Чисто по опыту, в каждой схеме есть свои плюсы и минусы.
а) шунт на фазе
применим при низком питающем напряжении, нужно 2 шунта на 2х фазах. Защиту от КЗ на нем не сделаешь. Из плюсов - позволяет земерять ток в любой момент времени.
б) датчик холла на фазе
Для больших токов оптимальный вариант. Единственный недостаток - есть небольшой гистерезис.
в) 3 шунта на минусе
Позволяет сделать защиту от КЗ, из минусов - на низких оборотах фазный ток течет через 2 шунта, что греет шунты.
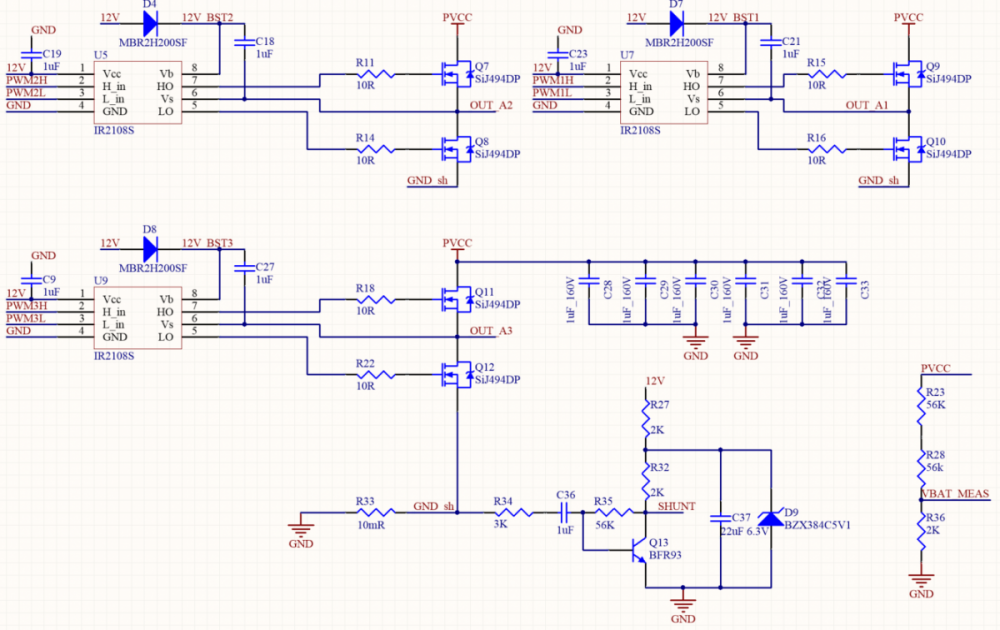
г) 1 общий шунт на минусе от 3х фаз
Позволяет сделать защиту от КЗ, из минусов - нужно делать дельта-модуляцию и несколько хитрить с ШИМом на высоких оборотах. Но на низких оборотах ток течет между ФЕТами напрямую, минуя шунт. Также точки измерения токов в разных фазах смещены по времени и при большой дельте тока в рамках одного ШИМ импульса будет давать некую ошибку тока. Его можно частично скомпенсировать математикой, но далеко не идеально.
Варианты В и Г для частот выше 30-40 кГц подходят не очень хорошо, ибо нужно время для стабилизации показаний на шунте. Ну и требует АЦП с возможностью захвата в нужных временных точках.
Чтоб посоветовать лучшую схему для конкретной задачи, надо знать напряжение, фазный ток, индуктивность мотора, обороты.