


Stepanov
-
Постов
811 -
Зарегистрирован
-
Посещение
Сообщения, опубликованные Stepanov
-
-
Да, возможно, коллега тогда его купил и оно ему сейчас не нужно, может имеет смысл с ним связаться.
-
Вот же, и не дорого.
-
Del.
Да, надо уточнить какой именно МК и компилятор.
-
19 minutes ago, Quantum1 said:
Мне просто казалось, что в самом C есть стандартные методы для указания условно любому компилятору, про жесткую последовательность действий, без попыток оптимизации.
Разумеется есть, собственно это и достигается управлением режимами работы компилятора. Это необходимый, достаточный и штатный метод решения именно в таких ситуациях. Прям классика.
-
2 minutes ago, VladislavS said:
Чтобы компилятор вообще не менял задуманный код - его надо правильно написать.
Если возникли желание/потребность отключить опитимизацию на участке кода, то вы явно что-то делаете не так.
Ну перестаньте отсебятину утверждать. Есть технология разработки ПО, которая предполагает управление режимами работы компилятора, обязательно для всего проекта (с этим думаю никто не будет спорить), и более детально, т.е. для отдельных файлов и участков кода, в таких случаях как у ТС. И вот вам документ в котором детально описано зачем, когда, и как это делается.
-
Ребята, чего вы такие злобные? )
И таки третий путь есть.
Если я правильно понимаю описанную ситуацию, то по классике это всё делается управлением режимами оптимизации компилятора применением разных "#pragma"
Чтобы компилятор не сильно менял задуманный код, оптимизацию надо, локально, выключить.
Вот в этом документе всё написано
spru514t (compiler optimization).pdf
ЗЫ (если быть точным то C2000 это не ARM процессор)
-
Алюминий с медью можно соединять через оцинкованную шайбу. Если контактная площадка покрыта оловом то к алюминию можно напрямую прикручивать.
https://chipinfo.pro/infos/valid_contacts_metals.shtml
И кстати если батарейный контакт покрыт никелем, то по таблице его прижимать к алюминию - не кузяво.
-
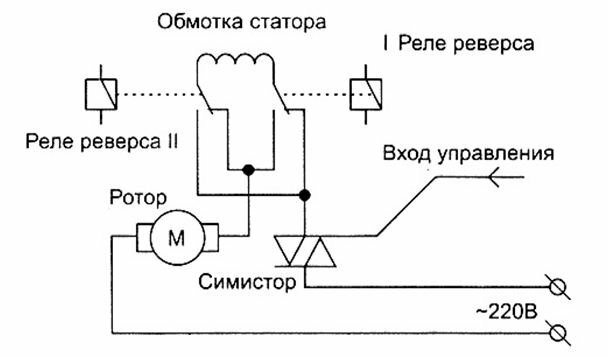
Ну, вот жеж, классика.

И таких схем, называемых "Регулятор оборотов коллекторного двигателя" у китайцев множество по 1..2т.р. к продаже предложено
Вот такой же любительской проект, для киловаттного моторчика.
https://320volt.com/en/230volt-10amper-motor-pwm-hiz-kontrol-igbt/
Симисторные регуляторы хороши были в 70х...80х, когда прекрасных современных дешевых, мощных транзисторов не было. Ну или сейчас когда надо максимально удешевить массовый товар, например те-же дрели, и при этом, как вы верно подметили, не реализована стабилизация оборотов. Хотя стабилизировать и на симисторном фазовом регуляторе можно, но на транзисторном ШИМ регуляторе это получится гораздо более качественно и стабильно реализовать. А разница в цене деталей будет не велика, и совсем незначительно относительно вашего труда по решению этой задачи с мотором.
Не тратьте силы и время на симисторный вариант, сделайте или купите готовый транзисторный ШИМ регулятор, с кратным запасом по току, и будет вам счастье.
Достаточный запас - это пятикратный запас по току у транзистора. Т.е. если мотор реально потребляет 10А - ставьте транзистор на 50А это обеспечит надежность и долговечность, если всё остальные элементы схемы тоже будут правильно выбраны.
-
А с какой точностью надо обороты поддерживать? Не лучше ли сделать схему с нормальным выпрямителем, конденсатором, одним или двумя IGBT транзисторами, и датчиком оборотов? Ничего сложного, а качество движения и управления отличное.
-
А почему бы регулятор от болгарки или дрели не поставить просто? В нём даже переключатель реверса встроен.
-
Напряжения (кроме напряжения звена постоянного тока, т.е. питающего в данном случае) при этом методе не измеряются. И да, измеренное сопротивление это будет суммарное сопротивление всей цепи фазы включая сопротивление двух транзисторов. Но если сопротивление транзисторов и проводников известно (измерено априори например) то его можно вычесть и и получить именно сопротивление обмотки.
-
Извините, не вчитался. Тогда вот труды, прямо во вашему вопросу.
Сначала по скорости нарастания тока измеряют индуктивность, а потом по скорости спада тока (в замкнутой на землю фазе) определяют сопротивление.
Детально и без лишней воды это описано в параграфе "4. Method" стр3 (479) в "A Simple Method for Stator Inductance and Resistance.pdf"
Еще есть метод измерения сопротивления фазы через измерение тока и напряжения на ней, но для этого надо добавить датчики напряжения на фазы.
Stator resistance identification of PMSM.pdf
A Simple Method for Stator Inductance and Resistance.pdf
++++++++++++++
И очень рекомендую вот этот документ по стендовому определению параметров элмашин, тут описана реализация (уже) стандартных мировых методов.
!Automatic Identification of Machine Parameters for Motor Drives.pdf
-
 1
1
-
-
Из контекста следует, что это надо для определения перегрева обмоток.
Однако такие измерения требуют дополнительных элементов на плате, и результат будет весьма условный поскольку одновременно измеряется и сопротивление всяких контактов на проводе, причем эти контакты имеют термоЭДС. Не проще ли термистор в обмотки вклеить?
-
Однако есть не очевидный аспект. Как показывает практика китайская медь не всегда соответствует советский ГОСТ на бескислородную медь М1. И у медной проволоки одного сечения может заметно отличаться (в большую сторону) удельное сопротивление, на несколько процентов.
А по индуктивности - с виду одинаковые моторы могут быть намотаны на разных производствах и с разным числом витков разной проволокой. Но разбирать, чтобы посмотреть, шаговик надо очень аккуратно чтобы внутрь не попал мельчайший магнитный мусор.
-
Спасибо, скорректировал формулировку, ссылки добавил.
-
-
Лень - двигатель прогресса.
-
Ну, вы же сами знаете, что если с кристаллом всё в порядке то после обнуления контрольный пример с UART должен работать, если это не так то вероятно это аппаратная проблема.
-
Однако если всё так то это может быть интересно. Получается что есть элемент памяти изменяющий работу периферии. Что это может быть.
Полное стирание EEPROM/FLASH пробовали?
И такое на разных экземплярах повторяется? Из разных партий?
-
Очевидно, можно попробовать подключить моторчик с достаточной индуктивностью. Вот мотор-колесо от гироскутера хороший объект для отладки.
-
Может деметаллизация (выгорание, разрушение, выходных каскадов), ESD-ЭМС? Китайцы же.
-
В теме высоковольтный источников полезно понимать вот такие моменты
1) Емкость вторичной обмотки переводится на первичную в квадратичной зависимости от коэффициента трансформации. Именно по этому надо всегда стремиться к наименьшему коэффициенту трансформации. Никогда не стоит использовать повышающие трансформаторы с коэффициентом более 50, лучше выбирать в пределах 20. При увеличении коэффициента трансформации КПД очень быстро падает.
2) Умножители напряжения работают эффективнее трансформаторов.
3) импульсные широкополосные повышающие трансформаторы применялись в те времена когда не было мощных компактных транзисторных ключей. многокаскадные схемы обладают линейными основными характеристиками. И стоит при любой возможности применять их а не трансформаторы.
Поэтому, условно, в общем виде оптимальный современный источник того рода о котором тут речь выглядит как повышающий трансформатор питаемый резонансным источником тока работающим на фиксированной частоте чуть ниже резонансной (при превышении резонансной частоты трансформатор теряет свои свойства), питается этот источник регулируемым постоянным напряжением что и позволяет регулировать выходное напряжение в целом.
После трансформатора - умножитель. Есть разные типовые схемы умножителей.
Формирователь выходного сигнала высокого напряжения может быть частью умножителя либо отдельной схемой.
И как ни странно, но в том случае о котором пишет ТС стоит почитать старую литературу с описанием электростатических генераторов, может оказаться что такое всеми забытое механическое устройство окажется для данной задачи компактнее полупроводниковых. Во всяком случае оно точно надежнее, там просто нечему выходить из строя, "просто вращающийся стакан".
-
On 7/7/2022 at 8:50 PM, IKop said:
в таких двигателях не применяют постоянные магниты следовательно нет режима генерации ЭДС, и нет смысла коротить обмотки.
и закороченные обмотки работают только как тормоз, и не провернут двигатель в обратную сторону.
Ну (противо) ЭДС в принципе возникает в любом типе электрической машины, во всех без исключений.
В качестве генератора очень даже эффективно может работать обычный асинхронный двигатель, для этого его надо раскрутить а потом подать небольшо кратковременный ток хотябы на одну обмотку, и начнётся самоподдерживающийся процесс.
Что касается конкретно этого вопроса ТС, то тут схема неполная, в ней отсутствуют два перекидных контакта разворачивающих одну из обмоток (статорную или роторную в купе со щетками) относительно другой. То что оно после срабатывания токовой забиты крутится в обратную сторону есть запрограммированный эффект зарактерный и требуемый для того инструмента в котором этот мотор работает.
Правильная схема такая
-
Ну а осциллографом-то смотрели? Без этого ну никак не обойдется.
Проблема с крутящим моментом шагового двигателя
в Робототехника
Опубликовано · Пожаловаться
Пятифазные шаговые двигатели для Вашей задачи точно не нужны, кроме проблем вы от них ничего не получите.
Пятифазные двигатели сейчас практически нигде не используются, и это связано с развитием и удешевлением драйверов для двухфазных шаговых двигателей. Пятифазные же были решением в тех случаях где требовалась точность движения и более равномерный график момента раньше, в 80е и начале 90х годов, когда драйверы были примитивны.
Сейчас нет готовых массовых дешевых драйверов для пятифазных двигателей, и разработка такого драйвер будет не такой простой задачей.
Для движения по лестницам отлично подходят например привода стеклоподъемников легкового автомобиля - как наиболее дешевый и массовый вариант моторредуктора мощностью около 100Вт и развивающего момент до 50кг*см при скорости вращения порядка 60об/мин. Для управления такими приводами (DC motor) достаточно мостового драйвера массово применяемого моделистами или производящегося для ардуино.