


Xenia
-
Постов
4 848 -
Зарегистрирован
-
Победитель дней
3
Сообщения, опубликованные Xenia
-
-
9 часов назад, dfomin сказал:
Основные сложности в данном эксперименте — это регулярное (ежедневно или лучше несколько раз в день) измерение потока углекислого газа из почвы.
Вам хорошо 🙂 - почва не так уж и много углекислого газа выделяет. А вот у меня тоже научный проект (ИБХ РАН), но задача противоположная - требуется в термостате поддерживать концентрацию CO2 в интервале 1-5%. Ну, а в том термостате кроме нужной температуры еще и лампочка горит и растет какая-то живность, которая на свету эту углекислоту усваивает. Причем автоматизация процесса не требуется - достаточно вручную с помощью редуктора установить нужный поток СО2 из баллона. А проблема у меня как раз в датчике/сенсоре, т.к. на такую высокую концентрацию CO2 добыть датчик чрезвычайно трудно, ибо широким спросом они не пользуются, поскольку такая концентрация СО2 находится далеко за пределами возможностей человека дышать таким воздухом. Поэтому даже сенсоры СО2 для теплиц имеют верхним пределом измерения 5000 ppm, тогда как мне нужно в 10 раз больше.
Лично я видела только один такой датчик (B-530) - здесь:
https://aliexpress.ru/item/1005002080536560.html
но он уже распродан, не смотря на высокую цену. Да и в Россию его не продают.
Поэтому хотела спросить вас, как специалиста, (а также остальных участников этой темы), не встречали ли вы датчиков СО2 на высокие концентрации?
-
1 час назад, dimka76 сказал:
Чего там догадываться? АЦП у НИИЭТ только один.
1273ПВ19Т
Высокоразрядными (сигма-дельта) АЦП я интересуюсь давно, но с ассортиментом отечественных производителей совершенно не знакома. Прежде думала, что 16-разрядных АЦП отечественная промышленность вообще не выпускает.
Но и этот АЦП меня не порадовал, т.к. под мои цели он не подходит, тогда как мне нужна частота преобразования 50 Гц (на этой частоте сетевые наводки/шумы низкие). А потом корпус жуткий - с усами 🙂 .
-
2 часа назад, byRAM сказал:
Микросхема АЦП у НИИЭТ тоже есть, 16-разрядная и очень хорошая.
Назовите пожалуйста название этой микросхемы, т.к. ваших слов недостаточно для того, чтобы об этом догадаться.
-
2 часа назад, jcxz сказал:
Как работает та перепаянная перемычка - без схемы не угадать. Но есть вероятность, что на резистрах подтяжки при каких-то обстоятельствах может появляться напряжение >+3.3V. Она боится не беспочвенно.
Да и даташит на чип I2C-слэйва (с силовой платы) тоже было бы полезно почитать.
Я бы не хотела, чтобы кто-то вместо меня стал заниматься разборкой даташита и руководства к блоку, который я купила, однако ссылки на них дам, если любопытные все-таки найдутся:
https://wiki.iarduino.ru/page/power-key-4p-i2c-datasheet/
https://wiki.iarduino.ru/page/power-key-4p-i2c/
Однако сведений об электрической схеме в них нет, а программирование заточено под Arduino - придают готовую библиотеку и объясняют, как ее функциями пользоваться. Тогда как я в системе Arduino не работаю (и хотя Arduino-платы иногда покупаю, но использую их не по назначению - прошиваю их своей прошивкой, затирая Arduino-загрузчик).
Тем не менее, мне удалось кое-какую полезную информацию извлечь путем осмотра этого изделия снаружи. Во-первых, примечательно, что на нем тоже установлен контроллер из семейства STM32 - на этот раз STM32F030F4P6. Очевидно, что именно он поддерживает I2C со стороны этого устройства. Тем не менее, мне непонятно, как он работает, когда пользователь выбирает вариант с 5-вольтовой подтяжкой шины (этот вариант установлен по умолчанию в заводской поставке, а для перехода на 3.3-вольтовую подтяжкку приходится перепаивать перемычку, которая для такого перехода там предусмотрена). Конечно, эту перемычку я сразу же перепаяла и убедилась вольтметром, что напряжение на линиях I2C снизилось до 3.23V. Именно поэтому мне было странно, как как может "сгорать" I2C-интервейс у моей платы. Во-вторых, на этом изделии тоже стоит LDO, понижающий 5-вольтовое напряжение питания до 3.3V, необходимого для питания микросхемы контроллера. Таким образом ситуация симметричная - оба устройства, соединяемые шиной I2C, питаются от одного и того же источника питания в 5V (по существу это линия питания USB-кабеля), оба имеют в своем составе понижающий напряжение LDO, и оба используют контролеры STM32 (разные, но 5-вольтовая толерантность у них одинаковая). Подтяжка осуществляется со стороны Slave-устройства неизвестным мне образом, хотя среди команд Arduino-библиотеки есть и такая, чтобы отключить эту подтяжку. Т.е. встроенный в это устройство контроллер (STM32F030F4P6) как-то ухитряется не только работать на 5-вольтовой подтяжке, то и включать и выключать эту подтяжку, несмотря на то, что он сам 3.3-вольтовый. Тем не менее, сгорает у меня моя плата, а этому устройству ничего не делается.
Пока же я склоняюсь к банальному объяснению моей проблемы - плохая земля, т.е. ненадежное соединение обоих устройств по общему проводу. При этом внешнее устройство, лишенное общего провода (земли), оказывается подвешенным к потенциалу 5V, который "натекает" практически на все его контакты, в том числе и на шину I2C. Причем не только через резистор подтяжки, но и "снизу", т.к. земляная шина устройства, лишенная связи с землей источника питания, тоже получит потенциал 5V. А затем этот потенциал и пережигает мою плату, у которой земля всегда есть. Т.е. суть в том, что моя плата всегда надёжно получает питание и землю, поскольку USB-разъем втыкается прямо в нее, тогда как внешнее устройство было присоединено к ней на "ардуиновых" проводках, которые могли оказаться не столь надежными.
-
1 минуту назад, jcxz сказал:
Я же выше Вам выдержку из даташита привёл. Где расшифровывается, что понимается под характеристикой "5V tolerant".
А я не поняла из вашей выдержки, какая же это толерантность к 5V, если уже при 4V наступает конец.
-
1 час назад, jcxz сказал:
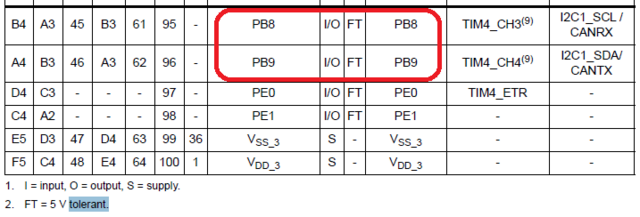
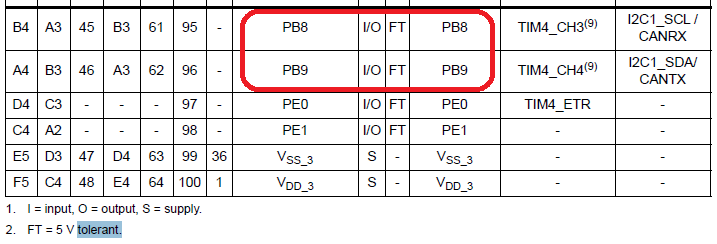
Так как в даташите в параграфе "Absolute maximum ratings" указано:
Мои I2C-пины (PB8 и PB9), согласно даташита, толерантны к 5V (FT):
-
50 минут назад, jcxz сказал:
Делайте подтяжку от +3.3V и ваши ножки будут в целости и сохранности.
Так у меня подтяжка шины I2C как раз 3-вольтовая. И я про это уже писала:
19 часов назад, Xenia сказал:Режим линий у STM32 - Open Drain, напряжение на линиях внешнее +3.23 V, а если закоротить на землю, то получаю ток 0.325 mA. Т.е. ток вроде бы совсем небольшой, чтобы повредить контроллеру.
Тем не менее, подтяжку на шине создаю не я (т.к. мой STM32 этого не умеет), а Save-устройство, питаемое от 5V, а его схема мне неизвестна. Но перемычку с 5V на 3V3 на Slave я перепаяла сразу (это фото из его описания еще до перепайки):
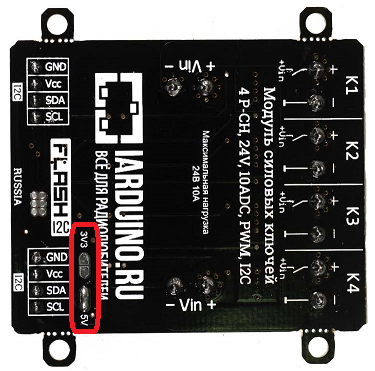
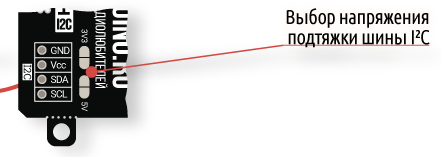
Однако все равно боюсь того, что Slave может на короткое время установить на шине напряжение 5V и лишь позднее снизить его до 3.3V.
-
16 часов назад, Arlleex сказал:
Переведите ноги в режим OUT Open-Drain. И помахайте ногами этими программно. Если работают, то дело явно где-то в коде))
Дело в том, что у меня есть несколько штук одинаковых плат (покупала их у китайцев одним лотом - 5 штук). У двух из них I2C "сгорел", на двух других I2C нормально работает, 5-ю пока никуда не подключала - берегу. Причем прошивка была на всех 4-х платах совершенно одинаковая. Я пишу "сгорел" потому, что на первых невезучих платах I2C сначала тоже работал, но потом перестал работать (пропали испускаемые из платы сигналы). В этой ситуации мне сложно пенять как на свою прошивку, так и на возможную неисправность плат с самого начала. Тем более, что на плате микроконтроллера пины (PB8 и PB9), ответственные за работу I2C, попросту выведены на разъем ("гребенка" по краям платы), и никаких других электронных компонентов по пути не содержит. Slave-устройство использовалось одно и то же, т.к. я его всего в одном экземпляре покупала.
Те две платы, которые до сих пор еще работают с I2C, держатся на плаву благодаря вот такому методу: сперва подаю питание на Master и Slave при разорванной между ними шине I2C, а после тогда как они светодиодиками начали моргать, I2C-шину между ними соединяю. Тогда всё работает каждый раз устойчиво. Тогда как первая плата "сгорела" в момент подачи питания при соединенной шине, а вторая сгорела после того, так я сделала STM32 ресет (кнопочку такую на плате нажала).
-
А тогда еще один вопрос про I2C: бывало ли у кого, чтобы I2C "сгорела"? В смысле того, что напряжения на линиях на холостом ходу нормальное (3.23 V), но STM32 (всё тот же STM32F103C8T6) в режиме мастера никаких сигналов не выдает (логический анализатор на линиях ничего не видит). А то у меня уже вторая плата "подыхает" по этой же причине - I2C "отваливается", хотя в остальном всё вроде бы в порядке.
Плату меняла на другую (точно такую же), после чего примерно сутки работало, а утром при включении снова I2C попало. Режим линий у STM32 - Open Drain, напряжение на линиях внешнее +3.23 V, а если закротить на землю, то получаю ток 0.325 mA. Т.е. ток вроде бы совсем небольшой, чтобы повредить контроллеру.
А началось всё с того, что силовой ключ себе купила, вот такой: https://wiki.iarduino.ru/page/power-key-4p-i2c-datasheet/ , а управление им только через I2C. Силовым напряжением я него не нагружала, а питала от источника 5 V, причем того же самого, из которого LDO на плате делает напряжение 3.3 V для питания этого STM32. Подтяжку на линиях I2C тоже он создает.
-
12 минут назад, EdgeAligned сказал:
У 103-го нет такого режима - выхода OD с подтяжкой.
Благодарствую за ответ! Примерно это я и подозревала, когда увидела, что, несмотря на мои потуги, подтяжка так и не появилась.
-
53 минуты назад, makc сказал:
Внутренняя подтяжка слишком высокоомная, чтобы обеспечить нормальную работу I2C. С другой стороны это может быть немного опасно, если вы подключаете 3.3 В микроконтроллер к 5В I2C. Поэтому мне кажется вы хотите странного.
Я не странного хочу, а хочу увидеть напряжение подтяжки с помощью вольтметра/тестера. У STM32 внутренний резистор подтяжки около 30 К, а потому его должно быть достаточно, чтобы обнаружить это напряжение обычным вольтметром, не требуя применения особо высокоомного. Тогда как у себя я вижу чистый ноль до 2-го знака после десятичной точки. Тем более что подтяжкой на STM32 я и раньше пользовалась, а потому вполне могу судить о том, есть она или нет.
49 минут назад, HardEgor сказал:У вас написано AF_OD - Alternative Open Drain, скорее всего он не дает включить pullup
Когда передачи нет, то потенциал обеих линий (SCL и SDA) высокий. Стало быть, установленный режим Open Drain не может быть в этом виноват. Тем более что даже при наличии передачи по линии I2C среднее напряжение на линиях не только не упадет до нуля, но и не уменьшится более чем вдвое по отношению у напряжению подтяжки на линии.
Между тем, прежде я уже создавала PULLUP-подтяжку на Open Drain и она нормально работала. Только это было на контроллерах STM32F407VET6 и STM32F407ZGT6, а линия то была - MOSI от интерфейса SPI.
/**SPI1 GPIO Configuration
PB3 ------> SPI1_SCK
PB4 ------> SPI1_MISO
PB5 ------> SPI1_MOSI
*/
GPIO_InitStruct.Pin = GPIO_PIN_3|GPIO_PIN_4; // MISO, SCK
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF5_SPI1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_5; // MOSI to open drain!
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // alternate with open drain!
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);И тогда не только напряжение на PB5 было, то и связь на такой подтяжке работала (правда с невысокой скоростью - 1312 КГц) с магнитным датчиком TLE5011.
-
Название этой темы подходящее для моего вопроса, а потому задам свой вопрос здесь. Прошу извинить меня, если такой вопрос кто-то раньше уже задавал и получился на него ответ, т.к. просмотреть поиском все сообщения, касающиеся I2C, невозможно (очень долго пришлось бы искать).
Вопрос мой таков: возможно ли у контроллера STM32F103C8T6 подтянуть обе линии (SCL и SDA) к питанию с помощью механизма PULLUP?
Мой CubeMX (v5.3) не дает это сделать - для этого контроллера установки PULLUP и PULLDOWN вообще нет, а в таблице значится "n/a".
Пыталась установить PULLUP вручную, вот так:
/**I2C1 GPIO Configuration
PB8 ------> I2C1_SCL
PB9 ------> I2C1_SDA
*/
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);Но никакого эффекта это действие не произвело - на обоих линиях вижу низкий уровень.
-
1 час назад, quark сказал:
Не видно - пустое ведро или полное.
Мне очень жаль, что вы так крепко зацепились мыслью за колодезного журавля. В данном случае совершенно не важно, пустое ведро на картинке или полное. Да пусть бы там вообще ведра не было! Суть же не в ведре, а в том что стрела сама поднялась, хотя никакие червячные редукторы к ней свою силу не прилагали. Т.е. моя идея состояла в том, что примитивный противовес мог бы сделать то, что не всякому червячному редуктору по зубам - предельно облегчить работу двигателя за счет уменьшения момента на его валу. Ибо этот момент возникает исключительно из-за несимметричной нагрузки на ось, когда весь вес шлагбаума сосредоточен на одном рычаге (он же - стрела), а противовеса у него нет.
-
13 минут назад, quark сказал:
Даже при полном ведре с водой, всегда был небольшой "перевес" в сторону противовеса.
Так оно и на моей картинке так - разве не видно, что руками до него никто не касается, а ведро висит в воздухе над колодцем?
Но разговор в теме все-таки не про колодезного журавля, а про момент на валу. Тогда как колодезный журавль был упомянут лишь с одной целью - показать роль противовеса для снижения момента на валу. Вот и вопрос темы приобрёл актуальность именно потому, что элекрошлагбаумы эволюционировали из турникетов (которыми изначально были) по пути удлинения и утяжеления стрелы. И если турникет может легко обойтись без противовеса, поскольку у него момент на валу мал, то у более длинных и массивных шлагбаумов это уже нет. Тем более, когда стрела достигла длины 4 метра, как у топикстартера.
-
Я в шлагбаумах не шибко разбираюсь, а потому к моему комментарию прошу отнестись снисходительно, т.е. не как к совету, а как к вопросу.
В старые времена, когда шлагбаумы поднимали руками, у стрелы шлагбаума был с противоположной стороны противовес - компактный тяжелый груз, уравновешивающий крутящий момент на оси. Т.е. шлагбаум в те времена выглядел как несимметричные качели, находящиеся в состоянии близком к равновесию за счет того, что на их коротком конце находился достаточно тяжелый груз. Такой шлагбаум и в самом деле нетрудно было поднять руками, поскольку суммарный момент на оси был близок к нулю. Но если бы противовеса не было, то поднять такой шлагбаум руками было бы столь же трудно, как поднять лежащее на земле дерево, взявшись за его конец. 🙂
Причем это изобретение весьма древнее - даже в деревнях возле колодцев устанавливали сооружение под названием "колодезный журавель", который по существу представлял собой конструкцию, подобную шлагбауму, стрелу которого дополнительно утяжеляло ведро с водой, поднимаемое из колодца:

Именно груз на противоположной стороне стрелы в качестве противовеса облегчал не только подъем тяжелого ведра с водой, но и стрелы, на конце которой это ведро висело.
Но вот появились электромеханические шлагбаумы, где стрелу поднимает электродвигатель и ... про противовес тут же забыли. Мол, своих усилий и рук жалко, а мотор совсем не жалко - пусть себе напрягается. Именно отсюда, на мой взгляд, и растут корни проблемы "момент на валу", т.к. этот момент появился именно из-за того, что противовес исчез.
-
1 час назад, alexvu сказал:
Только непонятно, куда отводится тепло при такой мощности и низком КПД червячного редуктора.
Может быть, это действительно пиковая мощность, а средняя небольшая, до 500 Вт.
Или это редуктор с высоким КПД.
Откуда там может быть много тепла, если это эмулятор кабины самолета, а не центрифуга? 🙂 Такие кульбиты, как в ролике, выполняются только ради эффектной демонстрации, тогда как в реальных ситуациях полный оборот кабины происходит довольно редко. И это относится к большинству фигур высшего пилотажа, которые исполняются разве что на параде.
А вот червячный редуктор я целиком поддерживаю, т.к. он тихий - как мотор зудит слышно, а редуктор на его фоне не слышен. Другое дело планетарный редуктор - он во время работы звякает :).
-
Поделюсь своими мыслями по поводу данных мне советов об электроприводе для авиатренажера. Тем более что раз уж я этот разговор затеяла, то с моей стороны было бы невежливо отмалчиваться. А та моя несговорчивость в отношении даваемых мне советов, которой меня частенько попрекают, происходит не из-за особенностей женского ума 🙂, а обусловлена результатами собственного опыта. Здесь необходимо будет сказать, что настольную модель установки я уже соорудила и софт к ней написала. На начальном этапе настольная модель выглядела предельно просто - она не повторяла авиатренажер в миниатюре, а представляла собой предельно простую конструкцию из двух шаговых двигателей, в которой более мощный мотор (Nema23) вращает на своей оси менее мощный мотор (Nema17), укрепленный под углом 90° в первому. Ну, а на ось малого мотора прикрепила игрушечный самолётик 🙂 .

А вот софт был уже сложнее - надо было вытащить данные из игры (авиасимулятор "DCS World") и на их основе сформировать команды шаговым двигателям. Точнее говоря, не самим двигателям, а электронной плате от 3D-принтера, предназначенной для управления ими (прошивку той платы пришлось модифицировать под свои цели).
Несмотря на примитивность моей конструкции, она смогла ответить на ряд вопросов, ответы на которые чисто умозрительно я бы дать не смогла. Во-первых, коррекция угла была реализована через каждые 100 мс (10 раз в секунду), а на протяжении всего полетного задания (миссии) моторы совершали шаги в среднем в пределах 2-х градусов (больший угол за 100 мс накапливался только при исполнении бочки мотором крена). Если принять во внимание, что двухфазные шаговые двигатели имеют 200 физических шагов на оборот (деление на микрошаги я сейчас не рассматриваю), то "родной" шаг у двигателя составляет 1.8°. Сопоставляя величину этого угла со средним шагом в полете (за 100 мс), обнаруживаем, что шаговые двигатели в реальном полете работают почти исключительно в пошаговом режиме, - либо совершают 1 шаг за такт обновления картинки, либо вообще никак за этот такт не двигаются. В этом и была та причина, по которой я выбрала именно шаговые двигатели - они без труда могут делать одиночные шаги. Тогда как я испытываю сильные опасения по поводу того, что движки постоянного тока с мощность 2-7 КВт смогут так точно дозировать угол. И дело тут не в энкодере, который может быть сколь угодно точным, а в инерции ротора. По моим ощущениям, задача совершения таким двигателем шага в 2° подобна просьбе машинисту товарного железнодорожного состава продвинуть этот состав ровно на 10 см. И хотя положение состава возможно измерить с точностью до миллиметра, а мощность электровоза может быть очень большой, задача малого сдвига при большой массе состава чрезвычайно трудно решаемая, т.к. тут надо те только разогнаться, но и вовремя затормозить. А ПИД-регуляторы с такой задачей не всегда справляются, когда величина шага мала.
Я понимаю, что при использовании редукторов, требования к точности позиционирования угла поворота оси двигателя снижаются. Тем не менее, продолжаю опасаться того, что двигатель будет "проскакивать" заданную позицию, а в ответ на замечание энкодера начнет совершать колебательные движения вокруг заданной точки типа "недолёт-перелёт".
-
 1
1
-
-
Но может быть кто-то поглядит на ролик внимательно (можно с паузами) и определит, что там у них стоит в качестве привода? А то я глядела так и сяк, но чем дольше этим делом занималась, тем большие сомнения меня одолевали...
-
1 час назад, MementoMori сказал:
Мне было 8 лет, я экспериментировал с шестеренками в редукторе игрушечного трактора и, не без помощи отца, понял, что к чему. Так вот у меня тоже тогда родилась шальная мысль, что если взять много-много шестеренок, то с помощью моторчика из этого трактора можно будет запустить самолет. Эх, детство....
Может тогда и мне поможете советом, раз уж о самолете с детства думали. Речь идет о создании авиасимулятора. Например, такого типа:
Вращение вокруг вертикальной оси можно опустить, но две другие - оси крена и тангажа нужны обязательно.
Вопрос в том, чем эту кабину вращать. Лично моё пожелание, чтобы шаговым мотором, т.к. шаговиками управлять я умею еще со времен возни с 3D-принтером, а с другого типа двигателями опыта общения у меня нет. Но вот с моментом на валу у меня тоже проблема. Ориентировочно прикидывала так: 50 кг * 1 м = 50 кг*м = 500 Н*м - уж очень многонько получается.
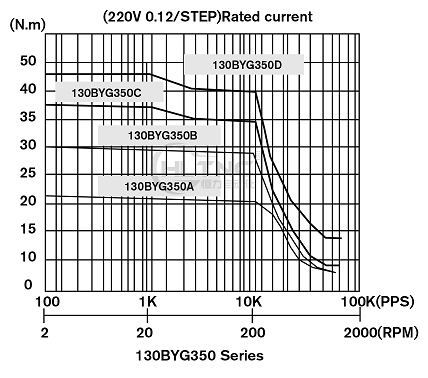
Самые мощные шаговики (продают как китайцы на Aliexpress, так и наши) где-то на 50-60 Н*м (это Nema51). И то они по размеру велики и весят более 20 кг. Тогда как по моему приблизительному расчету крутящий момент должен быть почти на порядок больше. Значит нужен еще редуктор с коэффициентом редукции не менее 10:1. А больше уже нельзя, т.к. тогда самолет не успеет совершить бочку за 1 сек (требование заказчика). Тогда как уже через этот через редуктор мотор вынужден совершить 10 об/сек или 600 об/мин, а при такой скорости вращения тяга у мотора резко падает:
А тут, как назло, в ролике почти совсем не видно мотора, а уж тем более с червячным редуктором. А если и стоит что-то, то совсем маленькое.
Дайте мне кто-нибудь совет, какой движок было бы целесообразно для этих целей использовать.
-
4 часа назад, byRAM сказал:
Мне уже надоело читать доводы сравнения AVR с ARM Cortex на этом форуме

Эти две архитектуры в этой теме действительно сравнивать излишне. Однако досадно, что ST наступает в ту же лужу, что в свое время Atmel - сократив выпуск продукции в период упадка спроса, не смогла его восстановить, когда спрос стал ажиотажным. И как неизбежный результат - бегство покупателей на контроллеры других компаний - конкурирующих фирм. AVR-кам тогда сильно не повезло, поскольку только Atmel их выпускала. Это и явилось (на мой взгляд) причиной упадка популярности этой архитектуры, т.к. разработчики в этой ситуации начали массово мигрировать на контроллеры других архитектур (в основном на ARM и PIC, которые в то время было легче достать).
Ныне подобная ситуация повторяется с контроллерами STM32. Конечно, упадку популярности архитектуры ARM это не грозит, поскольку контроллеры этой архитектуры выпускают не менее десятка других компаний, однако конкретно для STM32 ситуация складывается не лучшим образом - образовавшуюся пустоту на рынке начинают занимать китайские компании, выпуская клоны STM32 с той или иной степенью сходства. И вот тут демпинговать могут уже китайцы, хотя на фоне образовавшегося дефицита это делать им еще рано.
На мой взгляд, бешеный спрос на STM32 (т.к. многие на него успели подсесть) - золотое дно для производителя, когда покупатели ломятся за товаром, несмотря на значительно возросшую цену. В этой ситуации мне совершенно непонятно, отчего ST клювом щелкает вместо того, чтобы наращивать объемы производства бешеными темпами.
-
25 минут назад, Harbinger сказал:
... новые серии (C0xx) - 48 МГц. Последние обещают быть недорогими, но...
Это дауншифтинг среди контроллеров :).
-
17 минут назад, Plain сказал:
По наличию предмета спора в продаже на данный момент, у ST собственное производство либо отсутствует, либо оно загружено чем-то более прибыльным.
В этом вопросе я не компетентна, но с удовольствием выслушала бы сплетни 🙂 про ST - как у нее обстоят дела с производством и отчего бы вдруг его начало лихорадить?
-
1 час назад, byRAM сказал:
Что касаемо STM32,так это классический пример демпинга. Я не очень понимаю, чем они такие мощные? Команды DSP там самые дубовые, даже стареньким TMS а подмётки не годятся.
А что плохого в демпинге? Если удалось сделать свой продукт популярным, тем самым, резко увеличив его тираж и снизив себестоимость производства, то за счет большого объема продаж вполне резонно снижать цену, чтобы не только еще сильнее стимулировать спрос, но и чтобы потеснить в этой нише конкурентов. В лучшие времена цена младших моделей STM32 опускалась ниже доллара. А уже готовая плата с обвязкой на STM32F103C8T6, под названием "Blue Pill" ("голубая таблетка"), продавалась по цене мороженного на палочке :). И потому начала вытеснять собой Arduino, которые к тому времени стоили уже дороже.
STM32 хороши уже тем, что они 32-разрядные и работают на частоте не ниже 72 МГц, в отличие от AVR, которые дотягивают лишь до 16 МГц (редко когда до 20 МГц). Конечно, XMega этот порог чуточку превосходят (у них тактовая частота до 32 МГц), но по цене STM32 с той же производительностью тягаться не могут. Кроме того, у STM32 богатая периферия (в частности есть USB-канал даже у младших моделей).
И наконец, герой этой темы, STM32H743, имеет тактовую частоту аж почти до полугигагерца (480 МГц, но можно разогнать и выше). Сама в то время макетную плату на Aliexpress покупала, вот такую: "Макетная плата STM32H743VIT6" (https://aliexpress.ru/item/4000235276780.html), и стоила она тогда 1609,74 руб.

А что касается демпинга, то кто мешает производителям российской электроники демпинговать? Хотя бы в пределах внутреннего рынка, который невелик. Тем более когда эти производители в основном сидят на бюджетных дотациях. Уж для своих-то государство могло бы сделать скидку.
Или, скажем, пресловутый Эльбрус, от которого даже родной Сбербанк отплёвывается, вполне мог бы стать конкуретноспособным, если бы его продавали по цене процеcсоров Intel или AMD, того же уровня производительности.
-
Вот уже больше 10-ти лет собираю выпуски "Commercial_Newsletter" (EBV), публикующие изменения цен и объемов выпуска электронных компонентов. Впрочем, мне, как модератору FTP, такого рода увлечения довольно свойственны :).
Имеющие доступ на FTP могут ознакомиться с моей коллекцией здесь:
/pub/Journals/EBV Commercial News/
а остальных приглашаю сюда:
Апрельские новости выйти еще не успели (обычно они выходят в районе 10-го числа каждого месяца, за исключением января и августа - последние два номера объединяются с декабрьскими и июльскими номерами, соответственно).
И так, листаем до заголовка "MCU & DSP" и смотрим на ST.
На мой же взгляд, ситуация с ней сильно похожа на ситуацию, в которую когда-то попала компания Atmel, которая во время снижения спроса резко снизила объемы производства и не смогла его оперативно восстановить, когда снижение спроса оказалось гораздо более кратковременным, чем ожидалось. Именно тогда на фоне дефицита AVR-ок компания ST выпустила свои STM8, которые никогда не стали бы популярными 🙂, выпускай Atmel свои AVR-контроллеры в прежних объемах.

Cистема измерения CO2 на микроконтроллерах
в В помощь начинающему
Опубликовано · Пожаловаться
Несомненно автоматизацию поддержания концентрации СО2 в термостате было бы несложно организовать, т.к. достать клапан для регулировки подачи газа нет проблем - таких в продаже очень много. А потому у меня острая проблема именно в сенсоре/датчике, т.к. без него определить концентрацию СО2 на глазок невозможно.
Раньше я думала, что высокие концентрации измерять легче, чем малые, но в действительности всё оказалось иначе - при высокой концентрации СО2 УФ-датчик слепнет, т.к. все высокие концентрации кажутся ему на просвет одинаково черными. Кстати, именно по этой причине на Венере так жарко - углекислота очень сильно поглощает инфракрасные/тепловые лучи, тогда как в атмосфере Венеры очень много СО2 (96.5%). Тогда как именно по УФ-поглощению СО2 в ультрафиолете его концентрация надежнее всего определяется в любой газовой смеси.