Olegus
-
Постов
51 -
Зарегистрирован
-
Посещение
Информация о Olegus
-
Звание
Участник
")
-
F28379D LaunchPad и MPU6050 по I2C
Olegus ответил Olegus тема в Интерфейсы
Вот как смог своим осциллографом заснял два случая (рабочий и нет). Если что-то можно увидеть.

-
F28379D LaunchPad и MPU6050 по I2C
Olegus опубликовал тема в Интерфейсы
Здравствуйте. Соединил по I2C MPU6050 and F28069M LaunchPad все работает хорошо. Но при соединении по I2C MPU6050 and F28379D LaunchPad нет данных и такое ощущение, что датчик молчит. Датчик тот же, процессоры из одной и той же линейки, т.е. шлю те же запросы в те же регистры, а на выходе нуль. Скрин SDA and SCL прикрепил (снимал анализатором Logic 2). Как видно датчик не прижимает шину к земле на девятом такте, как я понимаю, а почему не понимаю? Соединение с подтяжкой линий SDA and SCL на 2,2кОм к питанию - схемотехника такая же как и для нормально работающего варианта F28069M LaunchPad. Может кто подскажет или натолкнет на мысль новичка в чем разница может быть? Спасибо.
-
ST Nucleo STM32F411 + ICM 20948
Olegus ответил Olegus тема в ARM, 32bit
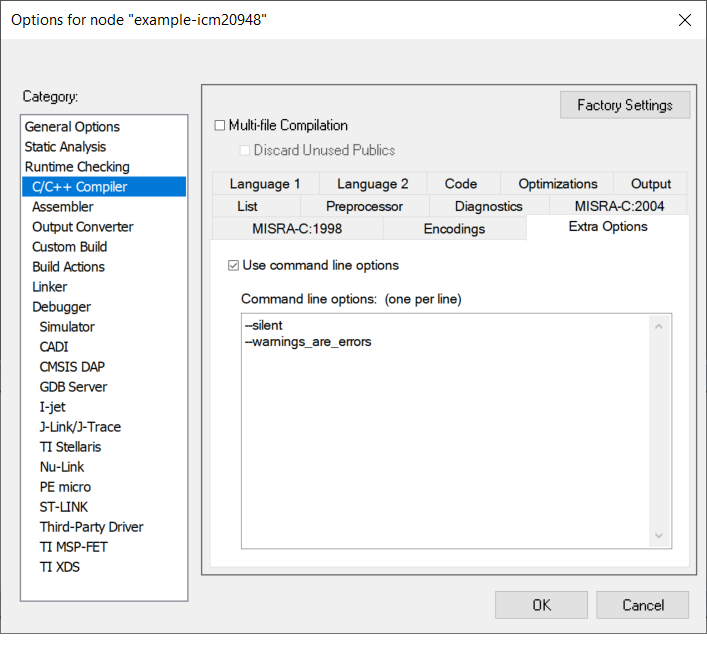
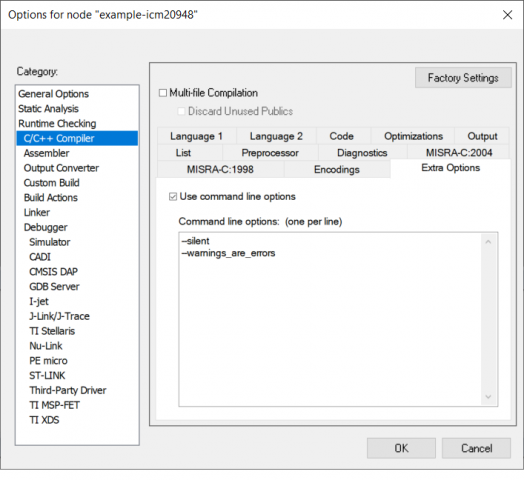
Это вкладка Diagnostics? Галочка Treat all warnings as errors не стоит!? Или же может во вкладке Extra Options убрать --warnings_are_errors?!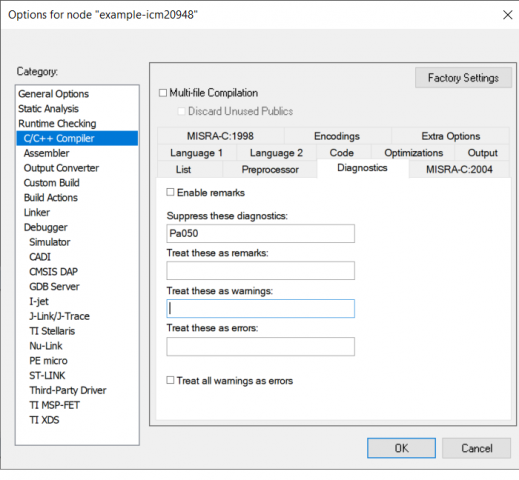
-
ST Nucleo STM32F411 + ICM 20948
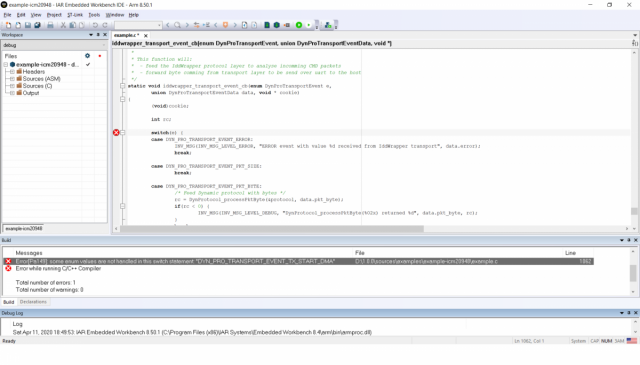
Olegus опубликовал тема в ARM, 32bit
Я использую ST Nucleo STM32F411 + ICM 20948 daughterboard + Nucleo Carrier Board verB and ICM-20948 eMD 1.0 for Nucleo Board. ICM 20948 -это акселерометры фирмы InvenSense, они предлагают готовый проект для IAR, но когда пытаюсь откомпилировать и загрузить выдает ошибку: Error[Pa149]: some enum values are not handled in this switch statement: “DYN_PRO_TRANSPORT_EVENT_TX_START_DMA” D:\1.0.0\sources\examples\example-icm20948\example.c 1062. Error while running C/C++ Compiler. Эта ошибка указывает на строку кода в файле example.c, но переменной с именем DYN_PRO_TRANSPORT_EVENT_TX_START_DMA в этом файле вообще нет. Может кто подскажет о чем это?