Ericco Inertial
-
Постов
83 -
Зарегистрирован
-
Посещение


-
поставщик
Ericco Inertial опубликовал тема в Поставщики всего остального
Мы являемся компанией по продаже электронных датчиков из Китая. Ericco, основанная в 2006 году, является групповой корпорацией в Китае и специализируется на исследованиях, разработках и производстве всех видов инерционных датчиков и систем инерциального позиционирования/ориентации/навигации/измерения ориентации, таких как гироскоп MEMS, акселерометр MEMS, FOG North Finder, mems North Seeker и т. д., для отправки нашей продукции мы можем воспользоваться любой логистической компанией, выбор за вами, у нас большая группа клиентов в России. У нас есть профессиональная команда по закупкам и профессиональная группа по проверке продукции. Совершенно новый, мы все можем предоставить вам источник товара. Пожалуйста, свяжитесь со мной, если необходимо. Вы можете посетить наш сайт: https://www.ericcointernational.com/north-finders. По вопросам оптовых закупок, делового сотрудничества и кастомизации обращайтесь: Тел: +8613992884879 What'sapp: 13630231561 Электронная почта: [email protected]


-
Продаю инерционные единицы измерения.
Ericco Inertial опубликовал тема в Продам
Ищущий север MEMS IMU ЭР-МИМУ-01 (0,02 град/час) Высокопроизводительная навигация MEMS IMU ЭР-МИМУ-02 (0,05 град/час) Высокоточная навигация/стабильный контроль MEMS IMU ER-MIMU-03 (<0,3 град/час) Недорогой MEMS IMU с контролем ориентации ЭР-МИМУ-04 (1 град/час) Высокоточный MEMS IMU с поиском на север ЭР-МИМУ-05 (0,02°/ч) Высокоточная навигация MEMS IMU ЭР-МИМУ-06 (0,05°/ч) Высокоточный MEMS IMU со стабильным контролем ER-MIMU-07 (<0,3°/ч) Недорогой MEMS-инерционный измерительный блок ER-MIMU-08 (≤1°/ч) Если вы заинтересованы в продукте IMU, вы можете отправить мне сообщение или отправить электронное письмо на адрес [email protected].
-
Продам малогабаритный гироскоп DTG.
Ericco Inertial опубликовал тема в Продам
ER-DTG-E1 Малогабаритный (21,4 мм) гироскоп DTG используется в скважинных гироскопических приборах, каротажных приборах и многих других системах для поиска или ориентации на север. Особенности: Сильная ударопрочность, очень маленький размер, широко используется в инструментах для гироскопических исследований скважин и инструментов для каротажа скважин, динамическая ориентация и позиционирование.
-
Инерциальные навигационные системы из Китая
Ericco Inertial опубликовал тема в Продам
Миниатюрный трехосный MEMS North Seeker Высокоточный FOG North Seeker Поворотный стол с одноосным позиционированием Подождите много продуктов Всем привет, я много лет занимаюсь инерциальной навигацией, если вам интересна эта отрасль, вы тоже можете задать мне вопрос, и я отвечу на ваши сомнения. Я приехал сюда, чтобы продать нуждающимся продукцию моего давнего партнера ERICCO — высокоточные контрольно-измерительные приборы, микросхемы и системы производства известных китайских заводов. Содержит самое компактное и высокоточное оборудование в мире с отличным соотношением цены и качества. Все цены указаны в договоре, я прикреплю фотографии и ссылки на сайты, если кого-то заинтересует, пожалуйста, оставьте информацию о компании или личные данные и адрес электронной почты. Если вы заинтересованы в этом продукте, вы можете оставить свою информацию по электронной почте, и я вышлю каталог и техническое описание! Контактный адрес электронной почты: [email protected]
-
 Ericco Inertial изменил фотографию своего профиля
Ericco Inertial изменил фотографию своего профиля -
Продам МЭМС, датчик, гироскоп, модуль
Ericco Inertial опубликовал тема в Продам
Всем привет, я много лет занимаюсь инерциальной навигацией, если вам интересна эта отрасль, вы тоже можете задать мне вопрос, и я отвечу на ваши сомнения. Я приехал сюда, чтобы продать нуждающимся продукцию моего давнего партнера ERICCO — высокоточные контрольно-измерительные приборы, микросхемы и системы производства известных китайских заводов. Содержит самое компактное и высокоточное оборудование в мире с отличным соотношением цены и качества. Если вы заинтересованы, пожалуйста, оставьте информацию о компании или личную информацию и адрес электронной почты. Вы также можете отправить мне личное сообщение напрямую!! https://www.ericcointernational.com/products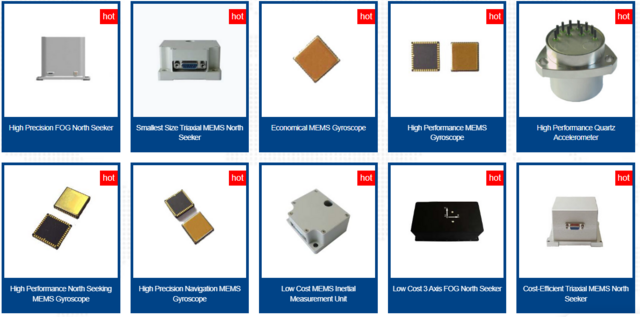
-
Самый высокоточный MEMS North Seeker в мире
Ericco Inertial опубликовал тема в Объявления пользователей
Название: ER-MNS-05 (0,5°/1°) Функции: 1. Трехосный MEMS North Seeker; 2. Миниатюрный размер и высокая производительность; 3. Полная температурная компенсация. Введение: 1. Технические характеристики Трехосный гироскоп и акселерометр MEMS Полная температурная компенсация Высокая производительность и компактный размер Легкий вес, низкое энергопотребление Устойчив к агрессивной механической среде Иметь функцию онлайн-обновления программного обеспечения Приложения Добыча угля Бурение нефтяных скважин Строительство тоннеля геодезия Статическая начальная настройка пуска ракеты, наведения оружия Контроль направления радара, антенны, транспортного средства Технические характеристики Если вы заинтересованы в этом продукте, вы можете оставить информацию о своей компании по электронной почте, и я вышлю каталог и техническое описание!
-
Поскольку промышленное оборудование, как правило, оцифровано и взаимосвязано, была реализована Индустрия 4.0, которая помогает трансформировать производственные инструменты. Это меняет правила игры, делая производственную цепочку более гибкой, поддерживая производство индивидуальных продуктов, сохраняя при этом прибыльность. Кроме того, цифровые и промышленные соединения Интернета вещей также очень полезны для обслуживания. После использования датчиков, особенно кварцевых акселерометров, вы можете анализировать рабочее состояние машины вместо регулярной замены изношенных деталей. В рамках профилактического обслуживания операторам необходимо вмешиваться только тогда, когда возникают некоторые ранние предупреждающие симптомы. Этот анализ состояния машины называется мониторингом состояния (CbM), который может контролировать стоимость обслуживания по сравнению с системой систематического обслуживания, основанной на обычно очень консервативном фиксированном графике. В дополнение к более гибкому плану операций технического обслуживания, он также может обнаруживать проблемы на ранней стадии, чтобы операторы могли соответствующим образом организовать время простоя машины. Очевидно, что это намного лучше, чем время простоя вне производственной линии. Анализ вибрации: важность датчиков Измерение вибрации с помощью акселерометра ER-QA-03A Высокопроизводительный кварцевый акселерометр Полоса пропускания 800 ~ 2500 Гц, объем 25,4X30 мм, вес 80 г, с высокой надежностью в основном используется в инерциальных измерительных и испытательных системах в аэрокосмической и авиационной областях. Он может выполнять статические и динамические испытания, которые являются стандартным датчиком вибрации. Если вы заинтересованы, вы можете оставить свой адрес электронной почты, и я вышлю каталог и техническое описание!