

amaora
-
Постов
782 -
Зарегистрирован
-
Посещение
-
Победитель дней
3
Сообщения, опубликованные amaora
-
-
12 hours ago, dinam said:
Эти конденсаторы практически не снижают время включения и выключения MOSFET.
На том экземпляре переключение транзисторов очень медленное. У себя я раньше проводил эксперименты с добавлением ёмкости, замедление было.
12 hours ago, dinam said:... подбором транзистора MOSFET или подбором к нему диода Шоттки.
Зачем и куда Шоттки?
2 hours ago, Plain said:Подобные "перенапряжения" и "колебательные процессы" у народа возникают из-за отсутствия силовых конденсаторов, как в примере разводки из первого сообщения темы, и от такого транзисторы вообще-то сразу подыхают.
Перенапряжение на выходном терминале, середина полумоста. На питании все гладко, конденсаторов хватает, пробовал разные варианты.
2 hours ago, Plain said:Во-вторых, Вы же сами почему-то выбрали несинхронный драйвер затворов, т.е. минимизацию мёртвого времени собственными силами, потому что именно от него прямо зависит заряд паразитных диодов, а теперь жалуетесь.
Начиная с некоторой величины увеличивать мёртвое время смыла уже нет, ничего не изменится, только искажения модуляции. При уменьшении будет порог на котором появляется сквозной ток и повышенное потребление при нулевом токе нагрузки. А выбросы перенапряжения не сильно изменяются при этом.
2 hours ago, Arlleex said:А откуда будет перенапряжение? Ключи выбраны впритык или индуктивные выбросы существенно выше предельных паспортных?
2 hours ago, HardEgor said:Индуктивность дорожек от ключа до конденсатора плюса питания и общего.
Питание подводят полигоны в нескольких слоях, конденсаторы чуть выше. Были варианты с керамическими конденсаторами на обратной стороне под транзисторами, отказался, не дают полезного эффекта, и затрудняют теплосъём. Вариант с двумя транзисторами параллельно будет иметь ещё большие паразитные индуктивности в силовой цепи.
-
1 hour ago, Plain said:
Оба транзистора одинаково подвержены
Да, указал верхний для упрощения описания.
1 hour ago, Plain said:поэтому их драйверам и нужен запас, даваемый отрицательным питанием, и возможно дополнительным отсутствием резистора.
Все таки предлагаю разделять два случая:
1) Нарушение управления транзистором в следствии отклонения напряжения на затворе через ёмкостные связи на сток или исток. Может проявляться на одном транзисторе при его переключении, либо при переключении противоположного, важно dU/dt. Здесь запас в отрицательную сторону и возможности драйвера по току решают проблему.
2) Перенапряжение сток-исток из-за колебательного процесса перезаряда ёмкостей сквозным током. Демпфирование этого процесса будет связано с замедлением переключения каким либо путём. Как-то "отключить" эти ёмкости транзисторов нельзя, шунтирование внешним диодом не поможет. Внутренни диод все равно будет открываться и закрываться вместе с транзистором. Иногда могут образоваться условия для мягкого перезаряда Qrr, в зависимости от знака и величины тока нагрузки во время когда оба транзистора закрыты, в общем случае этого обеспечить нельзя.
Мне нужно замедление для второго случая.
-
1 minute ago, Plain said:
Повторю, не только, а в первую очередь мощнее драйвером и с двуполярным питанием.
Не понимаю, я же про выброс на исток-сток говорил. Мощнее драйвер быстрее откроет верхний транзистор, увеличится бросок сквозного тока через ёмкость исток-сток нижнего транзистора, увеличится выброс перенапряжения на исток-сток.
-
On 6/19/2023 at 7:11 AM, Plain said:
Поздновато рассматриваете. С однополярным, и без запаса, питанием диодные ограничители не сделать.
Даже с двухполярным питанием не очень понимаю как сделать ограничение сохранив при этом низкое выходное сопротивление в обе стороны. А что запасов по напряжению нет на падение на ограничителе при большом токе это да.
Что-то активное защёлкивающееся в состоянии перегрузки с отключением входа, слишком сложно и быстродействия не хватит.
-
On 6/17/2023 at 5:47 PM, Plain said:
Нет, лучше двуполярное питание драйверов, и помощнее собственно они, а если надо снизить скорость переключения, но эффективно, то это существенно сложнее схема.
Эффективно по потерям энергии? Дополнительные 0.5 Вт в затворных цепях не имею значения при общих потерях >20 Вт.
12 hours ago, dinam said:Я применяю конденсаторы между затвором и истоком в схемах с драйверами управления ШД, например, TMC5160A. Только с помощью этого конденсатора удаётся не меняя длительность фронтов спада и нарастания избавиться от сквозного тока. Который возникает от быстрого нарастания напряжения на стоке у закрытого транзистора. Номинал подбираю, моделируя в LTspice. Этот конденсатор приходится использовать, только для некоторых МОSFET, у которых соотношение емкостей затвор-сток и затвор-исток, такое что, при максимальном напряжении питания транзистор открывается.
Это обратная связь через Cgd, комбинация параметров: выходное сопротивление драйвера + Rg, ёмкость Cgd, пороговое напряжение открытия, величина dU/dt. Но вопрос не об этом.
9 hours ago, AlexOr said:Такой конденсатор иногда дает возбуждение транзистора на частотах 30-100 МГц в момент этого плавного переключения. Нужно ставить резистор 5-20 Ом последовательно с конденсатором.
Но тогда он и замедлять переключение перестанет.
Пока не видел колебаний в затворных цепях, с этими драйверами, транзисторами, трассировкой. Есть выбросы на выходном терминале, которые видимо вызваны сквозным током перезаряда Qrr у закрытого транзистора и повлиять на это можно только замедлением.
-
6 minutes ago, cybersonner said:
По входам- классический входной резистор + два диода на оба питания.
Да, резисторы уже есть как часть схемы диф. усилителя, диоды есть в ОУ (надеюсь на это). Добавлю ещё конденсаторы в обратную связь, чтобы не проходили ВЧ.
7 minutes ago, cybersonner said:По выходу вообще жуть (оказывается "AD8531/AD8532/AD8534 do not have any internal short-circuit protection circuitry"+ посмотреть на рисунок 37 в датащите)
Да, это тоже дорисую, но поможет только от КЗ в пределах питания. Проблема, что делать если КЗ с потенциалом до 110в. Мне известно лишь одно решение, добавить ограничители напряжения на выходы ОУ и плавкие предохранители. Посчитать, что все будет успешно срабатывать когда надо, и не будет когда не надо. Потом проверить как ёмкость ограничителя будет влиять на ОУ, возможно добавить компенсацию этой емкости.
9 minutes ago, cybersonner said:защищаться конструктивно: на устройстве поставить разъем, в котором нет опасных напряжений и в который нельзя засунуть что-то не то и не так.
Перетёрлись провода, повредилась изоляция, попала вода в нагрузку, и т.д.
-
Как будет выполнена прокладка проводов и изоляция это вне моей области. Я лишь рассматриваю варианты повышения безопасности в случае если КЗ уже произошло. В любом случае одного первого эшелона защиты будет мало.
-
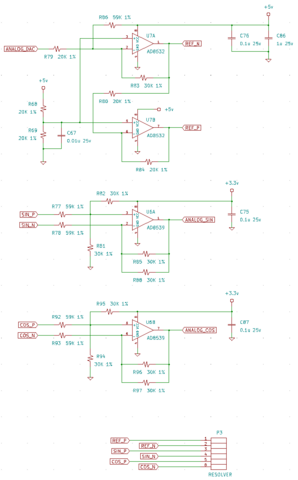
Интерфейс между ЦАП/АЦП и ресолвером. Рассматриваю варианты защиты линий от КЗ между собой и на потенциал ~100в, точнее там ШИМ от -10в до 110в, нарастание ~300нс. По входам наверно достаточно будет добавить НЧ фильтрацию. А по выходам REF_P/REF_N не знаю как.
1) Ограничители напряжения и плавкие предохранители, нужен ремонт после срабатывания, плохо;
2) ??
-
Опубликовано · Изменено пользователем amaora · Пожаловаться
Да, в этом и вопрос, я нахожу упоминания такого конденсатора Cg только в качестве одного из вариантов устранения эффекта Миллера. Но можно же и переходный процесс затянуть таким способом. Это лучше чем только лишь увеличивать Rg, что может в итоге привести к проявлению эффекта Миллера раньше, чем будет достигнут желаемый результат.
У меня так и получалось, увеличивал Rg, чтобы устранить перенапряжения при переключении, но начинал проявляется эффект от ёмкости Cgd и драйвер переставал удерживать затвор в требуемом состоянии.
-
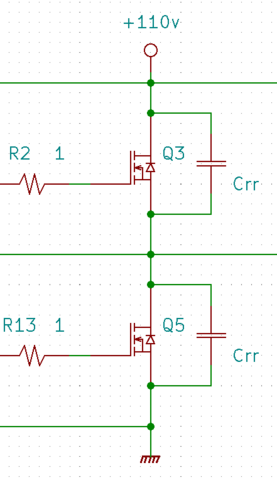
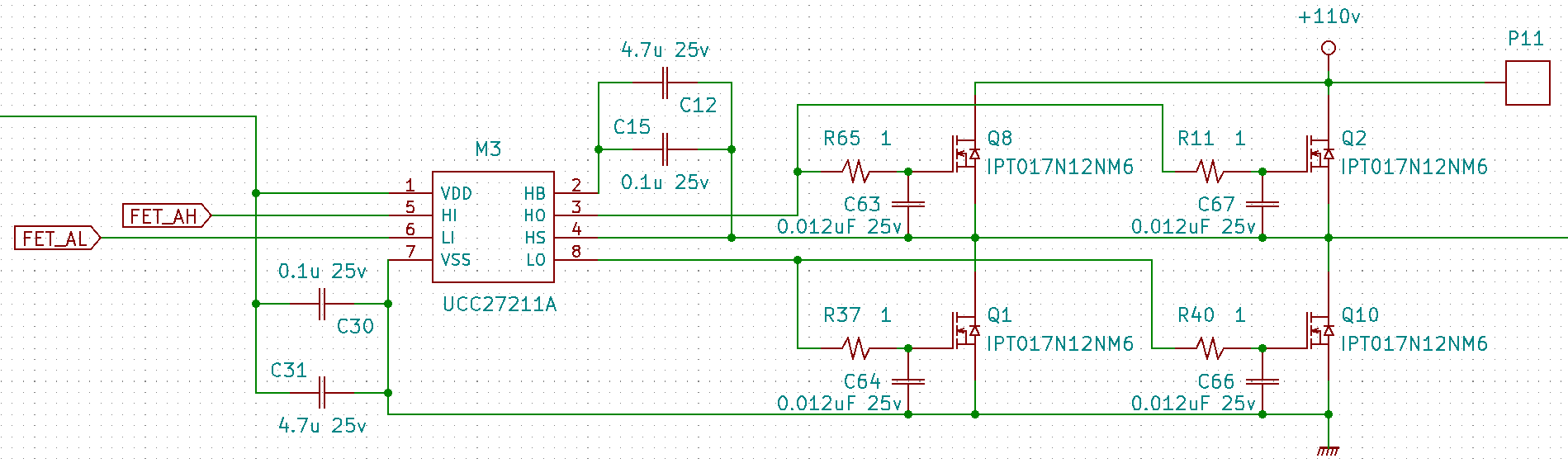
Увидел в одном дешёвом BLDC контроллере использование конденсатора, включённого между затвором и истоком, для замедления переключения силовых транзисторов. В литературе по теме управления MOSFET/IGBT такое встречается редко. Из своего опыта, мне это кажется интересным способом управления временем переключения, хочу попробовать. Недостатки очевидны, но все же непонятно, почему редко так делают.
1) Просто реализовать, один дополнительный компонент;
2) Не увеличивает выходной импеданс драйвера, то есть не мешает ему держать напряжение на затвор-исток при высоких du/dt на затвор-сток;
3) Нагружает драйвер бесполезной ёмкостью, увеличиваются потери;
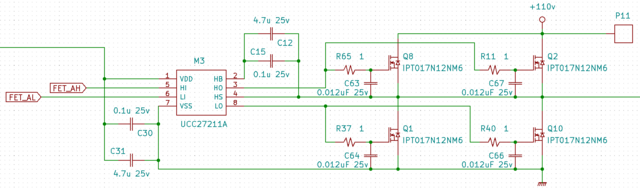
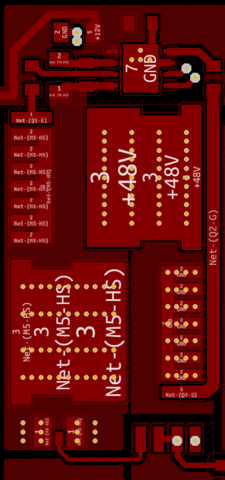
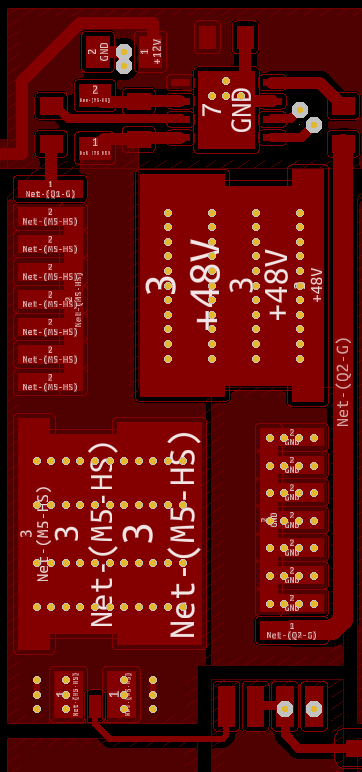
Для большей определённости, фрагмент предполагаемой схемы и имеющейся трассировки в которой была необходимость замедлить переключение (пришлось уменьшить питание с 12в до ~10.5в).
-
Опубликовано · Изменено пользователем amaora · Пожаловаться
Можно вместо голых указателей использовать чуть более сложные объекты для доступа к выделенной памяти. Так, чтобы куча знала где лежат ссылки на ее объекты. Это позволит делать дефрагментацию без mmu. На C++ наверно кто-то так делает, но это сложно.
Другой вариант. Использовать блоки фиксированного размера, и на них строить все необходимые структуры данных, например списки из блоков. Так можно и на C, но метод несовместим со старым и сторонним кодом который работает с большими кусками памяти.
-
Синхронно с ШИМ в удобный момент.
-
#define Func2(...) do { const Data t = __VA_ARGS__; Func(&t); } while (0) typedef struct { int A; int B; float C; } Data; void Func(Data *d) { printf("%i %i %f\n", d->A, d->B, d->C); } int main() { Func2({3,4,6.7}); } -
9 minutes ago, RobFPGA said:
- "котиков" которые будут нравится ИИ ...
А вот это уже опасно.
-
28 minutes ago, whale said:
Я так понял что нейросеть это просто матрица всех состояний системы, обучая мы подбираем коэфф матрицы так чтобы умножая входную матрицу на матрицу нейросети получим необходимый отклик на выходе.
Последовательность умножений на весовые матрицы, а после каждого умножения может быть нелинейная функция.
\(v_{out} = ... f(b_2 + W_2 f(b_1 + W_1 v_{in}))\)
-
Опубликовано · Изменено пользователем amaora · Пожаловаться
On 4/24/2023 at 10:14 AM, whale said:Вот например нужен нейроный регулятор, если вход >0 вкл 1 выход, если <0 второй, если =0 все вых отк,
Для таких простых регуляторов есть теория управления, которая даёт результат гарантированного качества. Нейронный регулятор имеет смысл при управлении сложной нелинейной системой уровня шагающего робота. Можно конечно закрыть глаза и сделать вид, что ничего не знать не хочу, пусть регулятор сам учится, но тогда решение получится избыточно сложное.
1) Если исходные данные представлены в виде пар вход->выход (например можно прокатиться на управляемой системе с другом регулятором). Выбираем структуру сети, так чтобы она была достаточно сложной для аппроксимации зависимостей выходов от входов, но не слишком сложной, чтобы не происходило простого запоминания всех обучающих примеров. Обучаем известными методами: обратное распространение, линейная регрессия.
2) Если исходные данные представлены так же в виде вход->выход но теперь мы не считаем эти выходы эталоном, вместо этого добавляем оценку качества регулирования, оценка даётся для длинной временной последовательности (для эпизода). Стартуем с неким неоптимальным регулятором (например синтезированным по п.1), добавляем в управление случайным элемент и набираем много данных (эпизодов). Получаем уже данные в виде массива {набор пар вход-выход для всего эпизода}->{оценка качества}, исходя из этого рассчитываем например градиент коэффициентов регулятора по оценке качества, двигаем параметры по градиенту. Проводим с новым регулятором следующую серию испытаний и собираем данные эпизодов. Повторяем итерации до достижения необходимого качества.
3) Бывает, что есть только входы. Такую задачу может иметь смысл рассмотреть как часть п.1,п.2 в качестве предварительной обработки данных в случае большого количества входов. Несколько слоёв автоэнкодера или алгоритмы кластеризации. Это называют извлечением особенностей из исходных данных, так в глубоких сетях при работе с изображениями получается сопоставить изображение его текстовому описанию, например. В результате регулятору будет проще работать с этими сжатыми абстрактными особенностями, чем с сырым массивом данных.
-
Есть и достаточно простые нейросети, которые даже обучать можно на мк. Нелинейный вариант FIR можно натренировать извлекать полезный сигнал, запоминать форму искажений для компенсации, наблюдатель состояния. Можно и IIR, но я пока не понял как их обучать. Делаю все на своей коленке, без python нейро-фреймворков.
Нужно много данных, то есть либо готовых примеров вход-выход, либо если есть только входы то нужны еще и критерии качества выходов и еще больше данных и времени обучения.
Это для задач, где обычное решение, синтезированное человеком не представляется возможным, неизвестна модель системы, слишком сложно и т.д.
-
 1
1
-
-
Опубликовано · Изменено пользователем amaora · Пожаловаться
Для исследования методов управления нужен трехфазный синхронный реактивный электродвигатель (СРД) с железом на роторе предназначенный для векторного управления. Такие двигатели называются SynRM и IPM. Главное, чтобы была сильная зависимость индуктивности обмоток статора от положения ротора, можно без магнитов в роторе, можно гибридный. Номинальные параметры какие примерно хотелось бы: мощность от 1 до 4 кВт; электрическая скорость до 100 т.об./мин.; напряжение питания от 24 до 48 в; вес до 6 кг. Вентильный SRM с отдельными обмотками и предназначенный для импульсного управления не подходит.
Существуют такие?
-
Я так сопротивление измеряю, по разности падения напряжения на двух значениях тока. Для исключения аддитивной погрешности.
-
1 hour ago, khlenar said:
Это предполагается частотный привод.Так, что он постоянно в слежении и на входе постоянно меняется задание.
Самым удобным тогда будет работать во вращающейся системе координат. Здесь кратко не рассказать, читайте литературу по приводу. Ваше решение действительно выглядит как "состряпать".
-
3 hours ago, _pv said:
при повороте там ошибка будет копиться и за стабильностью приглядывать надо.
Да, нормировать надо (можно приближенно). Но это будет удобнее для управления фазой/амплитудой.
-
48 minutes ago, khlenar said:
У меня 3 такие формулы рассчитываются за 12мкс.
Ужасно много для такой задачи, на f407 это около 1k fp операций умножения/сложения.
Делали бы с помощью поворота вектора, и не нужны ни тригонометрический функции ни таблицы.
-
On 2/24/2023 at 3:29 PM, khach said:
А вот скорость включения- выключения обычно регулируем затворными резисторами, которые разные.
А бывает такое, что с большим резистором драйвер не может удержать транзистор выключенным при высоком dU/dT.
-
Включение/ выключение нагрузки 3-4kW (80V) полевиком?
в Компоненты Силовой Электроники - Parts for Power Supply Design
Опубликовано · Изменено пользователем amaora · Пожаловаться
On 2/24/2023 at 1:53 PM, Aner said:Затворная емкость этого тр. ~ 4нФ. Ток=50А, напр.= 80В. Нагрузка резистор 1.6 Ом. Как получить спад фронта ~ 1..2 мкс?
Предположим сопротивление в цепи затвора 5 Ом (~2А драйвер), возьмём оценку по 3 постоянным времени RC-цепи, получается,
4 (нФ) * 5 (Ом) * 3 = 60 (нс).
В итоге обычно проблема в том, что слишком быстро, а не слишком медленно.


Защита усилителей от КЗ
в Схемотехника
Опубликовано · Пожаловаться
Нужно около 100 мА в работе.
Не больше 1м или даже 0.5м, нагрузка и датчики в одном конце, контроллер в другом.
Всем спасибо, но переусложнять тоже не хочется, пока вот это обдумаю. На второй ОУ не смотрите, поленился ему диоды и плавкий резистор дорисовать. Не к реализации, а только на анализ схема.