Koctix
-
Постов
12 -
Зарегистрирован
-
Посещение
-
Спасибо за ответы. Strap пины я так понимаю выведены на плату KC705, там это задается джамперами. Или вы не об этом? Постараюсь тогда написать модуль для конфигурации по mdio, все равно вариантов у меня не остается
-
Да назначены, CLK с W5. Вот скрин пинов:

-
LVDS на плис XILINX
Koctix опубликовал тема в Работаем с ПЛИС, области применения, выбор
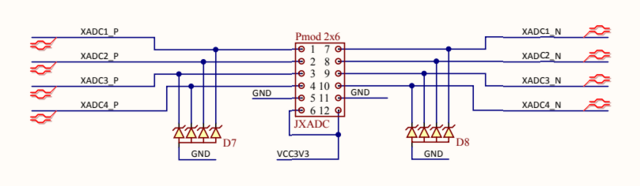
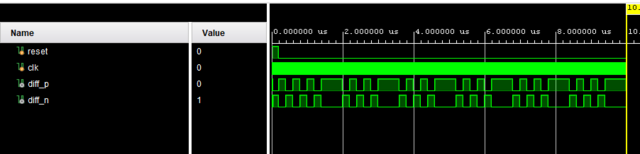
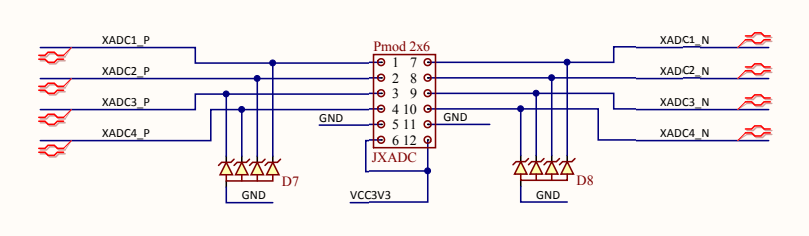
В проекте есть необходимость использовать LVDS, в документации на Xilinx 7ой серии UG953 нашел OBUFDS с примером использования, и попробовал подключить только его для проверки работоспособности, получился следующий код: module LVDS( input logic reset, input logic clk, output logic diff_p, output logic diff_n, output logic Inp ); logic Inp_inv; logic [7:0] data=8'b11010101; logic [3:0] i; logic [5:0] div; OBUFDS #( .IOSTANDARD("DEFAULT"), .SLEW("SLOW") ) OBUFDS_inst ( .O(diff_p), .OB(diff_n), .I(Inp) ); always_ff @(posedge clk or posedge reset)begin if(reset)begin Inp <= '0; Inp_inv <= '1; i <= '0; div <= '0; end else begin Inp <= data; Inp_inv <= !data; if(div==9)begin if(i<7) i <= i+1; else i<=0; div <= 0; end else div <= div+1; end end В симуляциях все работает: Но когда загрузил на плату, то никаких сигналов с выхода не увидел. Плату использую Basys 3 от digilent, по схеме нашел куда подключаются диф. пары (использовать решил выводы микросхемы J3 и K3 они соответсвуют цепям XADC1_P и XADC1_N). Скрин со схематика: Возможно что-то не так подключил или есть какие-то еще нюансы, может сможет кто помочь. Заранее спасибо