virtuality
Свой-
Постов
83 -
Зарегистрирован
-
Посещение
Весь контент virtuality
-
Микросхема mc33199 разработана исключительно для схем K-Line. Микросхема MAX232 - искючительно для интерфейса RS232. Что может быть лучше?
-
Спасибо!
-
Не жалко и 10. Подскажите, хоть примерно, диапазон, из которого выбирать сопротивления.
-
MAX232 и светодиоды на его выходах
virtuality опубликовал тема в В помощь начинающему
Вот схемка в аттаче. Хочу между добавить светодиодные индикаторы работы. Думается их нужно поставить между MAX232 и MC33199 - RxD и TxD на схеме. МОжно ли подключать диод напрямую - к выводу и на землю, не повлияет ли это на работу схемы. Диод не знаю какой, но жрет он 30 мА.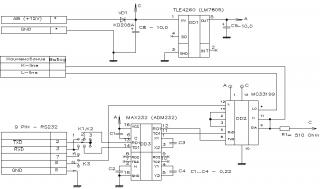
-
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Админы, простите..... Черчиль!!! Ты и такие как ты уже заебали!!!! Неужели сложно прочитать выше ответ на ваш вопрос??? Вопрос тех людей, которые только и умеют, что вальяжно отсылать читать мануалы, не задумываясь о том, что человек хоть и новичок, но столкнулся с нестандартной проблемой, в мануалах которая не описана. А по теме - пришли два чипа сегодня - я их с закрытыми галазми вставил, запрограммировал, перепробовал все варианты тактирования - все работает. Что самое интересное, мега32 на 16 МГц при 3 вольтах питания, да еще и при обоих вариантах CKOPT работает как часы. До чего чипы качественные! Так что проблема оказалась в битом чипе, а с толку меня сбило заключение "эксперта". -
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Попробую с низкой частотой, может получится. Кварц и припаивал и отпаивал все одно. С RESET все нормально. -
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Еханый бабай, дане врал я. Похоже никто не читает то что я пишу, а просто пробегает глазами.... Все я прочитал, все попробовалнарабочей меге16. Увидев фразу "вспомнить фьюзы" я решил что есть способ установить их в дефолтное состояние типа как в БИОСе компа - чип сам ставит безопасные стандартные установки. Если эе это делать самому, то я и так их помню, кроме того, как сказал defunct, все есть в мануалах. Но черт, возьми, поймет ли кто-нибудь наконец, что проаграмматор не видит микросхему!!! Такое бывает если фьзы зашиты на внешнее тактирование при отсутствии такового. ОДнако я подаю XTAL на микросхему - безрезультатно. Правильность своих действий, степень зания мной мануала я проверяю проведением аналогичных операций с мега16. Как я уже сказал выше - повторюсь - все сходитс к тому, что микросхема неисправна. Но ведь Москва считает, что все ОК.... Простите за вопрос, но в этом случае все фьюзы обнулятся, или установятся значения по умолчанию? Что я собственно уже и сделал - заказаол чипы. Будет весело если и они не заработают. -
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Блин, да как их вспомнить эти фьюзы? Как его обнулить? -
DS18B20 + WinAVR
virtuality ответил CyberNik тема в AVR
Может у вас ошибка не в съеме информации с датчика, а в передаче ее? Я так понял вы через UART передаете? -
Да это я уже продумал, и даже более детально. Меня беспокоит мощность такого робота. Я видел в интернете роботов на сервомашинках. У одной машинки усилие около 3 кг. Мне столько не надо, я кататься на нем не собираюсь ))) Если робот весит 200 гр, я думаю, 3 одновременно стоящие ноги... по 66, плюс запас для бодрости... ну хоть 100 грамм тяги даст соленоид вышеуказанных размеров при качественном исполнении? И еще.... Если вы представляете себе механику ноги "паука", то перенос ноги будет осуществлять один соленоид, а поднятие ноги или удержание корпуса над землей - другой. Попался мне раз винчестер битый... Там в системе позиционирования головки есть катушка простенькая - витков на 100, и магнит - не знаю, что это за магнит, но тяга получается внушительная, без сердечника, просто магнит и обмотка.... именно тогда я впервые подумал о том, что соленоид может что-то вытянуть. Правда в винчестере в этой системе принцип вращения и отталкивания... Я к тому и завел весь этот разговор - стоит ли браться за дело, если мне не нужна большая мощьность робота, если я хочу 200 гр поднять тремя соленоидами, диаметром не более 1 см - получится ли?
-
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Я б запрограммировал. Микросхема не отвечает. Can't resync. Я даже попробовал из-под ДОС 5-ю проводками. Не получается. Микросхема в коме. -
DS18B20 + WinAVR
virtuality ответил CyberNik тема в AVR
Николай, советую проверить работоспособность датчика на готовом примере в CodeVision. Если и там у вас ничего работать не будет - значит проблема железе. -
Разъясните мне эту китайскуй грамоту, пожалуйста... Хм.... можно тогда не гайку а линейку с зубцами... Короче надо подумать. А идея с соленоидами привлекательна... Много аналогий с человеческой мышцей. Там если вам интересно тоже разнотипные мышечные фибриллы втягиваются друг в друга. Соленоид может мгновенно "расслабиться". КРоме того, представьте себе задачу - с определенной скоростью опускать груз некоего, неизвестного заранее веса. Я слабо себе представляю такое на моторчиках с проскальзывающими гайками. А если робота заставить спрыгивать с небольшой высоты - амортизировать приземление как он будет? Колян, как опытный робототехник, объясните мне. Простите, выражсь по-простонародному - навскидку - какой максимальной тяги можно добиться от соленоида, пусть идеально сконстуированного, если размеры его огранициваются длиной 2 см, диаметром 1 см. Спасибо.
-
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Значит так... я думал проблема у меня с матчастью оказалось нет. Почитал я Даташит, перепробовал все варианты тактирования - внешнее, кварцевое, от внутреннего РЦ-генератора, все получается. Я делал отладочную плату с микроконтроллером "неработоспособной", включав внешнюю синхронизацию, после чего МК не программровался, выводил его из комы путем подачи XTAL, в общем разобрался достаточно для того, чтобы вы меня не отсылали к мануалам. Так вот, все вышеописанное я проделал с MEGA16. Все получалось. ОДнако MEGA32 упорно не видится AVREAL.' Пишет, что мол, проверьте питание, микросхема не отвечает. Я понимаю, что всех уже достал, но, по логике вещей микросхема как будто бы неисправна. А экспертиза утверждает, что с ней все ОК. Я не прошу вас разбираться с моей проблемой, просто я надеюсь, что может кто-нибудь вспомнит какую-нибудь изюминку или собственные грабли, мне кажется что ответ лежит где-то в глубине.... P.S. кстати, луна сейчас в той же фазе, в которой она была когда 4 недели назад я обнаружил неисправность в микросхеме и сдал ее по гарантии....))))))))))) А экспертиза проводилась где-то в середине цикла.... )))))) Случайно нет здесь на форуме московских представителей Platan'a, где я эту микросхему заказывал и куда ее потом отвозили ))))) -
Короче, вы профессионпалы будете смеяться над любителем-робототезником, но задача такая - есть шагающий робот-шестиног. Приводится в движение он мини-актуаторами - моторчик от вибры сотового на вал цепляется винт с резьбой, а тяга цепляется к гайке, накрученной на винт. Все-бы хорошо, но хочется сделать передвижение робота более интеллектуальным. А вышеописанный механизм лишен возможности к пассивным движениям (что кстати делает его ломким при внешних воздействиях на "ноги"), кроме того сложно контроллироватть силу и невозможна "работа на удержание". Вот и подумываю, как бы все сделать на соленоидах. А габариты такой "мышцы" для ноги я уже описал выше - цилиндр 2х0,8 см, ход тяги - 1 см. Какая должна быть тяга? Да максимально возможная при габаритх катушки, способной уместиться в вышеуказанный корпус. Вот тут кто-то писал про 5Н- меня устроит. Надеюсь все тенические моменты моей задачи ясны. На мой вопрос так и не ответили - будет ли сила выше, если сердечник намагнитить, или сделать его самого катушкой, втягивающейся в другую катушку,
-
Ок, поищу. А по теме - сердечник железный, ход сердечника - 1 см, сила желательно постоянная, однако если ето сопряжено со снижением мощности, то не обязательно. Кстати, если применять магнит, мощность увеличится? По крайней мере плюс будет в том, что можно будет двигать сердечник в обе стороны. А нельзя ли какую-нибудь картинку поясняющую...
-
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
Ребята! Может быть я слишком много написал и вы мысли не уловили? Сконцентрирую. 1. Купленная мега32 работает при первом же подключениина 16 МГц без всяких проблем. 2. Через неделю перестает шиться: два варианта - полетела микросхема или неисправна отладочнаа плата (конденсаторы, кварц) 3. Вставляется Mega16 которая преркасно работает при любых вариантах, работает на 17 МГц даже при 3 вольах питания. Даже в моих ламерских руках, безо всяких там рассуждений о режимах работы кварца, помехах, и фазах луны. 4. Пришедшая из Москвы мега32, находившаяся в ремонте, со слов "эксперта" - полностью исправна. Соотнесите все это. У меня не укладывается... -
И какой же все-таки оптимум соотношения наружного и внутреннего (то есть наружного диаметра сердечника) диаметров катушки?
-
Ламерский вопрос - а сердечник в такой катушке нужен? Или металлический "поршень" сам будет втягиваться в медную обмотку? На сколько процентов длины он изначально должен быть в катушке, чтобы сразу развивалась максимальная тяга? То есть я был не прав если думал что при одинаковой площади сечения всех витков катушки тяга будет больше там, где витков больше?
-
Доброго времени суток! Задача стоит интересная. Нужно сделать маломощный линейный привод соленоидного типа. Под катушку дан цилиндрический корпус диаметром 0,8 см (считай - наружный диаметр катушки - она внутри корпуса будет), длиной 2 см. Ход "поршня" должен быть не менее 1 см. Напряжение планируется 12 вольт. Возникает вполне понятное желание получить при минимальных размерах макисмальную тягу. Я человек без высшего технического образования, но из курса школы помню, что чем больше витков, чем больше сила тока, тем лучше. Возникают вопросы о конструкции катушки, которые приводят к дилеме: -чем больше витков - тем больше длина провода а соответствено выше сопротивление и ниже сила тока; -чем больше витков хочется уместить в одном и том же объеме, тем тоньше провод и больше его сопротивление и ниже сила тока. Как это все свести к макисмальному КПД. Искал литературу в интернете на эту тему - мало что интересного. ПОскольку экспериментировать не хочется, может быть кто-то посоветует как рассчитать. Хотя если честно, дело наверное не в рассчетах, меня интересует не цифра обозначающая тягу, а принципы при которых тяга буте максимальной, компромисс между сечением провода, количеством витков и подаваемым током и напряжением.
-
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
defunct, есть правда в ваших словах, однако я не профессиональный разработчик, а любитель. 300 руб стоит микросхема, 3 штуки покупать, да еще и программатор - накладно. -
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
На RC генераторе чип работает. Попробую покорячиться с CKOPT -
ATMega16 vs ATMega32
virtuality ответил virtuality тема в AVR
брр... Это вы о чем? CKSEL 1 - это не 16 МГц или я чего-то не догоняю... По какому из фьюзов вы поняли, что включена внешняя синхронизация? Кстати на то похоже... Потому как контроллер без спроса "жрет" синхроимпульсы если их подать на XTAL1. И, насколько я знаю, внешняя синхронизация это CKSEL =0000 -
ATMega16 vs ATMega32
virtuality опубликовал тема в AVR
Собрал я отладочную платку под ATmega32. Включил, прошил - работает. Шью через Avreal. Через неделю перестала читаться и шиться без внешнего тактирования - только при подаче на XTAL1 соответствующего сигнала с программатора. В противном случае Avreal сообщает, что микросхема не отвечает. ОТнес я ее обратно продавцу - отправили на экспертизу в Москву попросив зайти через 2 недели. ЧТобы не было скучно я купил Mega16 - она отличается только объхемом памяти - распиновка такая же. На всякий случай проверил монтаж на плате, не понравилась мне пайка в зоне кварца и конденсаторов - подправил, вставил mega16 - работает. Сообщение о том, что экспертиза в Москве признала микросхему полностью работоспособной укрепила уверенность, что дело было в монтаже конденсаторов и кварца. Приходит микросхема из "ремонта" - вставляю ее, проверяю - не работает. Подключаю внешнее тактирование - читается, шьется, но не запускается. Иногда (!) если прикоснуться пальцами к зон монтажа кварца и конденсаторов - программа стартует, но с глюками. Теперь о деталях: Питание 5 V Внешний кварц - 16 Мгц Фьюзы: New fuses value OSCCAL = C6, C6, C0, C0 BLEV = 1 BODEN = 1 SUT = 2 CKSEL = F BLB1 = 3 BLB0 = 3 OCDEN = 1 JTAGEN = 1 CKOPT = 1 EESV = 1 BSIZ = 0 BRST = 1 Что характерно - даже если я не включаю в AVreal режим внешнего тактирования, кристалл шьется если вывод программатора подключен к XTAL1. Mega16 работает отлично. Даже при 3 вольтах без глюков тянет 16 Мгц. В чем дело? Микросхема то согласно заключению экспертизы исправна. Может я какой-то разницы не учел? -
Разница CodeVision и WinAVR
virtuality опубликовал тема в AVR
Гребаные идентификаторы.... Как просто было в CodeVision : PORTD.1=1; DDRD=1; Пытаюсь в WinAVR сделать - достал примерно следующий код: DDRD &= ~(_BV(PD2)); // Назначаем 2-ю линию порта D на вход PORTD |= (_BV(PD2)); // подключаем "подтягивающий" резистор Нельзя ли попроще как-нибудь? И еще вопрос - инициализирую АЦП - выдает беспорядочные хаотичные цифры. Понятно, что дело в том, что ловятся шумы. Вылечил резистором 4,7 кОм на питание. А как-нить программно нельзяли?