aske1
-
Постов
60 -
Зарегистрирован
-
Посещение
Весь контент aske1
-
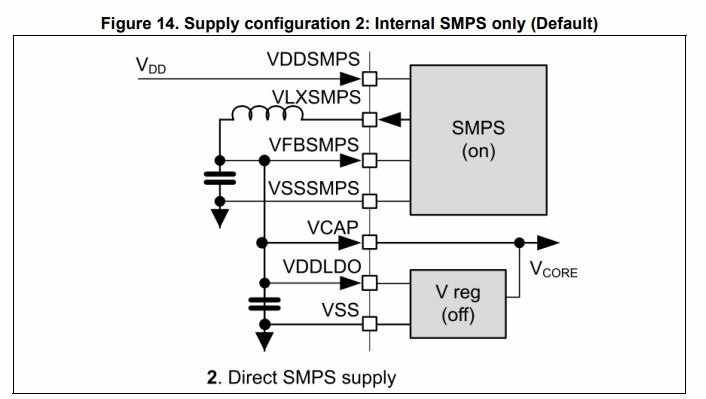
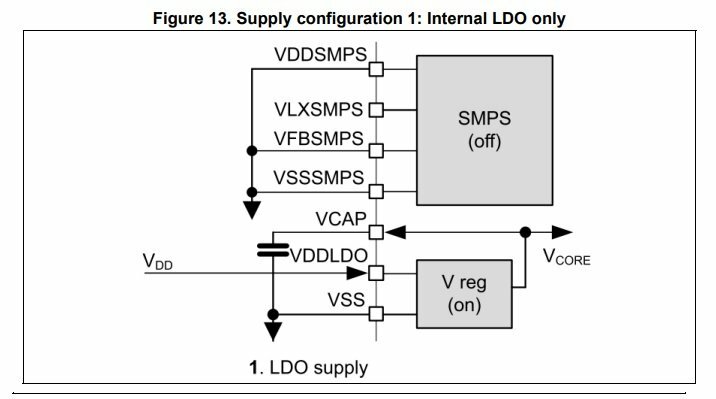
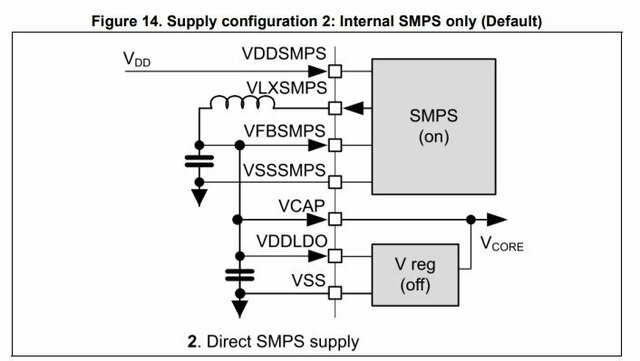
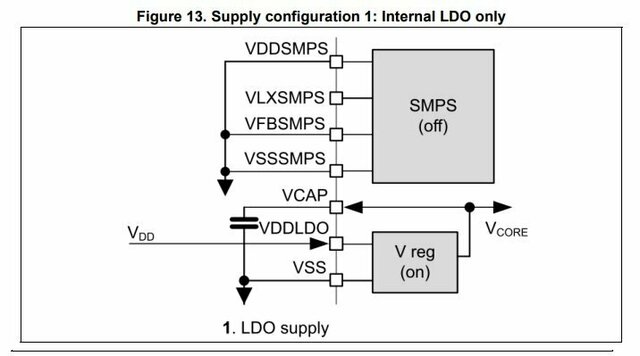
Здравствуйте! Хочу сделать плату с контроллером STM32H745, запутался в схемах подключения питания. В документации 6 или больше схем как можно подать питание на Vcore используя SMPS или LDO. Решил для себя, что мне нужно максимально просто без всяких SMPS и чтобы не было на плате питаний ниже 3,3В и чтобы частоту можно было максимальной сделать(вроде бы она максимальна только при включенном LDO). Значит получается надо через LDO. Нашел схему и мануал на плату STM32H745 Nucleo на том же контроллере. Там по дефолту почему то схема питания Direct SMPS и сказано, что чтобы поменять одно на другое надо сделать следующие настройки: в main.c в SystemClock_Config прописать для случая “Direct SMPS” (Default): HAL_PWREx_ConfigSupply(PWR_DIRECT_SMPS_SUPPLY);, а для случая “LDO”: HAL_PWREx_ConfigSupply (PWR_LDO_SUPPLY); Ниже привел схемы питания Direct SMPS и LDO. Вопрос не получится ли так, что я сделаю плату для случая питания Vcore от LDO, а у меня потом контроллер не получится прошить, т.к. допустим по умолчанию в новом мк включен SMPS, а LDO выключен? И что делать в таком случае, как подавать питание на Vcore - просто снаружи на конденсатор ножки Vcap (не забыв отключить Vdd =3,3В от Vddldo) ?
-
Синхронизация работы таймеров STM32. Не работает slave.
aske1 опубликовал тема в ARM, 32bit
Здравствуйте! Пытаюсь сделать так, чтобы один таймер STM32f407 TIM2 периодически запускал другой TIM1 и чтобы тот другой на лапке мк формировал импульс заданной длительности. Соответственно у таймера TIM2 взял настроил на выход канал CH1 и соединил его с каналом таймера TIM1 СH2, который настроил на вход, у TIM1 так же канал СH1 настроил на выход. С таймером TIM2 проблем нет. На его CH1 вижу периодически меняющийся сигнал. Проблемы с таймером TIM1 на его канале CH1 импульсов нет, хотя в отладчике вижу, что он считает хотя и как то странно (мне нужен 1 импульс, а он переполняется несколько раз) за время переполнения TIM2. Инициализацию TIM1 приложил. Подскажите пожалуйста что я делаю не так? Вроде всё должно быть просто, а уже столько времени потратил.. static void MX_SLAVE_TIM1_INIT(void) { //Форма импульса OPM определяется записью в регистры сравнения (с учетом тактовой частоты и прескалера счетчика). /* set the Timer prescaler to get 1MHz as counter clock */ RCC->APB2ENR |= RCC_APB2ENR_TIM1EN; /* configure the Timer prescaler */ TIM1->PSC = 9; /* configure the period */ TIM1->ARR = 500-1; /* configure the repetition counter */ // TIM1->RCR = 1; /* configure pulse width */ TIM1->CCR1 = 250 ; /* Select the Clock Division to 1*/ // TIM1->CR1 |= TIM_CLOCKDIVISION; /* Reset clock Division bit field */ TIM1->CR1 &= ~ TIM_CR1_CKD; //Отобразите TI2FP2 на TI2 записью CC2S=01 в регистре TIMx_CCMR1. TIM1->CCMR1 &=~(0x3UL << (8U)); TIM1->CCMR1 |=(0x1UL << (8U)); //TI2FP2 должен детектировать положительный перепад, для этого запишите CC2P=0 и CC2NP=0 в регистре TIMx_CCER 7?5 TIM1->CCER &=~(0x1UL << (5U)); TIM1->CCER &=~(0x1UL << (7U)); //Сконфигурируйте TI2FP2 в качестве триггера для контроллера подчиненного режима (TRGI) записью TS=110 в регистре TIMx_SMCR TIM1->SMCR &=~(0x7UL << (4U)); TIM1->SMCR |=(0x6UL << (4U)); //TI2FP2 используется для запуска счетчика путем записи SMS=110 в регистре TIMx_SMCR (режим триггера). TIM1->SMCR &=~(0x7UL << (0U)); TIM1->SMCR |=(0x6UL << (0U)); //разрешите PWM mode 2 записью OC1M=111 в регистре TIMx_CCMR1 TIM1->CCMR1 &=~(0x7UL << (4U)); TIM1->CCMR1 |=(0x7UL << (4U)); //Пользователь может опционально разрешить регистры предзагрузки записью OC1PE=1 в регистре TIMx_CCMR1 и ARPE в регистре TIMx_CR1 //В нашем примере биты DIR и CMS регистра TIMx_CR1 должны быть в лог. 0. TIM1->CR1 &=~(0x1UL << (4U)); TIM1->CR1 &=~(0x3UL << (5U)); // Когда бит OPM в регистре TIMx_CR1 установлен в 0, выбирается режим повторения (Repetitive Mode) TIM1->CR1 &=~(0x1UL << (3U)); /* * Если пользователь хочет вывести сигнал с минимальной задержкой, * то должен быть установлен бит OCxFE в регистре TIMx_CCMRx. * Тогда OCxRef (и OCx) принудительно будут установлены в ответ * на сигнал стимула, без обращения внимания на сравнение. * Новый уровень такой же, как если бы произошло совпадение сравнения. * OCxFE действует только если канал сконфигурирован в режиме PWM1 или PWM2. * */ TIM1->CCMR1 &=~(0x1UL << (2U)); TIM1->CCMR1 |=(0x1UL << (2U));//Output compare 1 fast enable /* Enable the TIM Counter */ // TIM1->CR1 |= TIM_CR1_CEN; } while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ ch1=TIM1->CNT ;//тот что slave ch2= TIM2->CNT ; // мастер ch5=TIM1->SMCR; if(ch1==251){ ch3=ch3+1;//сколько раз slave } if(ch2==999){ ch4=ch4+1;//сколько раз master } }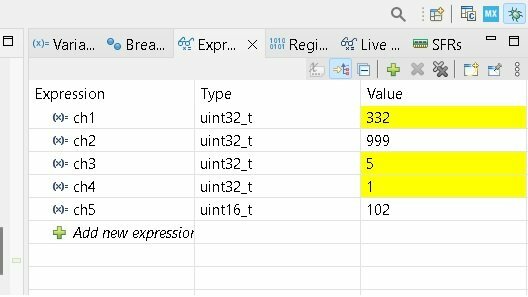
-
Доброго дня! Есть внешний сигнал, хочу по его фронту формировать импульсы заданной длительности (10мкс - 30мкс). Нарыл в нете, что мне поможет OPM, нашёл похожий пример. Пытаюсь в cube ide сделать это, скрины настроек приложил. Ничего не получается (TIM8_CH1 - не меняется). Внешний сигнал подаю на ножку TIM8_CH2 через резистор 1кОм, Сажусь прямо на неё осц-фом, вижу на ней сигнал очень мелкой амплитуды (как будто она настроена как выход, а не на вход - что тоже странно). Cube ide генерит следующий код инициализации: static void MX_TIM8_Init(void) { /* USER CODE BEGIN TIM8_Init 0 */ /* USER CODE END TIM8_Init 0 */ TIM_SlaveConfigTypeDef sSlaveConfig = {0}; TIM_MasterConfigTypeDef sMasterConfig = {0}; TIM_OC_InitTypeDef sConfigOC = {0}; TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0}; /* USER CODE BEGIN TIM8_Init 1 */ /* USER CODE END TIM8_Init 1 */ htim8.Instance = TIM8; htim8.Init.Prescaler = 9; htim8.Init.CounterMode = TIM_COUNTERMODE_UP; htim8.Init.Period = 200-1; htim8.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim8.Init.RepetitionCounter = 0; htim8.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim8) != HAL_OK) { Error_Handler(); } if (HAL_TIM_OC_Init(&htim8) != HAL_OK) { Error_Handler(); } if (HAL_TIM_OnePulse_Init(&htim8, TIM_OPMODE_SINGLE) != HAL_OK) { Error_Handler(); } sSlaveConfig.SlaveMode = TIM_SLAVEMODE_TRIGGER; sSlaveConfig.InputTrigger = TIM_TS_TI2FP2; sSlaveConfig.TriggerPolarity = TIM_TRIGGERPOLARITY_RISING; sSlaveConfig.TriggerFilter = 0; if (HAL_TIM_SlaveConfigSynchro(&htim8, &sSlaveConfig) != HAL_OK) { Error_Handler(); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterOutputTrigger2 = TIM_TRGO2_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim8, &sMasterConfig) != HAL_OK) { Error_Handler(); } sConfigOC.OCMode = TIM_OCMODE_PWM2;//поменял, так было в примере sConfigOC.Pulse = 5; sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; if (HAL_TIM_OC_ConfigChannel(&htim8, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) { Error_Handler(); } sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE; sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE; sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF; sBreakDeadTimeConfig.DeadTime = 0; sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE; sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH; sBreakDeadTimeConfig.BreakFilter = 0; sBreakDeadTimeConfig.Break2State = TIM_BREAK2_DISABLE; sBreakDeadTimeConfig.Break2Polarity = TIM_BREAK2POLARITY_HIGH; sBreakDeadTimeConfig.Break2Filter = 0; sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE; if (HAL_TIMEx_ConfigBreakDeadTime(&htim8, &sBreakDeadTimeConfig) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN TIM8_Init 2 */ /* USER CODE END TIM8_Init 2 */ HAL_TIM_MspPostInit(&htim8); } //запускаю так HAL_TIM_OnePulse_Start(&htim8, TIM_CHANNEL_1); Если кто сталкивался, прошу подсказать что я делаю не так?


-
Спрошу здесь чтобы не плодить подобных тем. Хотелось бы задавать значение периода и чтобы с заданным периодом формировались импульсы (нужной одной и той же длительности) чтобы транзисторами полу-моста управлять (как на рисунке) естественно аппаратно. Можно это как то реализовать на таймерах STM ?

-
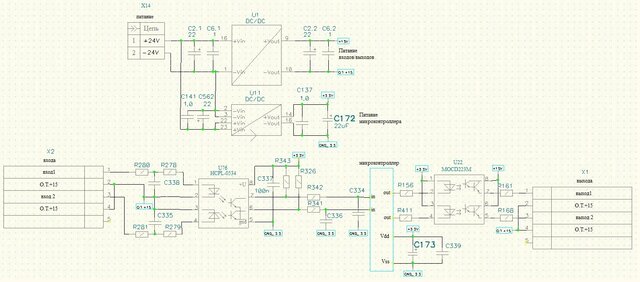
Здравствуйте! Делаем высоковольтные источники питания, система управления которых построена на микроконтроллере. Для борьбы с наводками микроконтроллер гальванически отвязан от силовой части (транзисторного преобразователя) оптронами, выходящие из источника медленные входа/выхода отвязаны с помощью реле. Стоит куча dc/dc-преобразователей, питающих все эти отвязанные друг от друга цепи, общие точки dc/dc-преобразователей всех этих цепей висят в воздухе ( не заземлены). В общем схема системы управления похожа на схему на рисунке. Недавно открыли похожий китайский источник: у них гальванических развязок похоже нет или практически нет и dc/dc-преобразователей соответственно тоже не видно. Отсюда вопрос: а так ли они нужны? (оптроны и dc/dc стоят кучу денег, к тому же из за проходной емкости оптроны не всегда спасают от наводок). Прошу поделиться кто как делает?