условия для перехода на иные, нежели геофоны, первичные преобразователи. Но такие попытки, тем не менее, осуществляются. Я пытаюсь рассмотреть некоторые варианты и сравнить их. Например, акселерометр endevco 7703A-1000 был в составе ВСП системы, представленной на World Geothermal Congress 2010. Да, акселерометры проигрывают по шумам геофонам, но при высоких температурах (150ºС) это не так очевидно т.к. эти преобразователи имеют спецификацию для работы при таких температурах.
(Думаю, нужную вам спецификацию еще не придумали)Статья по поводу СВУ-3 была опубликована в "Приборы и системы разведочной геофизики №1(19)/2007", с тех пор прошло некоторое время.
И, прошу заметить, мы отклонились от темы, меня интересует вопрос, как по спецификациям сравнить геофоны и акселерометры.
-
А какие это "некоторые модели акселерометров с характеристиками подходящими для измерения микросейсмических колебаний" ?
Их не так много, перечислю некоторые: model 86 - Endevco, 87-10 - Endevco, SF1500 - Colibrys, и у Wilcoxon есть пару.
Я не утверждаю, что есть акселерометры по параметрам лучше, чем геофоны (для задач сейсмики), мне интереснее узнать способ как их сравнивать в конкретных цифрах. Например, в цифрах пороговой чувствительности. Для датчиков ускорения мы, например, можем широкополосный шум разделить на чувствительность и получим вроде как широкополосную пороговую чувствительность (если такое понятие вообще существует).
Во-первых, полученное значение будет в единицах ускорения, а во-вторых я не уверен, что так вообще можно что-то считать и сравнивать.
есть немного темеAlexashka, спасибо. Пока только не могу найти спецификацию, описанного в статье СВУ-3.
-
Здравствуйте, форумчане!
В аппаратуре ВСП (Вертикального сейсмического профилирования), традиционно применяют электродинамических сейсмоприемники - геофоны, но в последние годы были выпущены некоторые модели акселерометров с характеристиками подходящими для измерения микросейсмических колебаний. Вопрос заключается в том, как сравнить эти виды датчиков. Например, важным параметром является пороговая чувствительность датчика.
Для геофона расчет выглядит так: напряжение теплового шума eш = √4kTRΔf , пороговая чувствительность - Xmin = eш/S [м/сек] , где S - чувствительность геофона. А вот как сравнить пороговые чувствительности по скорости акселерометров и геофонов?
Выход акселерометра ускорение, значит нужно сначала интегрировать, а затем сравнивать. Помогите разобраться.
-
Мне было бы интересно посмотреть, чем вы занимаетесь.
-
Здравствуйте!
Занимаюсь задачей коррекции сигнала. Очень недавно начал разбираться с алгоритмами адаптивной фильтрации, и собрал модель такого фильтра-корректора в матлабе. Хотелось бы проконсультироваться со знающими людьми на счет адекватности применения алгоритма как в моей модели на реальном DSP. Вроде бы вышла вполне работоспособная вещь.
Только мне не нравится пару вещей в ней, например не могу понять, как увеличить раскрытие глаз-диаграммы и снизить влияние шума.
Расскажу о системе подробнее. КИХ фильтр с адаптацией коэффициентов по LMS алгоритму. КИХ фильтр на 4 отвода, квантование входных значений по времени с выборкой 0.5мкс, задержки фильтра 1мкс. Блоки step-step3 устанавливают начальные коэффициенты (нормированы). Решающее устройство по сути 4 компаратора.
Что вы можете по этому поводу посоветовать? (В плане улучшения).
Ссылка на файл simulink: http://ifolder.ru/23178019
-
Нужен не фильтр с предельными параметрами, а коректирующий, с определенными. Причем коррекция делается по тренду, а мелкие неравномерности опускаются. И коррекция нужна с фазой, а не только АЧХ.
Расскажите поподробнее, что вы собственно корректируете. Это какой-то канал связи, для которого известна АЧХ и ФЧХ?
-
Если АЧХ нужно задавать именно по точкам, то в MATLAB есть функция remez, которая синтезирует нерекурсивный дискретный фильтр (FIR). Почитать про нее можно здесь http://matlab.exponenta.ru/signalprocess/book1/3/remez.php
-
Вопрос не о том у кого шея или еще что-то длиннее, а о кодере, например о спектре.
Поправьте, если заблуждаюсь.
Спектр основного лепестка модулированного QAM16 сигнала по ширине составляет 2*Fsymbol при несущей частоте Fsymbol.
При использовании косинусных фильтров в передатчике можно (теоретически) уложить основной лепесток до Fsymbol при несущей частоте 0.5*Fsymbol. На практике, несущую берут 0.6*Fsymbol при верхней частоте 1.2*Fsymbol. Таким обрзом при битовой частоте 500кГц, мы имеем ширину основного лепестка QAM16 порядка 150кГц.
Если посмотреть на спектр, так называемого, кодера 1XYZ_9, то основной лепесток там укладывается в 125кГц.
Значит, все таки, спектр QAM16 шире?
-
При желании основание кодирования можно повысить. Тогда комбинации 1ХУ можно передать 5-ти уровневым сигналом в канале, а комбинации 1ХУZ соотв. 9-ти уровневым сигналом и т. д.
С тремя уровнями более или менее понятно, а как реализуется в вашем варианте 5-ти уровневое кодирование?
-
Тут возникает вопрос, а в чем принципиальное отличие кодирования 2B1T от распространенного 2В1Q?

Корекция АЧХ
в Алгоритмы ЦОС (DSP)
Опубликовано · Пожаловаться
Полностью согласен. Путь по которому пошел я это создание нелинейно фазового корректора. Малым числом коэффициентов мы устраняем большое затухание АЧХ на высоких, если оно равномерно. В этой статье похожая идея.
Adaptive_FIR_Equalizer.pdf